
Robotautók
ÉLETEKET, IDŐT ÉS PÉNZT TAKARÍTANAK MEG
Asszisztensek révén, a robotautók máris jelen vannak a gépkocsik csúcsmodelljeiben. Hamarosan a számítógépeik válnak az autók legfontosabb részévé, és ettől fogva a számítástechnikából ismert Moore-törvény ütemében gyorsul a közlekedés fejlődése. Automatikus gépkocsi fejlesztéséről a Mercedes, a Cadillac, a VW/Audi, a BMW, a Volvo, a Toyota, a Nissan és a GM tett bejelentést. Autógyártók eddig Nevadában, Kaliforniában és Floridában kaptak hatósági engedélyt, automatikus járműveik kísérleti kipróbálására. A robotautók átformálják a közlekedést. Előbb, mint gondolnánk.

A kényelmes utazás igénye egyidős a gépkocsival
A kényelmes utazás igénye egyidős a gépkocsival. Katonai járműveken, az élő erő védelme érdekében ma már alapkövetelmény a vezetés automatizálása. Ezen olyan tevékenységet értünk, amely az emberi vezetés folyamatsorozatát önállóan, további beavatkozás nélkül, információs technológiák alkalmazásával hajtja végre, az emberi munka csökkentése és/vagy kiküszöbölése céljából.

Az Audi a Bonneville-i tó sóburkolatán és a Pikes Pike szerpentinjein, a Stanford Egyetem színeiben tesztelte GPS-antennás, TTS robotkupéját
A torpedókon, a V1 és V2 megtorló fegyvereken át a pilóta nélküli repülőkig, a vezető nélküli járművek meghatározó eszközeivé váltak a haditechnikának. Az USA légierejének harmadát pilóta nélküli járművek alkotják, és már a szárazföldi járműveik fejlesztése mögött is évtizedes tapasztalat áll. Napjainkban ennek a technikának a polgári visszahatása, megatendenciaként forradalmasítja a közúti közlekedést.

Nevadában a Google robotautója kapta a pilóta nélkül vezethető automatikus járművek kísérleti közút használatra jogosító, 001 számú, piros rendszámtábláját
A robotautók használatáról
– Nevadában, Kaliforniában és Floridában már engedélyt kaptak a robotautók, a kísérleti célú úthasználatra. Hasonló engedélyezés, más szövetségi államban is várható. Addig azonban, számos, további jogi akadályt kell megszüntetni.
– A robotjárműveket eredetileg katonai célra fejlesztették ki. Azóta azonban a polgári járművek irányítástechnikája, a vezetői asszisztensek elterjedése nyomán olyan szintre bővült, amely eléri a katonai robotok nyilvános videókon megfigyelhető alkalmazási szintjét.
– Egyszemélyes villamos robotautók. Nem tudjuk, ki ölte meg a villamos autókat, az azonban bizonyos, hogy elterjedésükkel a sűrűn lakott városokban az egyszemélyes, villamos robotok fogják feléleszteni.
– Az automatikus villamos gépkocsik a nagyvárosokban 80%-kal is csökkenthetik a városi gépkocsik üvegházgázainak kibocsátását.
– Kevesebb olajháború. A villamos hajtású robotjárművek energiaigényének megújuló forrásokból végzett kielégítése nagymértékben csökkenti a konfliktusos térségekből származó kőolajimport szükségességét.
– Az egyszemélyes, használaton kívül egymásba tolva tárolható, villamos robotautók várható elterjedése jelentősen meggyengíti a közösségi közlekedés utasonként 9–10-szer nagyobb fajlagos fogyasztású, külön forgalmi sávot, megállókat és parkolókat igénylő városi buszok, kizárólagos használatának indokolhatóságát.
– A robotjárművek használata nem igényel külön forgalmi sávokat, hanem más járművekkel közös forgalmi sávokban is megfelelően közlekedhetnek.
