
BMW X3 és X5 összkerékhajtás
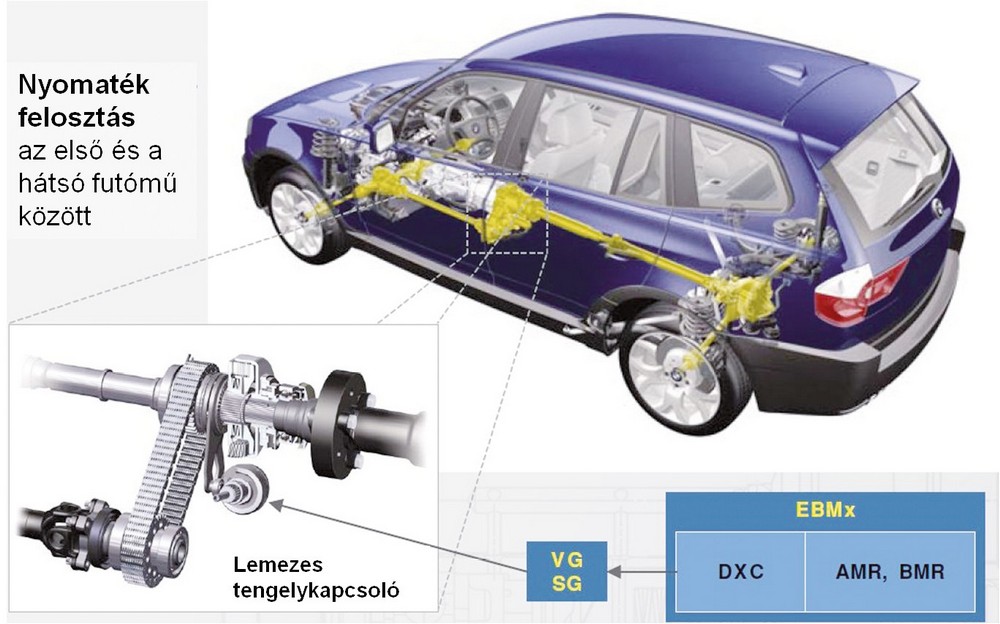
Az összkerékhajtás és a többi elektronikus rendszer együttműködése új lehetőségeket nyitott. 2004-ben vezették be az újfajta összkerékhajtást a BMW X3 és X5 típusoknál, melyet Xdrive-nak neveztek el. A vonóerő-kihasználtság és a menetstabilitás szempontjából optimalizálták, így a korábbi hajtásláncoknál előnyösebb.
A BMW 525 ix-nél megvalósított összkerékhajtás homlokkerekes differenciálművel és differenciálzárral
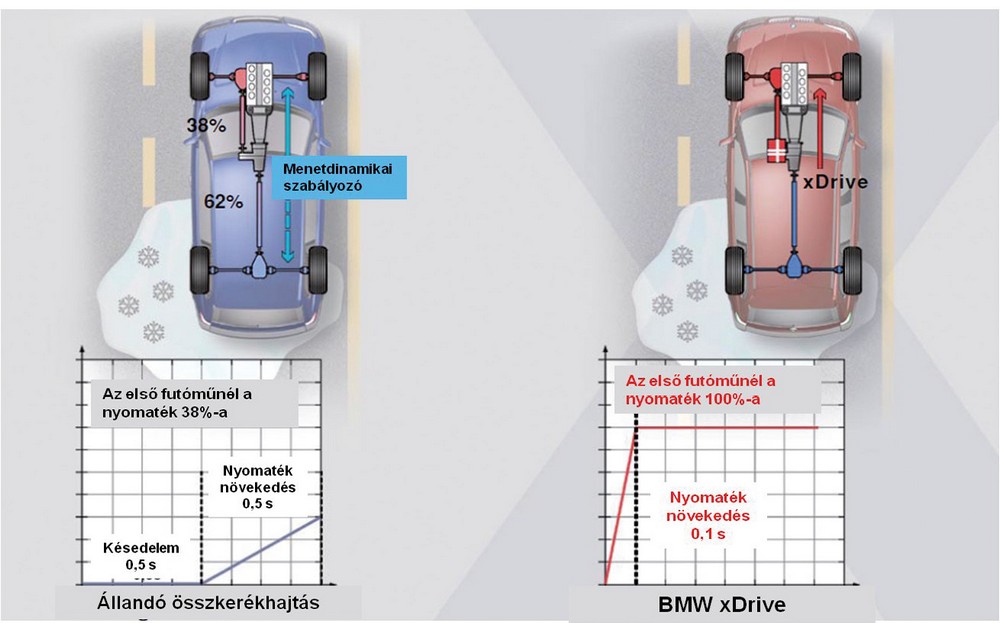
A BMW a korábbi 4WD modellváltozatainál olyan állandó összkerékhajtást valósított meg, melynél egy homlokkerekes, úgynevezett középső differenciálművel az első és a hátsó futóművek között 38% / 62% arányban osztotta szét a nyomatékot.
