Automatikus tolatást segítő rendszer
A járműasszisztensi funkciók – mint biztonsági és komfortfunkciók már jelenleg is komoly mértékben kerülnek felhasználásra, a jövőben pedig ez még csak fokozódik. Az alkalmazást a wire technológia – a shift-by-wire és a steer-by-wire – felhasználhatósága is elősegíti.
Bevezetés
A repülőgépiparból ismert „by wire” technológia lényege, hogy a jármű fő kezelőszerveit (a C5 esetében ezek a kormánymű és a fékrendszer) összekötő mechanikus elemeket elektronikus összeköttetéssel váltják fel. A C5 by wire-ben a kormányon kapnak helyet a kormányzási, a fékezési és a gyorsítási funkciók kezelőszervei, ezért pedálok egyáltalán nincsenek. Ha a vezető a két kezét a volánon tartja, ujjaival könnyedén elérhet minden olyan gombot és kapcsolót, amely az autó vezetéséhez szükséges. Gázkarból például kettő is van, és a fék érzékelője is megtalálható a kormány mindkét oldalán. Az újfajta, karimájának alsó és felső ívétől megfosztott kormány teljesen új, változó áttételezésű, elektromos kormányzást vezérel, így kis sebességnél a kerekek már egészen csekély kormánymozdulatra is teljesen elfordulnak.
Ha ezeket a technológiákat még környezetfelismerő érzékelőkkel – ultrahang-érzékelők, videók vagy lézerszkennerek – is kiegészítik, akkor az automatikus menetfunkciók szenzorikus és aktorikus alapja már adott.
Általuk és a nagy teljesítőképességű szoftverekkel és számítógépekkel közösen lehetőség nyílik a vezető informálására, figyelmeztetésére és aktív támogatására. Egy különösen attraktív és a mindennapi használatra is alkalmas asszisztensi funkció az automata beparkolást segíti elő.
Ez kívánság szerint teljesen leveszi a sofőr válláról a beparkolás gyakran megterhelő feladatát. Kísérleti célból egy x-by-wire-rel (sebességváltó, fék/gyorsulás és kormányzás) ellátott járművet használtak. A szükséges környezetfelismerésre IR-lézer szkennereket alkalmaznak. A pozíciómeghatározás alapjaként a környezetszenzorika segítségével a környezetről egy megfelelő helyi térkép kerül felépítésre. Ide tartoznak a parkolóhelyek detekciói, a környező járművek és egyéb akadályok. Ezen információk segítségével lehet megtervezni a parkolóhely aktuális helyének pályáját.
Egy további lépcsőben a rendszernek képesnek kell lennie a járművet automatikusan a parkolóházba vezetni. Itt menet közben parkolóhelyeket keresnek (pl. rögzített keresőnyilak alapján), vagy bizonyos (konkrét) parkolóhelyeket direkt felkeresnek, hogy oda automatikusan beparkoljanak. Hogy az asszisztensrendszer navigációs pontosságát javítsák, a meglévő tudás alapján a környezetről (a parkolóház elektronikus térképéről) elérhetőnek kell lennie. A környezetről meglévő információk (falak, nyilak) és a térképinformációk összehasonlítása alapján szükséges a főként odometriára alapuló helyzetmeghatározás stabilizációja és javítása.
Az automatikus parkolás folyamata
Egy automatikus beparkolás folyamatát az alábbiak szerint lehet leírni. A sofőr először bekapcsolja a rendszert. Ezután ez elkezdi a megfelelő parkolóhelyet (hosszantit vagy keresztirányút) keresni, majd miután azt megtalálta, kéri a vezetőt, hogy álljon meg. A sofőr a rendszer ajánlataiból kiválasztja a számára megfelelőt és aktiválja a tulajdonképpeni beparkolási funkciót. A segítőrendszer megtervez egy ütközésmentes pályát a pillanatnyi helyszíntől a parkolási pozícióig, majd hosszanti és keresztirányúan szabályozva megteszi ezt az utat. Eközben a sofőrnek a műveletet egy ún. kiszolgálóelemmel (pl. gomb) folyamatosan felügyelni kell, így a folyamatot bármikor megszakíthatja. Ha akadályok, pl. gyalogos kerül a megtervezett útvonalra, akkor a jármű magától megáll. Ezt a folyamatot ábrázolja az 1. ábra.