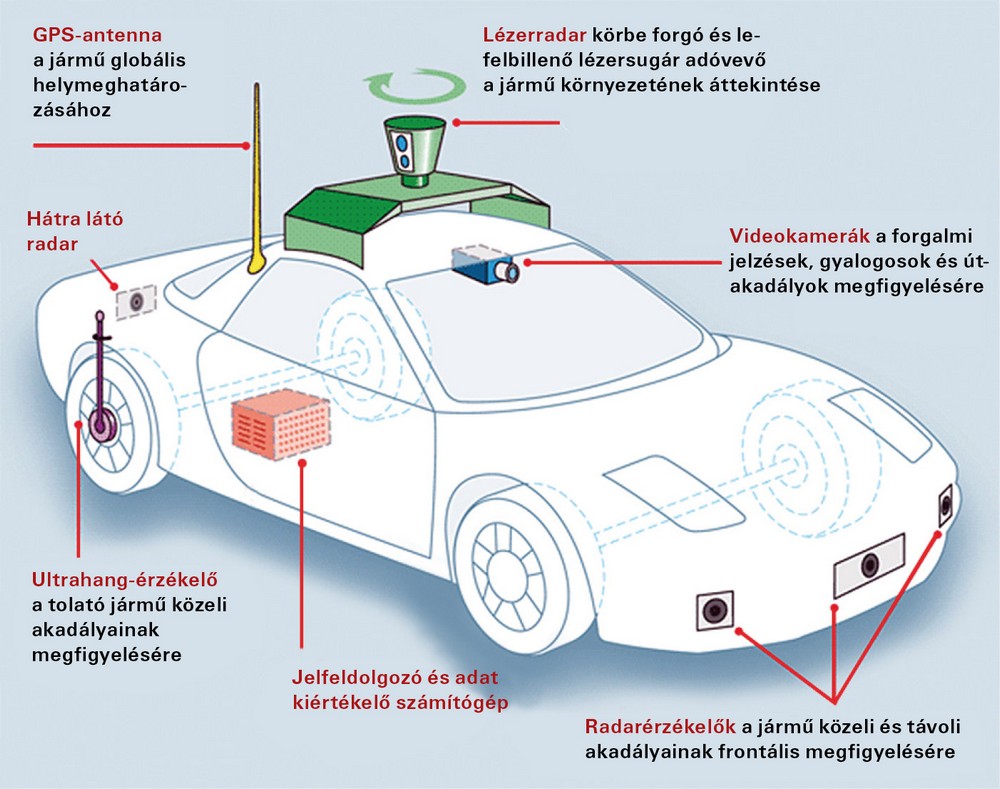
A Google-robot érzékelői
– A robotjárművek bevezetését mindmáig halogatjuk, pedig életmentő szerepük a legjelentősebb. Használatuk napjainkban, csak az USA-ban 33 ezer, globálisan 1,2 millió baleseti áldozat életének megmentését jelenti.
– A robotjárművek használata megszünteti a nagyvárosi parkolóhely hiányt. Számukra az új városok már parkolók nélkül épülhetnek.
– A robot járművek alkalmasak alternatív üzemanyagok használatára. A robotok használaton kívüli idejében ugyanis közömbös az üzemanyag fajtája, illata, a töltőhely kialakítása, vagy a feltöltés gyakorisága.
– Megfelelő járművet megfelelő helyre. Az intelligens mobiltelefon alkalmazások a sűrűn lakott városokban széles lehetőséget kínálnak a robotjárművek használatának. Ráadásul jóval olcsóbban üzemeltethetőek.
– A robottaxik használata számottevő munkaerőt szabadíthat fel a világ sűrűn lakott városaiban.