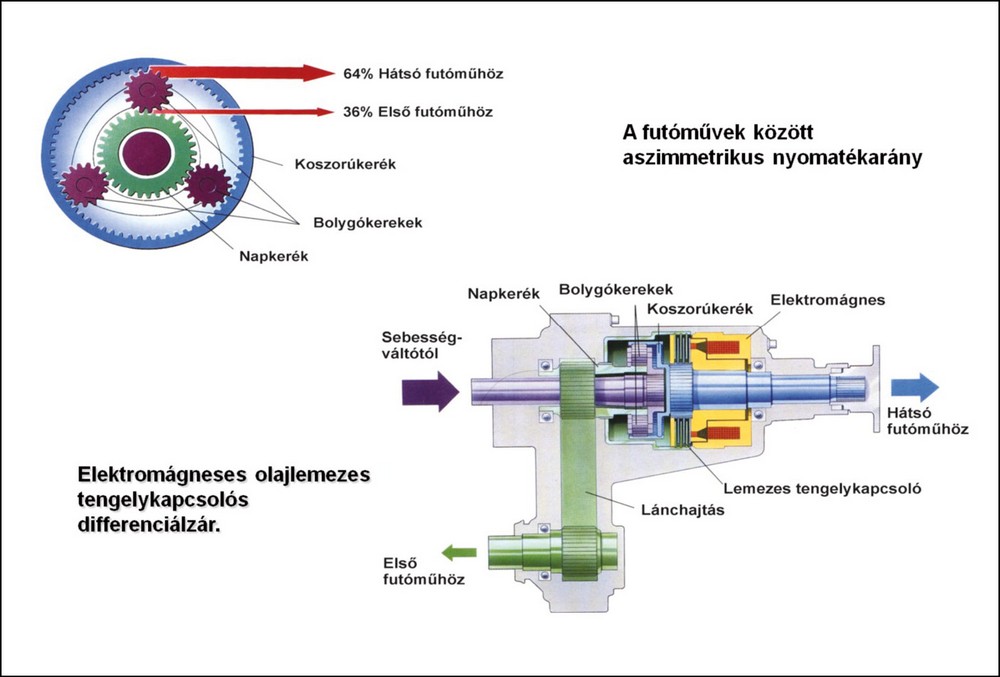
A BMW X3 és az X5 modelleknél szakítottak ezzel a hagyománnyal. Ezekbe a típusokba az átlagosnál nagyobb nyomatékú 6 hengeres motorokat szerelnek. Az X3 és az X5 esetében a műszaki jellemzők azonosak. Ezeknek a gépkocsiknak gyorsulásuk, végsebességük és így a menetteljesítményük is kimagasló. Ennek megfelelően egy új hajtásláncot fejlesztettek ki, melyet „Xdrive”-nak neveztek el. Ezzel változó nyomatékarányú összkerékhajtást valósítottak meg. Ennél is az osztómű központi főegység, de ebbe nem differenciálművet, hanem egy elektronikusan szabályozható működésű olajlemezes tengelykapcsolót szerelnek. Ez a négy kerék között optimális vonóerő-felosztást tesz lehetővé. A működtetését az elektronikus fékmenedzsment (EBMx) elektronikája szabályozza. Ez nemcsak a középső differenciálművet, hanem a differenciálzárat is helyettesíti.
