
Közvetlen, vektoros perdítőnyomaték-szabályozás
Honda SH-AWD
Matematikai és fizikatanulmányainkból tudjuk, hogy a vektormennyiségeket nagyságuk és irányuk együtt adja meg. Így van ez a kanyarodó járművet a függőleges tengelye körül elfordítani igyekvő perdítőnyomatékkal is. Ellennyomaték létrehozásával szabályozható a jármű alul-, ill. túlkormányzott viselkedése. A Honda által kínált megoldás alapelvét és szerkezeti megoldását ismerteti a cikk.
A perdítő ellennyomaték közvetlen, vektoros szabályozása (Direct Yaw Control Torque Vectoring) a stabilitás romlása nélkül, aktívan csökkenti a jármű alulkormányzott jellegét.
A közvetlen perdületszabályozás (DYC) ugyanannak a tengelynek a jobb és bal oldali kereke közti hajtónyomaték-felosztás irányításával jelentősen javítja a jármű dinamikáját, manőverezését. 1992-ben kezdte meg a Honda ennek a megoldásnak a kidolgozását összkerékhajtású járművön.
1996-ban bevezették a közvetlen perdületszabályozás elvére épülő „aktív nyomatékátviteli rendszer”-t (ATTS), mely egy elsőkerék-hajtású autó bal és jobb oldala között szabályozta a hajtónyomaték felosztását.
2004-ben a Honda kifejlesztette a „közvetlen perdületszabályozású összkerékhajtás”-t (DYC AWD). Ezt a rendszert SH-AWD, vagyis „Szuper kezes összkerékhajtás” néven gyártják és a Honda Legend (Acura RL) típusokba építik be.
A „vektoros nyomatékszabályozás” aktívan szabályozza a hajtónyomaték felosztását, a vonóerő-kihasználás és a jármű dinamikusabb viselkedése érdekében.
A Honda „közvetlen, vektoros perdítőnyomaték-szabályozás”-nak nevezi azt a rendszerét, mely a bal és jobb oldali hajtott kerék, valamint az első és hátsó tengely közti nyomatékfelosztás szabályozásával éri el a fenti célt.
Vektoros nyomatékszabályozás hosszirányban
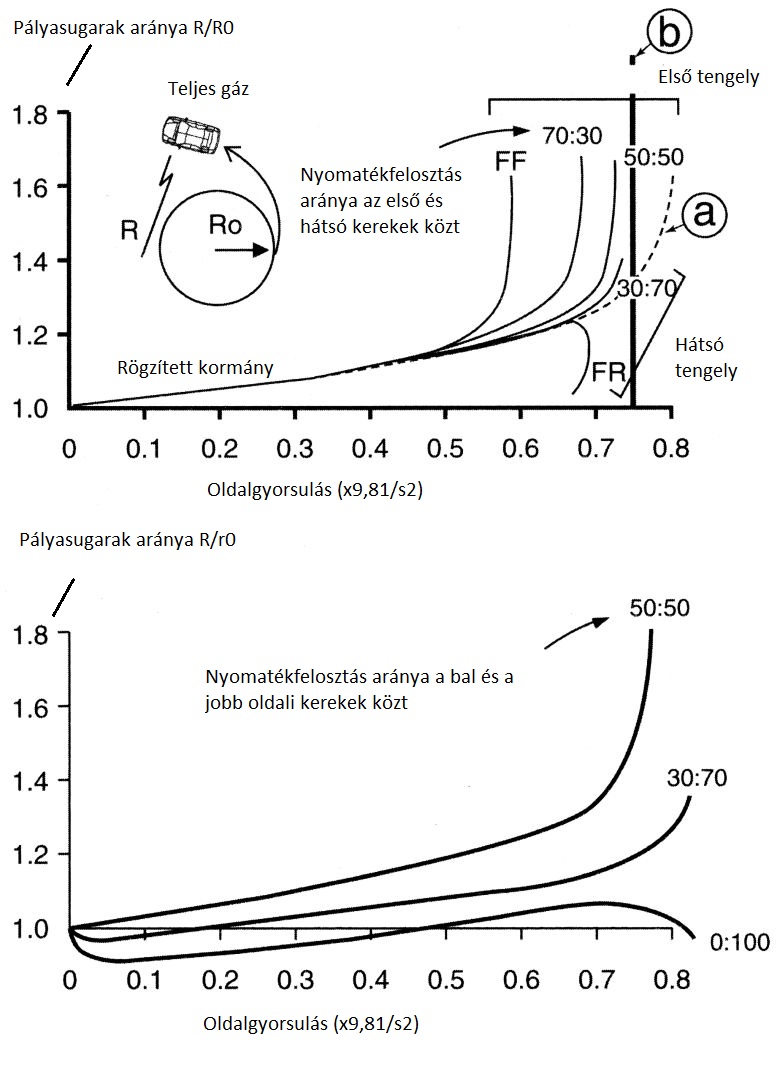
Egy összkerékhajtású jármű első és hátsó tengelye közti nyomatékelosztás lényeges hatással van a jármű irányíthatóságára ívmeneti gyorsításkor (1/a ábra). Ha a hátsó tengelyre jut nagyobb nyomaték, akkor csökken az alulkormányzottság. Ha azonban a hátra irányított nyomaték aránya eléri, ill. meghaladja a 70%-ot, akkor már ellentétes kormányzásra lesz szükség (ahol a görbe vége hirtelen lefelé fordul).