A Robert Bosch boxbergi kísérleti pályáján próbálgatja sok érzékelős robotautóját. 1. Lézerszkenner. 2. GPS-antenna. 3. Hátsó, 4. oldalsó megfigyelést végző radar. 5. Első megfigyelést végző sztereo kamera. 6. Első megfigyelést végző közeli, 7. távoli radarérzékelő
– A gépkocsi-robotizálásnak nem feltétele az állami tőkeforrás. Így az magánvagyonokból és egyéni forrásokból is eredményesen fejleszthető.
– A robotizálás zömében elektronikai fejlesztésekhez szükséges forrásigénye alulról felfelé építkezve, vásárlói kölcsönkötvényekből is finanszírozható.
– Az áruszállító robotok számos ritka termék körébe is bevezethetik a just in time (épp a megfelelő időben végzett) áruszállítást.
– A gépkocsik robotizálása a sűrűn lakott régiókban az előnyökön túl komoly hatalmi befolyást is jelent. Főképp Szingapúr, Kína, India vagy Japán nagy forgalmú térségei veszélyeztethetik az amerikaiak prioritását.
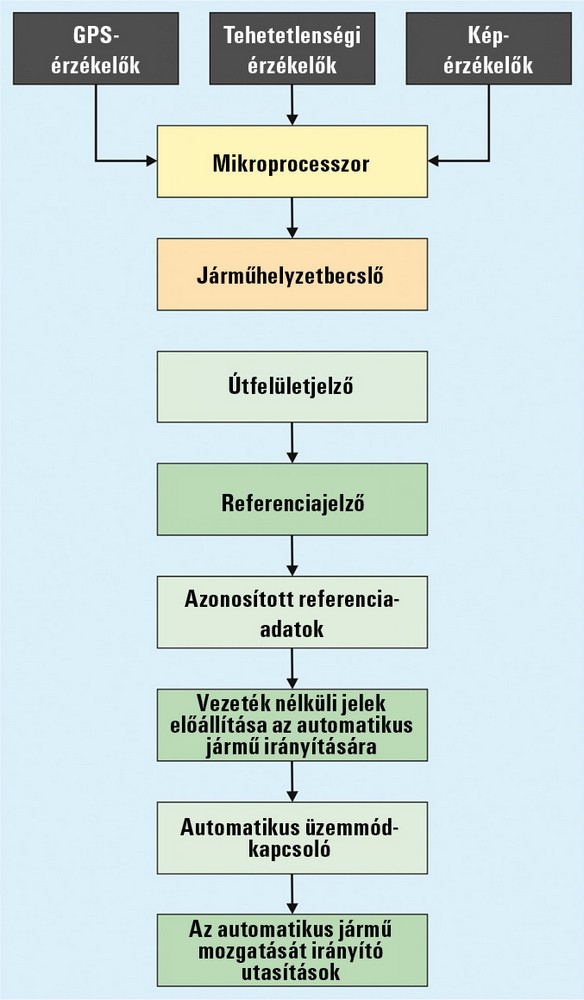
A Google-robot irányítási folyamatának eszközei és információs tömbvázlata
Technológiaváltás és baleseti jellemzők

Volvo menetoszlop, amelyben minden együtt haladó járműnek meghatározott szerep jut
Az autonóm járművek fejlesztése a legtöbbet a vezetői asszisztens rendszerek eredményeiből profitál. Ezek ismeretében a fejlesztők úgy tartják, hogy a robotautó legalább olyan mélyen át tudja alakítani a társadalmat, mint az internet.
A robotjármű másodpercenként hússzor elemez és határoz a teendőiről. Nem töpreng, hanem dönt, és beavatkozik. Fékez például és kanyarodik. A biztonság érdekében ugyanis így van programozva. A robotjárművek hibatűrőnek készülnek. Az ember nem az, hiszen az információkkal való túlterheléstől ugyanúgy kiakad, mint a vezetési monotóniától.