BMW X3 és X5 összkerékhajtás
Ez az osztómű a hátsó kerekek felé közvetlenül adja a nyomatékot. Az első kerekek hajtása pedig több tárcsás, olajlemezes tengelykapcsolón keresztül fokozatmentesen, változó nyomatékkal, egy lánc segítségével valósul meg. A tengelykapcsolóba szerelt lemez egy része a házhoz külső fogazattal, a szomszédos lemezek pedig a tengelyhez belső fogazattal kapcsolódnak. Amikor menetdinamikailag szükségessé válik az első kerekek hajtása, a beavatkozóegység egyenáramú villanymotorja csigaáttételen keresztül emelőtárcsával mozgatott karokkal működteti a golyósoros emelőpályát. Ez hozza létre az axiális erőt, mely összeszorítja a tengelykapcsoló lemezeit. A működtetési módot kiváló dinamika jellemzi. Ezt mi sem példázza jobban, mint az, hogy az átvitt nyomatékot 200 Nm-ről 600 Nm-re 90 ms-on belül tudja növelni, méghozzá kis áramfelvétel mellett. A lemezek között létrejövő súrlódás viszi át a szükséges nyomatékot. Bizonyos menetállapotokban a lemezek között csúszás alakul ki, mely természetesen teljesítményveszteséggel, hőképződéssel és kopással jár. A hűtés feladatát a kenőolaj látja el és mérsékli a kopást is, továbbá elkerülhetővé teszi a kellemetlen zajhatást. A tengelykapcsoló működtetésénél az ébredő hőterhelést hőmérséklet-érzékelőkkel, illetve a működtetőelektronikánál matematikai modellel veszik figyelembe. Az olajellátást egy az osztóműbe szerelt szivattyú végzi. Így tehát a csupán hátsókerékhajtás és az összkerékhajtás között sokféle köztes nyomatékarány valósulhat meg. A tengelykapcsoló pontos működéséhez hozzájárul az a szoftverrész, mely a lemezek kopását kompenzálja. Ez a folyamatos távolságmérésen alapul, ami a kalibrációs program működését támogatja.
A BMW-nél alkalmazott elektronikus menetdinamikai szabályozórendszerek összehasonlítása
A gépkocsi elektronikus rendszerei
Közös elektronika működteti a DSC (Dynamischen Stabilitäts Control) és az Xdrive rendszert, mely kapcsolatban áll az EBMx (Elektronischen Bremsen Management) rendszerrel. Az elektronika teljesítőképessége lehetővé teszi a gépkocsiba beszerelt kerékcsúszás-szabályozó hidraulikus egység lehető legjobb kihasználását a fékezéssel kapcsolatos valamennyi beavatkozásnál. Továbbá az elektronikus rendszerek lehető legjobb együttműködése is megvalósult. További beállítási és beavatkozási lehetőségeket valósítottak meg a futóművek irányában. Ezek a fejlesztések lehetővé tették a menetdinamika összehangolt és a lehető legjobb befolyásolását. A széles körű integráció és az egyes rendszerek közötti valamennyi elképzelhető együttműködés egy olyan megoldást tesz lehetővé a gépkocsi stabilizálása területén, melynél a hossz- és a keresztirányú dinamikának van elsőbbsége.