1/a 1/b ábra
Ezek szerint lehetséges a kanyarban gyorsító jármű első és hátsó tengelye közti nyomatékarány változtatásával szabályozni a kanyarodási tulajdonságokat. Bárhogyan is osztjuk el a nyomatékot a két tengely között, a kanyarodási határsebesség közelében már nem érünk el jelentős oldalgyorsulás-növekedést; a kanyarodási jellemzőkre pedig még állandó sebesség mellett is hatással van a nyomaték felosztása. (L: „a” görbe az 1/a ábrán.) Ezt nevezhetjük a hosszirányú nyomatékelosztás határának összkerékhajtású járműveknél. (L: „b” határvonal az 1/a ábrán.)
Közvetlen, vektoros perdítőnyomaték-szabályozás
Ennek a szabályozási módnak a fejlesztésekor az előző bekezdésben leírt hosszirányú nyomatékfelosztással elérhető kanyarodási tulajdonságok meghaladása volt a tervezők célja. A hajtónyomaték elosztása itt már nemcsak a két tengely között, hanem a hátsó tengely bal és jobb kereke között is megvalósul, szabályozva ezzel a járműre ható perdítőnyomatékot. Kanyarban gyorsításkor a dinamikus átterhelődés nemcsak a bal és a jobb oldal, hanem egyidejűleg az első és a hátsó tengely között is létrejön. Ennek eredményeként pl. bal kanyarban a jobb hátsó kerékre jutó talperő nő meg a legnagyobb arányban, így ezen a keréken lehet a legnagyobb arányú hajtónyomaték-növekedést megengedni. (Nyilván abból a nyomatékból lehet ide juttatni, amit máshonnan elveszünk.)
A két oldal közötti megosztás alkalmazható összkerékhajtáson kívül első- és hátsókerék-hajtásnál is. A bal és jobb oldali hajtónyomaték arányának változtatása nemcsak az alul-, ill. túlkormányzott jelleget befolyásolja, hanem megfelelő arány esetén az oldalirányú gyorsulást is növeli a kanyarodási határsebességnél. (L: az 1/b ábrát.) A mérési eredmények szerint a hajtónyomaték oldalirányú elosztásának szabályozása jelentősen javítja kanyarban a menetteljesítményeket, és azok módosítására is lehetőséget teremt. Ennek logikai szabályozása a jármű fizikai mozgásjellemzőin alapul, a „β-módszer” cím alatt leírtak szerint.
Kvázi-állandósult állapotban az oldal- és hosszirányú gyorsulás arányos szabályozása hatékony eszköz a perdítőnyomaték szabályozására kanyarban gyorsításkor, ill. lassításkor.
A „β-módszer”
Szemlélhetjük úgy a kanyarodó járművet, mintha haladási iránya egy, a tömegközéppontban felrajzolható β oldalkúszási szöggel térne el a vezető szándéka szerinti ívtől (azaz annak pillanatnyi érintőjétől).