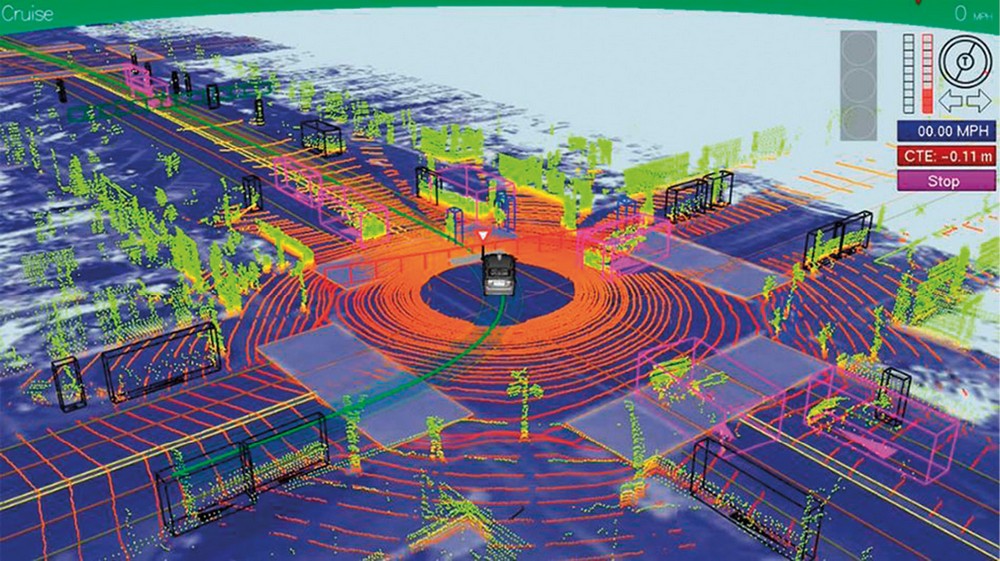
A robotjárművek 60–70 méteres tartományban három dimenzióban érzékelik környezetüket, és gyorsabban reagálnak a humán vezetésűekénél. Működésüket nem kockáztatja sem álmosság, sem ittas vagy drogos vezetés. Ennél fogva a forgalombiztonságuk a jelenleginél magasabb szintre emelhető.
A robotautók kontrollált nyomvonalon közlekednek, ezért a jelenleginél kisebb oldaltávolság is elegendő a biztonságos haladásukhoz.
A lézerradar körbe forgó antennája 360 fokos képet érzékel a jármű 60 méter átmérőjű környezetéről
A kisebb ütközési valószínűség közlekedő robotautók a pilótával vezetettnél könnyebbnek építhetőek, ami számottevően csökkenti az üzemanyag-fogyasztásukat. Ahhoz azonban hogy valóban biztonságosabbak legyenek, zavarérzéketlenebbé kell tenni a működésüket, és a mai személyi számítógépekénél magasabb szintre kell emelni működésük megbízhatóságát.
A vezetés automatizálása újító (innovatív), bomlasztó (diszruptív) vagy felforgató (szubverzív) technológiaváltással jöhet létre. Bármilyen technológiai váltás ezek valamilyen arányú keverékéből áll, és nem kétséges, hogy sürgetőbb a gépkocsik villamosításánál. Itt ugyanis emberéletekkel mérik a bevezetés késlekedését. A magasabb prioritás miatt sorrendi változtatást igényel. Nem szűkebb körben mint világszerte, ahol milliónál több a baleseti halálozás, és növekvő tendenciájú. Nálunk épp nem, világméretekben viszont igen. Az eddigi projektek tervezői sehol sem számoltak prioritásváltással.

Sebastian Thurn professzor, a járműirányító rendszerek fejlesztésének „atyja”, DARPA futamgyőztes robotautójával
A sorrendmódosulás az évkezdet óta ismert, és azt Dieter Zetsche, a Daimler-Benz vezérigazgatója jelentette be a duisbergi egyetem kecskeméti gyáravatást megelőző szimpóziumán.
