Audi quattro Dynamic Torque Control – Elektromechanikus nyomatékvektorozás
A hajtásszabályozás a torque vectoring, jelentése: a hajtónyomaték célzott, dinamikus elosztása a hajtott kerekek között azért, hogy befolyásolja a jármű mozgását, főleg a kanyarodási viselkedést eltérő keréktalpponti tapadási viszonyok mellett. A torque vectoring elfordító nyomatékot (yaw) hoz létre a jármű függőleges tengelye körül az elfordulási elmozdulással vagy a kipördüléssel ellentétes irányban. Ez segíti a kanyarodást, csökkenti alulkormányzottságot vagy a túlkormányzottságot. Az első valódi torque vectoring funkciót és szerkezetet sorozatgyártásban a Mitsubishi Lancer Evolution IV modellnél alkalmaztak. A rendszer Active Yaw Control (AYC), működése aktív nyomatékelosztás a hátsó tengelyen; technológia megoldása: hidraulikusan vezérelt differenciálmű.

Az új Audi RS 5 modellben alkalmaznak sorozatgyártásban először quattro Dynamic Torque Control rendszert elektromechanikus nyomatékvektor-szabályozással a hátsó transaxle egységben.
Hátsó transaxle egység = a hátsó tengelyen elhelyezett, integrált hajtáslánc-modul, amely egyesíti az áttételt (váltót/reduktort) és a differenciálművet, gyakran kiegészítve villanymotorral és szabályozó rendszerekkel.
Menetdinamikai előnyök
A rendszer:
- növeli a vezetési biztonságot és teljesítményt,
- kanyarban a nagyobb tapadású kerékre irányítja a nyomatékot,
- megszünteti az alul- és túlkormányzottságot.
A jármű:
- gyorsabb irányváltásokra képes,
- pontosabb kormányreakciót ad,
- stabil marad dinamikus manőverek során.
Ez a világújdonságnak számító technológia „láthatatlan karmesterként” irányítja a keresztirányú nyomatékelosztást, milliszekundumok alatt változtatva a kerekek közötti nyomatékmegosztást, ezáltal agilis és stabil vezethetőséget biztosít a határon történő használat során is. Fékezés, kanyarba fordulás, majd gyorsítás a csúcspont után: az elektromechanikus nyomatékvektorozás különösen sportos vezetésnél érvényesül. A rendszer reakcióideje mindössze 15 ms.
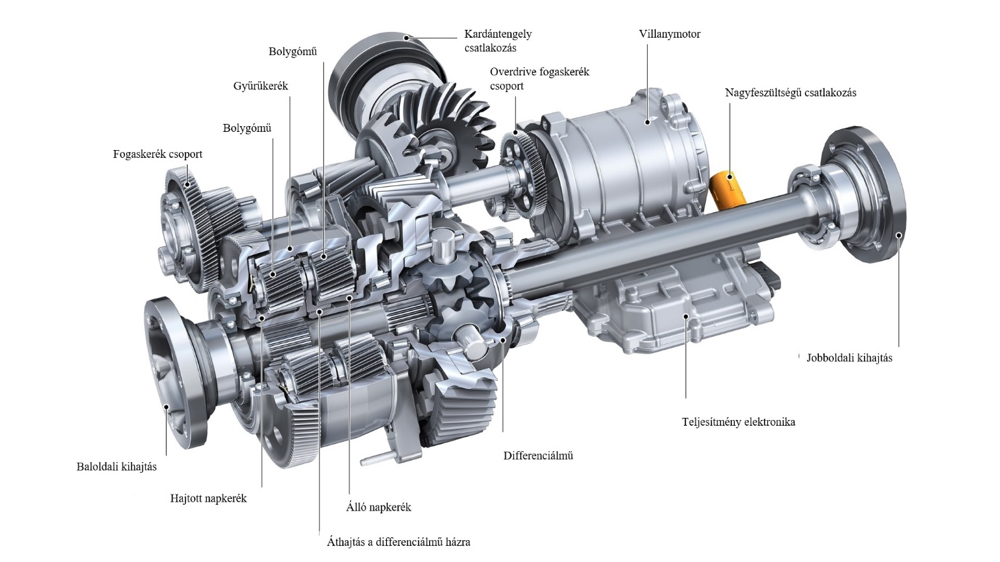
Az RS 5 számára egy teljesen új hátsó tengely készült. A rendszer fő elemei:
- vízhűtéses, állandó mágnesű villanymotor (400 V), teljesítmény: 8 kW, nyomaték: 40 Nm
- overdrive fogaskerekek,
- alacsony zárási fokú differenciálmű.