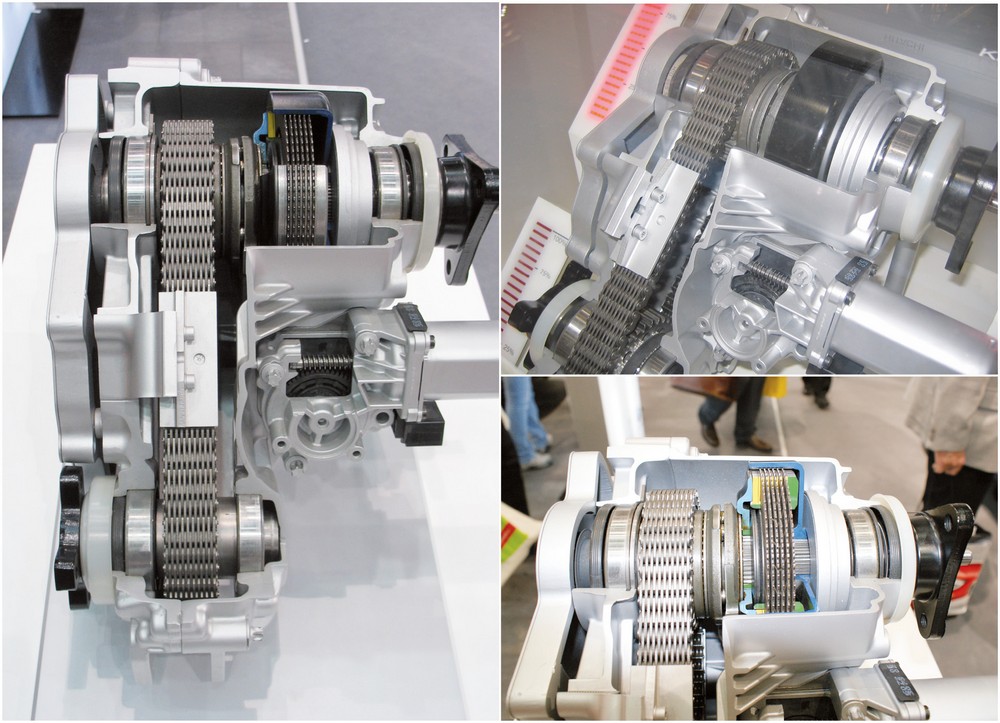
BMW X3 és X5 osztómű
Az Xdrive összetett beavatkozásokat valósít meg
Az útfelületen hirtelen bekövetkező tapadásitényező-változásokhoz is rugalmasan tud alkalmazkodni ez az elektronikus szabályozással ellátott rendszer. Ehhez csupán egyetlen másodpercre van szüksége. Akár a teljes nyomaték is átadható az első kerekekre, amennyiben az útfelület pillanatnyi tapadási viszonyai ezt teszik szükségessé. A differenciálzár hatást a kerekek egyedi fékezésével valósítja meg. A korábbi állandó nyomatékarányú és differenciálzárral ellátott hajtásláncnál a hajtónyomatéknak csupán 38%-a juthatott az első futóműre, és ez volt a maximum.
Az elektronikus rendszerek működésének összehangolása
A különböző hossz- és keresztirányú dinamikára ható szabályozásoknál a következő beavatkozási lehetőségek állnak rendelkezésre:
– a motor működésének befolyásolása, (nyomatékcsökkentés)
– az automatikus sebességváltó működésének befolyásolása (a fokozatkapcsolások gyorsasága),
– a kerekek egyedi fékezése,
– különböző nyomatékarányok megvalósítása az első és a hátsó futómű között,
– beavatkozások a futóműveknél (csillapítási tényező változtatása).
Ezeket a menetviszonyoknak megfelelően az EBMx elektronika logikai egységei aktiválják. Ehhez a fékezési beavatkozásokat aktiváló szoftvert egy kiegészítő struktúrával is ki kellett egészíteni. Ez már a futóművek felé is képes beavatkozási parancsokat kiadni.
A BMW-nél alkalmazott elektronikus menetdinamikai szabályozórendszerek
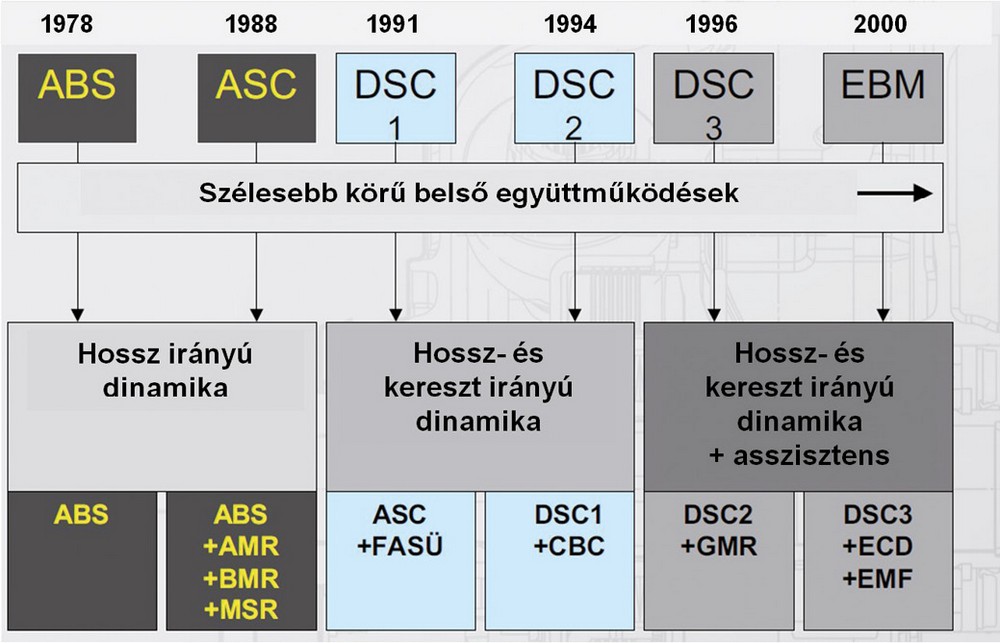
Talán nem felesleges, ha röviden áttekintjük a BMW-nél alkalmazott menetdinamikai szabályozórendszereket. Az alapfelszereltségéhez tartozott az ASC (Automatischen Stabilitäts Control), ennek része volt a blokkolásgátló. Azt a változatot, mely a fékezési beavatkozásokon kívül a motor működését is befolyásolni tudja, DSC (Dinamischen Stabilitäts Control) rendszernek nevezik.