A robotautók balesetcsökkentő hatása meghökkentően kedvező. Évente 33 ezer életet menthetnek meg (és 1 millió személyi sérülést kerülhetnek el) egyedül az USA-ban.
Ugyanez egymillió életet és 33 millió sérülést jelent a világon. Többnyire fiatal emberekét. Az ő korosztályuk az, amelyben az autóbalesetek minden más halálozási okot megelőznek.
Mit takaríthatnak még meg a robotjárművek?
– 230 milliárd dollár baleseti kiadást, az USA GDP 2–3%-át.
– 50 milliárd órányi utazási időt, az USA GDP 8%-át.
– 190 milliárd liter benzin importját, melynek emissziós hatása az USA CO2-kibocsátás és levegőszennyeződés 12–15%-át teszi ki.
– 600 millió parkolóhelyet, az USA városi területeinek 10%-át.
Az egész bolygóra vonatkoztatva, az utóbbiak ötszörösével számolhatunk.
Egy személyes történet
A gépkocsik automatizálásának egyszer szükségszerűen el kellett kezdődnie. Nem annyira az autógyártók, mint inkább egyetemi koponyák kezdték művelni. A megoldás ugyanis olyan elméleti megalapozást és érzékelésmódot igényelt, melynek megvalósítására a technika korábban és talán ma sincs kellőképpen felkészülve.

Rajzos előrejelzés arról, hogy a Continental mikorra prognosztizálja a különböző mértékben automatizált gépkocsik bevezetését
A jármű stabil mozgását ugyanis gyors beavatkozással, számos, véletlenszerűen változó körülmény esetén is fenn kell tartani. Hibamentesen, a legkisebb kockázattal, és a legnagyobb megbízhatósággal. Tekintve, hogy a vezető és az utasok életéről van szó. Azokról, amelyek megőrzése az automatizálás legfőbb követelményét jelenti.
A megoldás keresését egy különös pályázat hívta életre: az amerikai hadiipar kutatóintézete, a DARPA írta ki versenygyőzelemhez kötve az alkalmasság bizonyítását. Ezt, a sivatagi terepen folytatott versenyt Thrun professzor vezetésével a Stanford Egyetem csapata nyerte, aki a következővel kezdte YouTube-on is látható előadását:
„Kisfiúként imádtam az autókat. 18 éves koromban, egy autóbalesetben, egy csettintésnyi idő alatt halt meg a legjobb barátom. Aztán eldöntöttem, hogy annak szentelem az életem, hogy minden évben, megmentsek egymillió embert. Még nem sikerült, tehát ez csak amolyan helyzetjelentés, de azért vagyok itt, hogy beszélgessünk egy kicsit a vezető nélküli autókról.

A Volvo járműoszlopában a kisebb légellenállás 5–15% üzemanyag megtakarítását teszi lehetővé
Először a DARPA (Defense Advanced Research Projects Agency) Grand Challenge során találkoztam a gondolattal, ahol is az amerikai kormány díjat tűzött ki olyan autók építésére, melyek a sivatagban önmaguktól is eltájékozódnak. És, bár száz csapat vett részt, ezek az autók nem nagyon mentek sehová. Így tehát a Stanford Egyetemen úgy döntöttünk, hogy másfajta autót hozunk létre. Annak a hardver és szoftver részét is magunk készítettük. Úgy alkottuk meg, hogy tanítható legyen, és tanuljon tőlünk, majd szabadjára engedtük a sivatagban. És megtörtént az elképzelhetetlen: az lett az első autó, amely valaha visszatért egy DARPA Grand Challenge-ről, 2 millió dollárt nyerve a Stanford Egyetemnek. Még mindig nem mentettem meg egy árva lelket sem. Munkánk során arra összpontosítottunk, hogy olyan autókat építsünk, amelyek maguktól elmenni bárhová és Kalifornia bármely utcáján képesek közlekedni. 225 ezer kilométert vezettünk. Az autóinkban vannak érzékelők, melyek varázslatos módon képesek mindent látni maguk körül, és döntéseket hozni a vezetés minden fontos szempontját illetően. Ez a tökéletes vezetési mechanizmus. Olyan városokban vezettünk, mint San Francisco – Megtettük a San Francisco-Los Angeles távot az 1. számú autópályán. Találkoztunk kocogókkal, zsúfolt autópálya-szakaszokkal, ellenőrző kapukkal, és mindezt anélkül, hogy valaki is ült volna a volán mögött. Az autó önmagát vezetve közlekedett. Azok, akikkel az úton találkoztunk, tulajdonképpen ezt nem is vették észre. Hegyi utakon, éjjel és nappal, sőt, még San Francisco nyakatekert Lombard utcáján is jártunk. Járműveink néha annyira megőrültek, hogy apró kis mutatványokat adtak elő.