A villanymotor, mint nagyfeszültségű aktuátor működik. Az overdrive áttételek az aktuátor nyomatékát használják a kerékoldali nyomatékkülönbségek létrehozására. Ennek eredményeként a hátsó kerekek közötti nyomatékelosztás rendkívül gyors és pontos.
A rendszer a mechanikus megoldásokkal szemben:
- minden üzemi állapotban működik,
- nem függ a hajtási nyomatéktól,
- gázelvétel és fékezés alatt is aktív.
Az elektromechanikus nyomatékvektorozás:
- akár 2000 Nm nyomatékkülönbséget képes létrehozni
- 15 ms alatt reagál
- a bal és jobb féltengely között osztja el a nyomatékot
A nagyfeszültségű aktuátor (villanymotor) fogaskerekes és bolygóműves áttételeken keresztül kapcsolódik az összegző hajtóműre, a differenciálházhoz és a bal féltengelyhez.
Ha a nyomatékot a jobb oldalra kell irányítani, az aktuátor a differenciálművön keresztül „kerülő úton” juttatja át a nyomatékot.
Stabilizáló hatás
Túlkormányzottság esetén: a rendszer növeli a belső kerék nyomatékát
Alulkormányzottság esetén: csökkenti a belső (bal) kerék nyomatékát, a nyomaték a külső kerékre kerül.
A rendszer központi egysége HCP1 (High-Performance Computing Platform), feladata:
- hajtáslánc és futómű vezérlése
- járműállapot és környezeti adatok feldolgozása
- vezetői inputok (pl. kormányzás) értelmezése
A rendszer előrejelző módon működik, különbséget tesz pl. ellenkormányzás és kanyarindítás között.
Rendszerintegráció - együttműködő rendszerek:
- elektromechanikus nyomatékvektorozás (hátsó tengely)
- elektronikus differenciálzár (első tengely)
- fékalapú nyomatékvektorozás
- adaptív lengéscsillapítók
(Gyári sajtóanyag alapján összeállította Nagyszokolyai Iván)
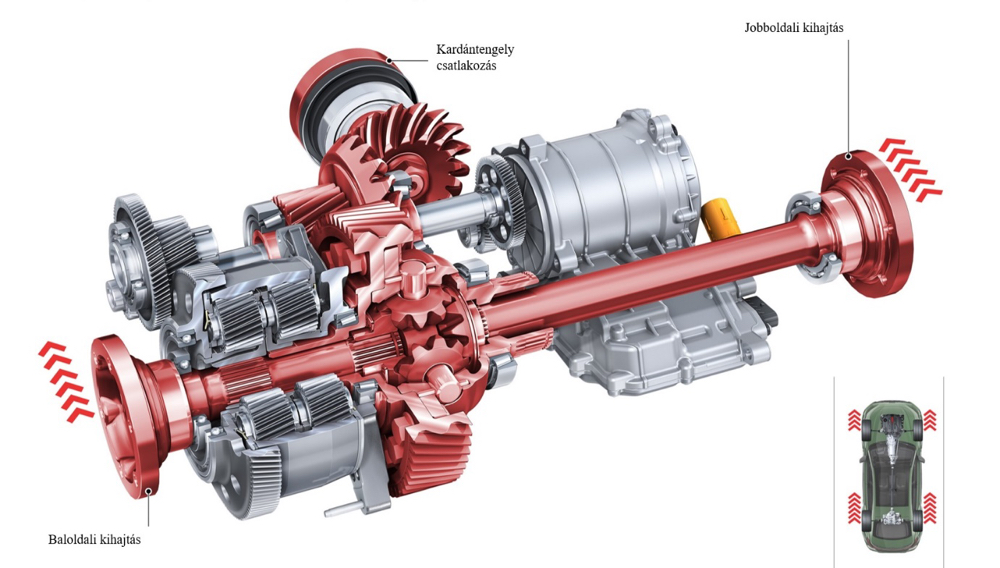
Egyenesmeneti nyomaték elosztás
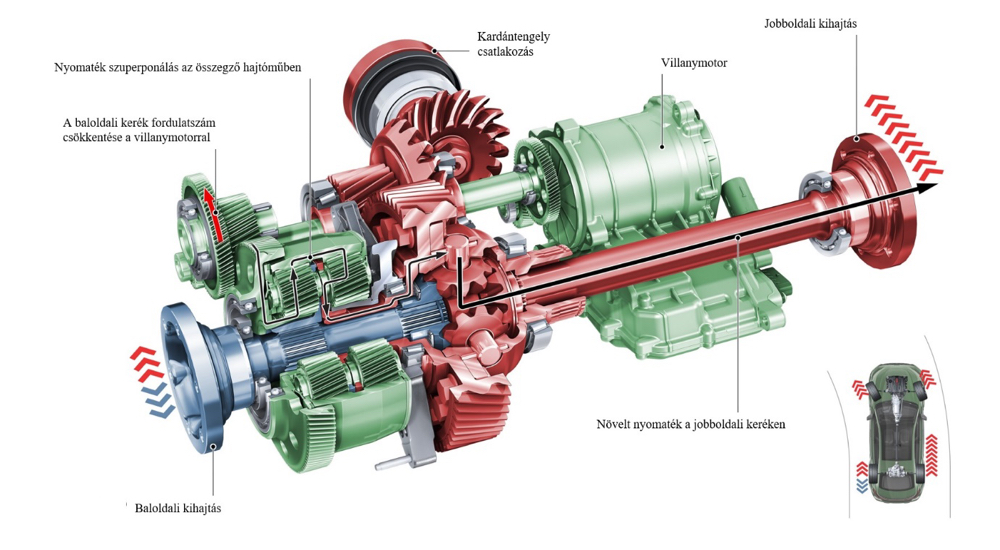
Jobboldali kerékre ható nyomaték növelése, baloldali kerék fordulatszám csökkentése
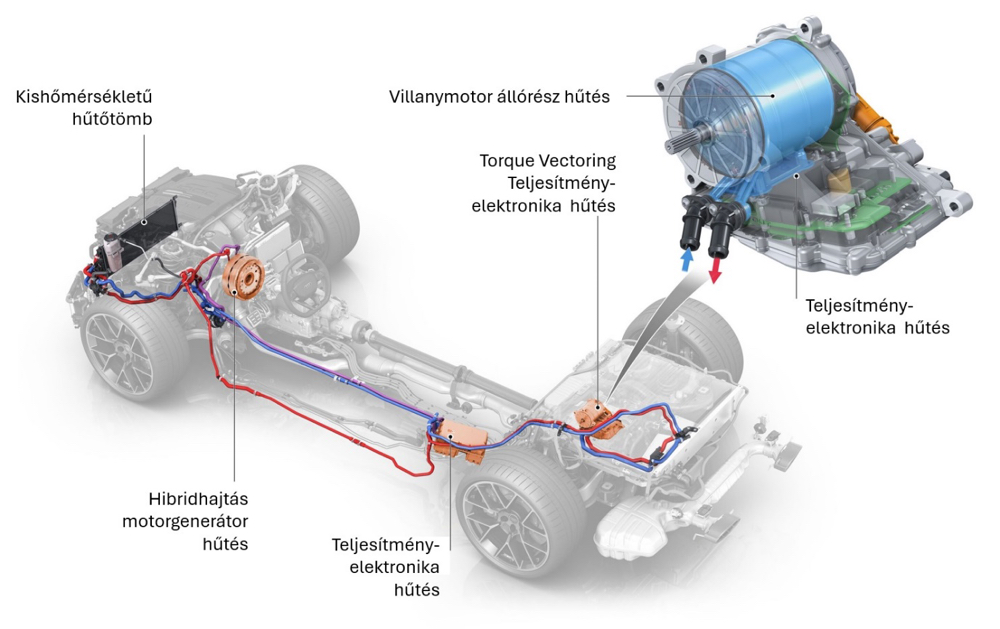
A nagyfeszültségű (400 V) szerkezeti elemek, így a hibridhajtás elemei és a torque vectoring villanymotor hűtőkörei