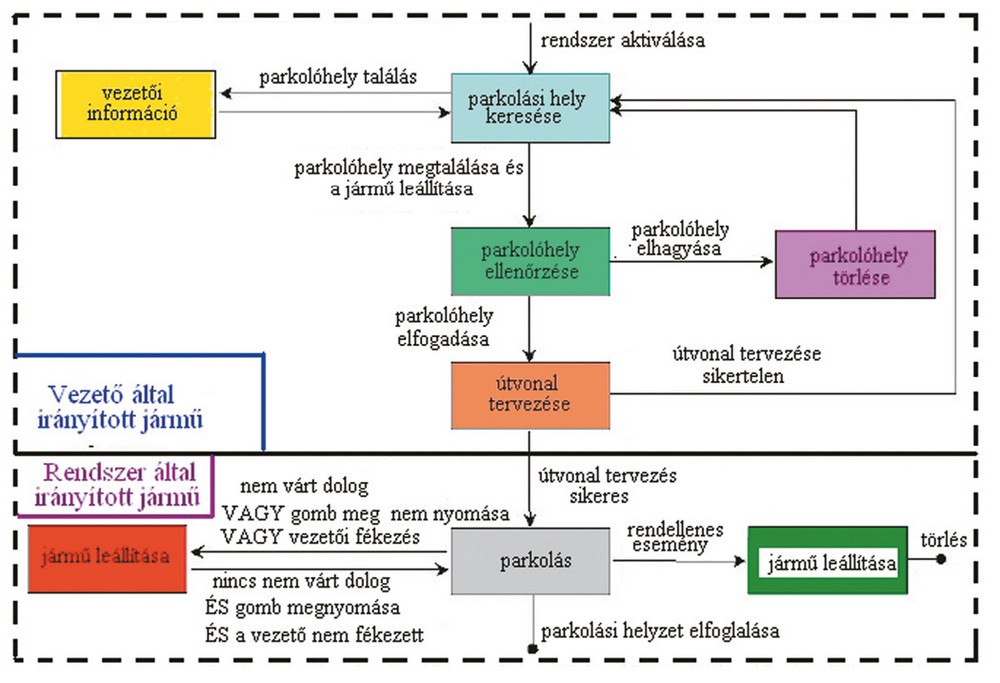
1. ábra
Az automatikus beparkolási folyamat részproblémái
Egy automatikus parkoló funkcióval ellátott asszisztensrendszer koncepcionális felépítése a már leírt folyamatokból épül fel. A környezetfelismerés a környezet reprezentálásának felépítését szolgálja. Minden jelentős tárgyat (mint a beparkolás folyamán előadódó potenciális akadályt) nyilvántartásba kell venni, ha lehetséges magasságuk és típusuk szerint, pl. áthajtható vagy nem áthajtható akadályok szerint csoportosítani és a helyi térképen, mint információkat elmenteni. A tárgyak belsőrendszerű reprezentációja, akár zárt polygonfolyamat formájában is történhet. Ehhez kapcsolódik még a szabad parkolóhelyek keresése és osztályozása is. Minden parkolóhelyhez legalább egy megfelelő parkpozíciót kell találni. Ahhoz, hogy a rendszernek a feladatmegoldáshoz szükséges megfelelő ismeretekről, a jármű környezetének felépítéséről egy helyi térkép formájában adatok álljanak rendelkezésre, egy pozíciómeghatározáshoz van szükség. A beparkoláshoz szükséges pálya kiszámítása a helyi térkép adataira támaszkodva lehetséges (2. ábra).