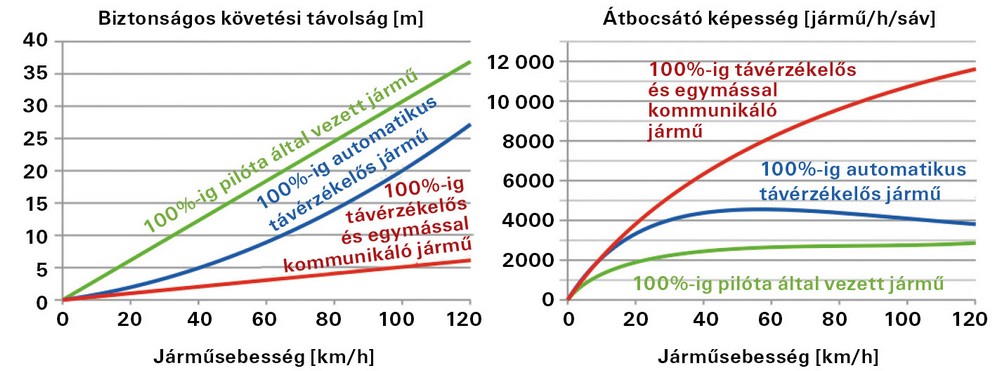
Az egymással kommunikáló robotjárművek akár 273 százalékig is megnövelhetik az autópályák átbocsátó képességét
Bár Harold barátomat nem tudom feltámasztani, de alighanem minden halottért tudok tenni valamit. Tudnak róla, hogy a közlekedési baleset a vezető halálok a fiatalok között? Tudatában vannak annak, hogy ezek közül az esetek közül szinte mindegyik emberi hibának és nem gépi meghibásodásnak tudható be, mégis gépekkel előzhető meg? Fel tudják fogni, hogy az autópályák befogadóképességét a két- vagy háromszorosára tudnánk növelni, ha a sávokat nem az emberi szem pontatlanságára támaszkodva követnénk, hanem egymáshoz közelebbi, kissé szűkebb sávban közlekednénk, és leszámolnánk az autópályák dugóival? Tudatában vannak annak, hogy naponta átlagosan 52 percet töltenek közlekedéssel, erre pazarolva a drága idejüket a napi ingázás során? Nos, az úton töltött időből 4 milliárd elpocsékolt óra és 9 millió liter benzin új technológiával ebben az országban is visszanyerhető. Nagyon várom már azt az időt, amikor egy nemzedék múlva visszatekintenek ránk, és azt mondják, milyen nevetséges is volt az, amikor az automatikus autóinkat még emberi erővel vezették. Köszönöm”.
Automatikus járműirányítás
Az automatikus, autonóm és robot fogalmakat azonos értelemben használjuk, a vezető nélküli járművek jellemzésére. A robot: a szláv nyelvekben kötelező ingyenmunkát jelent.