A hagyományos 4WD és az xDrive összehasonlítása
A BMW 1991-től kezdte alkalmazni a DSC1 menetdinamikai szabályozórendszert. Ez egyrészt figyelembe veszi a vezető kívánságait, másrészt pedig a pillanatnyi menetdinamikai állapotnak megfelelően avatkozik be. Menet közben folyamatosan menetbiztonsági ellenőrzést végez.
Ennél a modellsorozatnál azt a gyors működésű, továbbfejlesztett ABS-rendszert alkalmazzák, mely már képes a gépkocsi hosszirányú dinamikáján kívül, egy kombinált hossz- és keresztirányú dinamika befolyásolására is.
A DSC2, vagyis a második generációs dinamikus stabilitásszabályozás már az ABS beavatkozási küszöbérték alatti kis kerékcsúszásoknál is, a pillanatnyi menetállapotnak megfelelően oldalanként különböző nagyságú fékerőket is ki tud vezérelni. Ezt nevezik az úgynevezett CBC (Cornering Brake Control) működésmódnak.
Az EMB (Elektronischen Bremsen Management) rendszer, melynek első sorozatbeépítése 2001-ben volt a 7-es BMW-be, már a fékezéssel kapcsolatos asszisztensműködések megvalósítására is képes. Továbbá a futóműrendszerekkel is az eddiginél is több kapcsolata van. Ezek az előzőekben ismertetett elektronikus működésmódok az (ECM) Elektronische Chassies Management rendszerben öltenek testet.
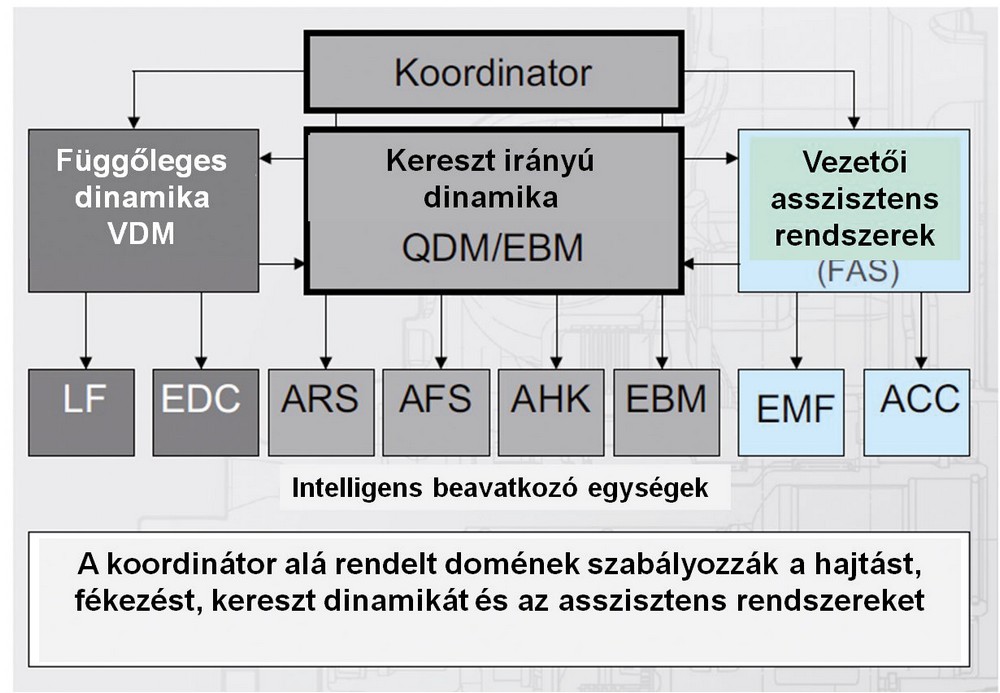
Az egyre több, a fékrendszerrel kapcsolatos szabályozások és a vezetőt támogató asszisztensrendszerek és az EBM miatt egy úgynevezett „koordinációs platform” megvalósítása vált szükségessé, mely a gépkocsi hossz- és keresztirányú menetdinamikáját, továbbá az asszisztensrendszereket felügyeli. Meghatározták az egyes beavatkozási lehetőségek határait is azért, hogy ne következhessenek be áttekinthetetlenné váló interferenciák az egyes beavatkozások között. Definiálták az egyes szabályozórendszerektől független koordinátori feladatot. Így nem fordulhat elő, hogy az elméletileg lehetséges teljesítménypotenciált csak korlátozott mértékben lehet kihasználni.
Az elektronikus rendszerek közötti integrációs lehetőségek:
Az előző áttekintés is példázza, hogy napjainkban a személygépkocsikba egyre több feladatot ellátó, különböző elektronikus rendszereket szerelnek be. Ezek hatékony együttműködése különböző módon valósulhat meg:
– Központi architektúra megvalósítása.
Ez a megoldás nem korlátozza az egyes, egymástól független rendszerek működését. A rendszerfelügyelet és a redundancia vonatkozásában nincsenek különleges elvárások. Ennél egy koordinátor határoz az egyes beavatkozások menetdinamikai ésszerűségéről. Ha a koordinátor meghibásodik, definiálni kell egy úgynevezett „visszakapcsolási szintet”. Ha egy menetdinamikai beavatkozóegység hibásodik meg, a továbbra is működőképes rendszerek kell, hogy megvalósítsanak egy menetdinamikailag nem veszélyes állapotot, ha lehet, átveszik a hibás egység feladatát.
– Doménarchitektúra megvalósítása. A menetdinamikai doménok lehetnek például azok, amelyek a hossz-, kereszt-, illetve a függőleges dinamikát befolyásolják. A teljes rendszerhez tartozó beavatkozókat a fő feladatuk alapján rendelik az egyes doménokhoz. Ugyanazt a beavatkozóegységet több domén is működtetheti. Például a függőleges dinamikai szabályozásnál egyenes menetben érkezhet parancs az aktív stabilizátor szétkapcsolására, vagy éppen a kocsiszekrény billenésének kiegyenlítésére is, amikor viszont szükség van a stabilizátorra. A keresztirányú dinamikai beavatkozásnál ugyanaz az eredmény érhető el például az első kerekek aktív elkormányzásával AFS (Active Front Steering) és az aktív hátsókerék-kormányzással AHK (Aktive Hinterachs Kinematik).
Hasonló a helyzet az asszisztensrendszerek beavatkozásainál is. A követési távolságot szabályozó tempomattal, vagy más néven az ACC-rendszerrel, ugyanaz az eredmény érhető el, mint az aktív elektromechanikus rögzítőfékkel EMF (Elektro-mechanische Feststellbremse). Ezek mindegyike hosszdinamikai beavatkozást végez, de különböző doménekhez tartozik. A doménarchitektúrán belül így tehát elengedhetetlen egy koordinátori feladat elvégzése. Erre a célra vagy egy újabb elektronikát kell beépíteni, vagy valamelyik domént ennek a feladatnak megfelelően kell kialakítani.
Végezetül pedig tekintsük át egy összetett elektronikus rendszer megítélésének fontos kritériumait:
– a teljes rendszer feltételek nélkül biztonságosan működtethető legyen,
– az elektronikák száma a lehetőségek szerint a lehető legjobban csökkenthető legyen.