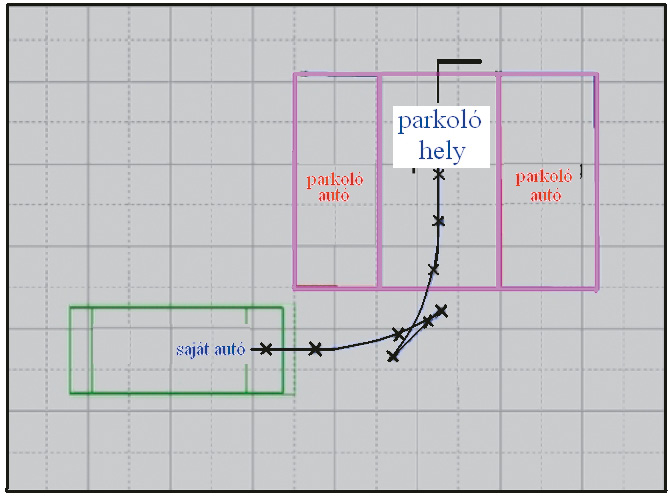
2. ábra
Ez a kiindulási pozíciótól a parkpozícióig vezet, és ütközésmentesnek kell lennie, valamint egy sor mellékfeltételnek is meg kell felelnie. Egy pálya ábrázolása egyszerű geometriai alakzatokkal, például egyenes vonalakkal és körívekkel egyszerű kiszámítást tesz lehetővé, és különösen kis parkolóhelyeknél alkalmazható, de álló helyzetű kormányzást is feltételez. A pályakanyarok – amelyek például polar-Spline-nal reprezentálhatók – előnye, hogy haladás közbeni kormányzást is lehetővé tesznek. Hátrányuk viszont, hogy a jármű számára szükséges oldalirányú elhelyezkedésnél hosszirányban több helyre van szükség. Ez egy behatárolt kormányzási sebességet eredményez.
A számítógéppel segített tervezésben (CAD) és a számítógépes grafikában spline-on szakaszosan parametrikus polinomokkal leírt görbét értünk (3. ábra). A spline-okat azért használják előszeretettel ezen a területen, mert egyszerű és interaktív szerkesztést tesznek lehetővé, pontosságuk, stabilitásuk és könnyű illeszthetőségük révén igen komplex formákat lehet velük jól közelíteni. A spline angol szó (kiejtése: szplájn), és nevét arról a rugalmasan hajlítható vonalzóról kapta, melyet hajóépítők és rajzolók használtak korábban.
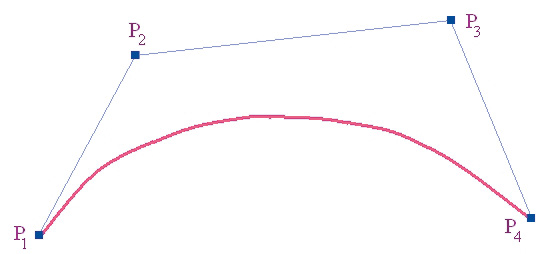
3. ábra
Ahhoz, hogy a kiszámított pályát meg lehessen tenni, a folyamatirányításnak van a legnagyobb értelme. Ez koordinálja az egész pálya egyes részeinek útvonalát és kiszámolja többek között a szabályozáshoz szükséges kitéréseket és nagyságukat. A megteendő útvonal ismeretében a keresztszabályozás ennél a szabályozótechnikai problémánál felosztható a kormányszeglet egy előirányítására és a kitérések eliminációjának szabályozására.
A hosszanti szabályozás a mindenkor előírt sebesség betartását szolgálja. Egy pályarész végén, ha kormányzási manőverrel kell megállni, garantálnia kell a lehető legnagyobb pontosságú megállást a távolságszabályozással. Ha a tervezett és a reális kormányzási pont között túl nagy a távolság, akkor hibák lépnek fel, amelyek szabályozással már nem egyenlíthetők ki. Ezáltal pozíció- vagy szöghiba alakul ki, amelynek következménye ütközés is lehet.
A vezető számára leginkább használható egy ún. „fölérendelt” folyamatszabályozás, amely közte és a tulajdonképpeni rendszer között közvetít, amely a végmeneteleket koordinálja és egyszerű biztonsági funkciókat is átvesz.