A robotjármű működtetése az érzékelt pályapozíciók és menetjellemzők folyamatos méréséből, azok céljellemzőkkel végzett összehasonlításából és a módosító beavatkozásokból áll. Beavatkozás a küszöbértéket meghaladó eltérés esetén szükséges. Ez közelebbről a gáz, a fék, a kormány, és a fokozatkapcsoló pillanatnyi értékének kiigazítását jelenti.
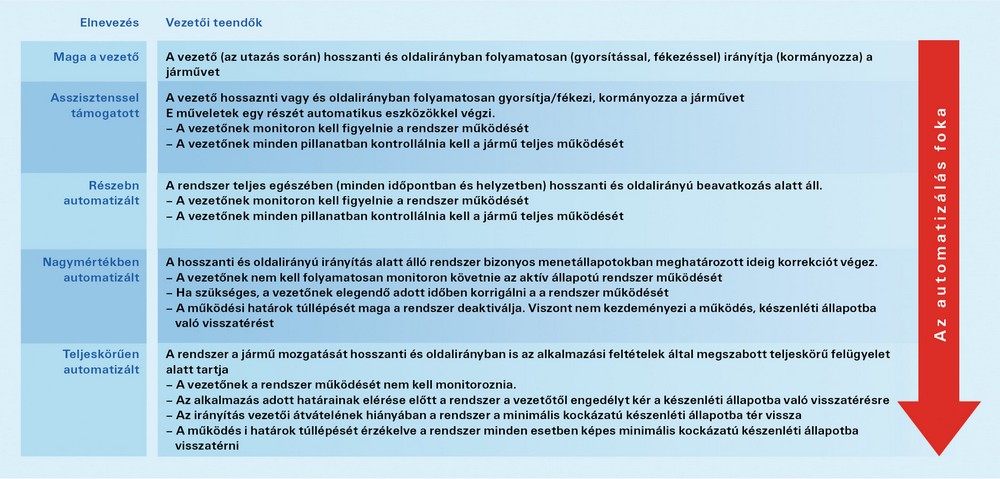
Autonóm gépkocsik vezetési feladatai, az automatizálás függvényében
A pálya földrajzi koordinátáit műholdas helymeghatározó rendszer, GPS adja meg. A GPS globális helymeghatározó rendszert jelent. A jeladó mesterséges holdakból, kiszolgálóeszközökből és vevőberendezésekből épül fel. Használata a Föld egész felületén és légterében lehetővé teszi a földrajzi hely koordinátáinak meghatározását, a Földhöz kötött koordinátarendszerben. Napjaink legismertebb rendszerei az amerikai GPS és az orosz GLONASS.
A GPS-jeleket vezérlőegység egyesíti, az érzékelt mozgásállapot jellemzőivel, és továbbítja azokat a rendszer központi feldolgozó egységéhez.
A vezérlőegység olyan programot működtet, amely fogadja a mért GPS-jeleket, csatolja a hozzájuk tartozó menetjellemzőket, és azokat adatátviteli csatornán keresztül az irányítóegységbe továbbítja. Az adatátvitelt rádiótelefonos összeköttetés végzi. Az irányító program digitális térképen azonosítja a mérési pontokat és a hozzájuk kapcsolódó mérési eredményeket.
A Google autó internetről programozható, vegyes üzemű járműrendszer, amely térképpel és referencia jelzőkészülékkel ellátott autonóm járművet foglal magába. Útvonalát GPS-szel azonosított koordinátapontok alkotják. E pontokat tehetetlenségi és videojelek módosítják. Információikat az útvonal síkjából kiemelkedő tárgyak, személyek vagy járművek kontúrjai adják, melyeket a jármű videó/lézer kamerák optikai és/vagy videotelefon jeleiként érzékelnek.