2. ábra
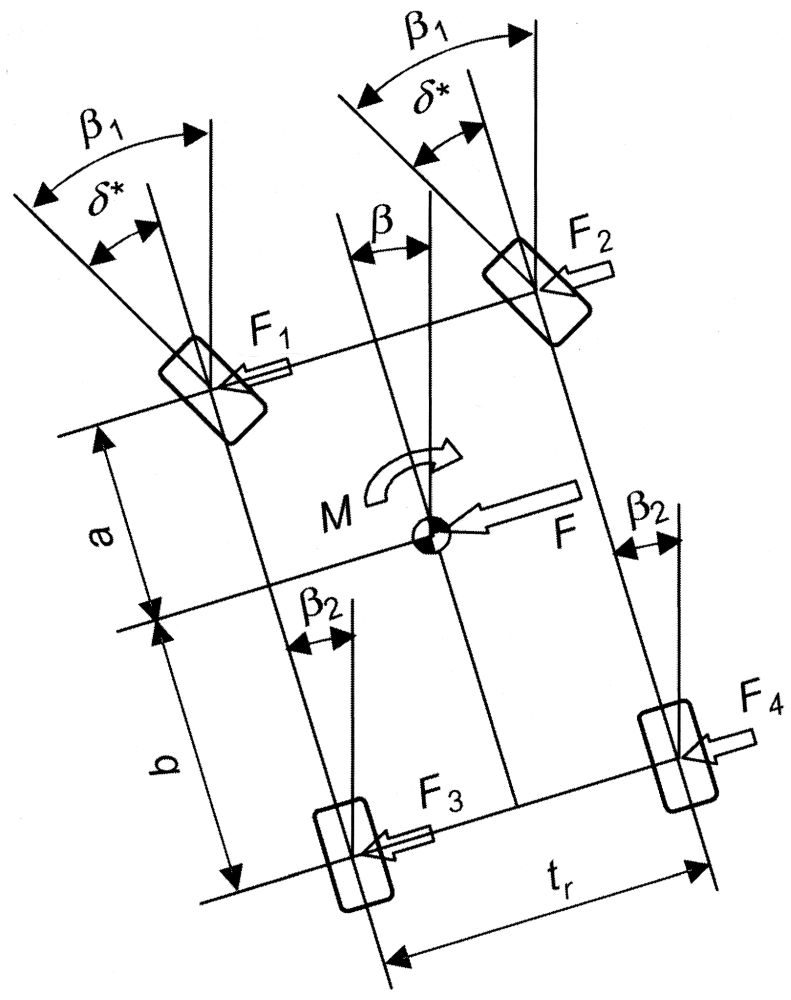
Ezt a β szöget tekintik paraméternek a járműre ható perdítőnyomaték kiértékelésekor. Ez a módszer jól használható a jármű mozgásának és reakcióinak leírására, a most bemutatott rendszer működése is ez alapján szabályozott. A jármű tömegközéppontjára redukált eredő perdítőnyomatékot az oldalirányú és perdítő hatású erők keltik (L: 2. ábra). Az ezt ellensúlyozó stabilizáló perdítőnyomatékot a következő egyenlet fejezi ki:
M= -a*Ff + b*Fr + (M1+M2+M3+M4),
ahol:
Ff=F1+F2: az első, ill.
Fr=F3+F4: a hátsó tengelyre ható oldalvezető erő,
M1…M4: visszatérítő nyomatékok a négy keréken.
Az ábrán az első kerekek oldalkúszási szöge β1, elkormányzási szögük δ, a hátsók oldalkúszása β2.
Ha az ábrázolt balra kanyarodás esetét vesszük, akkor kvázi-állandósult állapotban a jármű mozgásállapota jól leírható β1 és β2 valamilyen kombinációjával. A jármű mozgásának jellemzői állandósult és átmeneti állapotban is meghatározhatók a stabilizáló perdítőnyomaték alapján, paraméternek tekintve β (járműoldalkúszás) és δ (elkormányzási szög) aktuális értékét.
A vizsgálat további részletezése nélkül is látható, hogy a fenti szögek és nyomatékok határozzák meg a jármű pillanatnyi viselkedését, tehát ezek szabályozásával előállítható a lendületes, de még biztonságos kanyarodási jelleg.