Működési példák
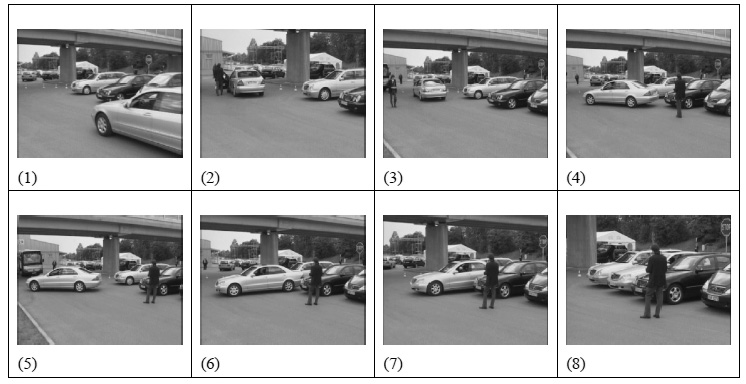
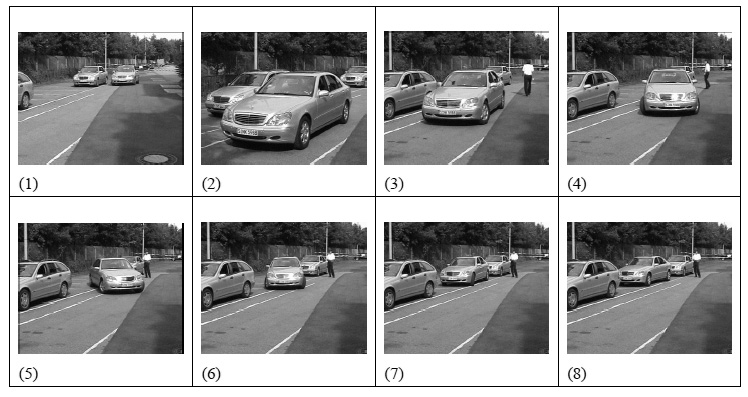
A gyakorlati kipróbáláshoz és tesztcélokhoz egy elektromos irányítású sebességváltóval, fékkel/gázzal és kormánnyal ellátott kísérleti jármű állt rendelkezésre. A környezet felismerése céljából két lézerszkennert erősítettek a jármű jobb oldalára. Az általa érzékelt sík a 4. ábrán látható. Az 5. és a 6. ábrán parkolási példasorozatok láthatók. A sofőr aktiválja a rendszert menet közben (5/1. és 6/1. ábra). Ha egy megfelelő nagyságú parkolóhelyet talált, azt megmutatja a vezetőnek és felszólítja megállásra (5/2. és 6/2. ábra). A sofőr megállítja a járművet és kiszáll. Kezében a távirányítóval csak egy gombot tart lenyomva (5/3. és 6/3. ábra), és a jármű hossz- és keresztszabályozva beáll a parkolóhelyre. A 6. ábrán egy útszegély mellé parkolás van ábrázolva. Itt a rendelkezésre álló parkolóhely viszonylag hosszú, ezért nem álló helyzetű az irányítás, hanem az folyamatos manőverezéssel történik. A 7. ábrán egy beállási manőver van kiemelve hosszirányú parkolóba, a 8. ábrán látható a kézi vezérlés keresztirányú parkolóba.
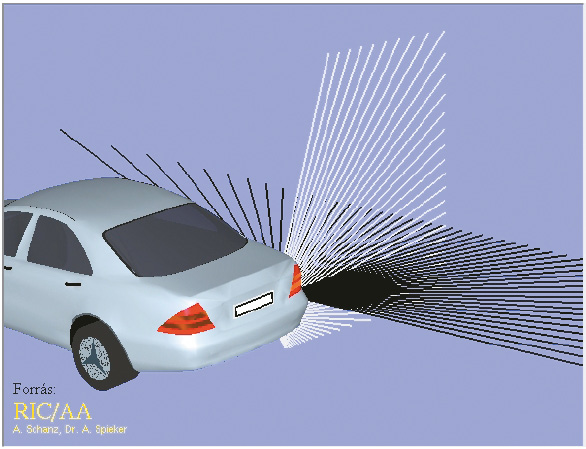
4. ábra
5. ábra
6. ábra
Forrás:
Alexander Schanr: Fahrerassistenz zum automatischen Parken - Reihe 12 Verkehrstechnik/Fahrzeugtechnik Nr. 607 2005.