Az egy ülés szélességű gépkocsik a háromszorosára növelhetik az autópályák átbocsátó képességét. A bevásárlókocsikhoz hasonlóan egymásba tolható változataik a negyedére csökkenthetik a városi gépkocsik parkolásihely-igényét
Az útvonalon a járművet emberi vezető vagy automatikus jel indíthatja el, és állíthatja meg. A jármű útvonalkövetését számítógép felügyeli, és adott mértéket meghaladó eltérés esetén azt automatikusan a kívánt irányban módosítja. Az útvonalba eső parkolók információit (töltőoszlop, indukciós töltőtekercs vagy QR kódadó RFID jeleit), továbbá elfogadott védelmi rendszer biztonsági kódjait megkülönböztetett jelként kezeli.
A vezérlőrendszer a járművet menetoszlop irányító és követő tagjaként egyaránt működtetheti. Ennek során automatikus üzemmódban térkép- vagy GPS-jelekkel, vezetői üzemmódban internet útján (URL-jelekkel) vagy definiált tartalmú beszédinformáció állíthatja új pályára. A vezérlőrendszer adatbázisa mozgásérzékelők kis hatótávolságú kommunikációs NFC, Bluetooth, vagy más vezeték nélküli átvitel jeleinek kezelésére is alkalmas, szabadon hagyva a védett területet. Az adatkezelő rendszer személyi számítógépek, hordozható eszközök, mobiltelefonok, videojátékok, vagy GPS-készülékek processzoraival is kommunikációképes. A Google autó fejlesztői a járműirányítás valamennyi információs csatornán való elérhetőségére helyezték a hangsúlyt.
Amíg a Google 1 millió kilométernyi közúton próbálja járműveit, a VW Szilikon-völgyben működő elektronikai kutatólaboratóriuma a Stanford Egyetemmel közösen, egy Audi TTS irányítását automatizálta. Úgy, hogy a robotjármű a hírhedt Pikes Peak-en küzdjön meg a korlát nélküli szakadékokkal szegélyezett, 156 kanyarral tarkított, 1441 méteren át emelkedő útvonal érzékelésének és követésének problémájával. A tavaly augusztusban megtett, 27 perces menetidő ugyan majd háromszor több a fennálló rekordidőnél, a robotjárművek között viszont ez a rekord.
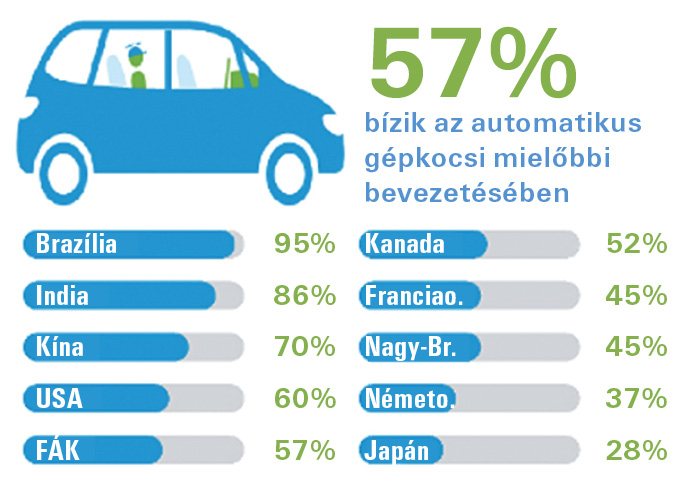
Idei, brit felmérési eredmények arról, hogy az egyes országok különböző mértékben tájékozott járművezetőinek hány százaléka utazna szívesen automatizált gépkocsin
Európában mérsékeltebb a robotautók iránti érdeklődés. Itt ugyanis tartanak az automatizálás vezetési élményt csökkentő hatásától. A folyamat azonban feltartóztathatatlan.
De zárják ezen írást Thurn professzor gyakran idézett sorai.
Ha majd a következő generációk visszatekintenek, nevetségesnek fogják tartani, hogy korábban az autókat emberek vezették, mint a kocsit húzó lovakat.
Ekkorra ugyanis az is történelem lesz, hogy az automatikus autókhoz képest az emberek milyen nyomasztóan rosszul tudtak vezetni.