Az SH-AWD rendszer felépítése és működése
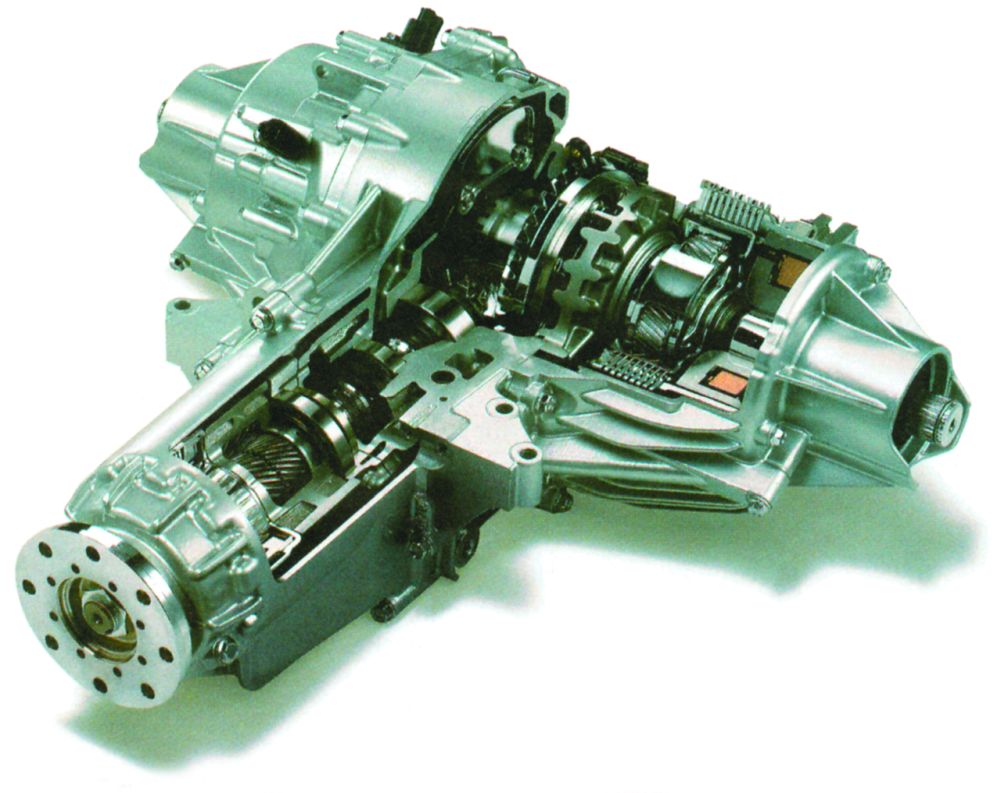
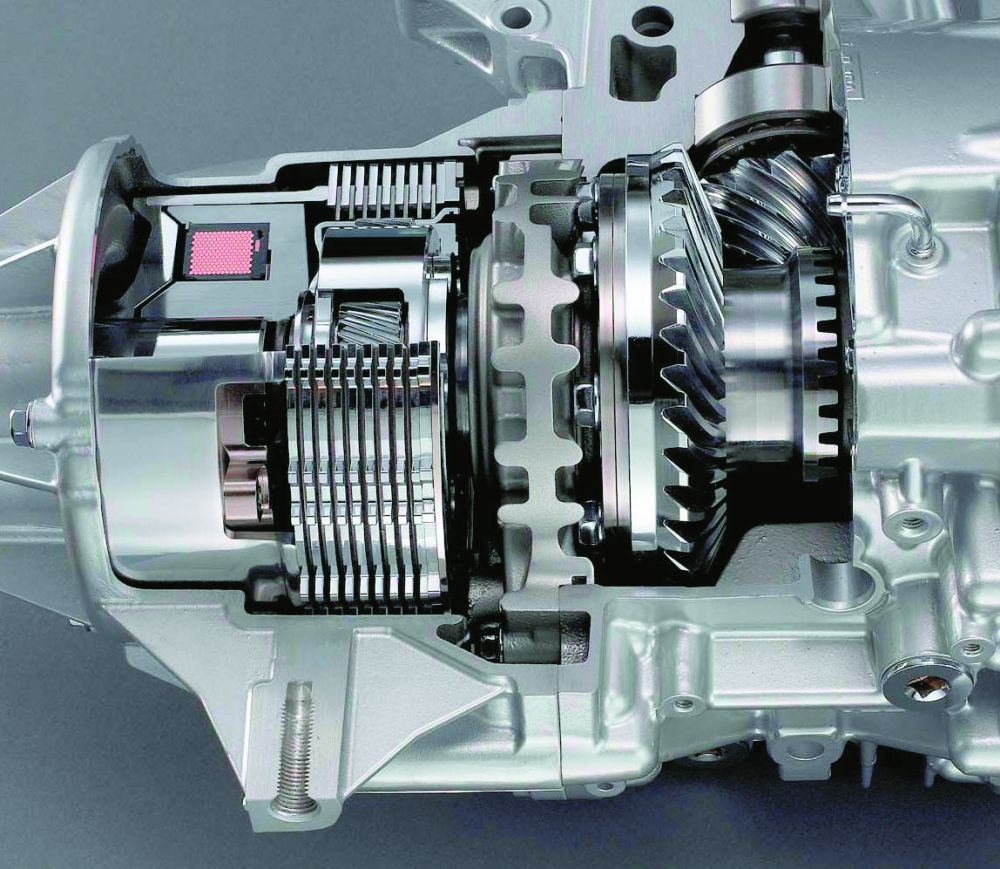
A rendszer elemeit a 3. ábra mutatja. A rendszer újdonsága a hátsó differenciálmű szerkezete, melynek metszete a címképen, működési elve pedig a szerkezeti rajzon (4. ábra LZ-tól) tanulmányozható. Ezen végigkövethetjük a hajtónyomaték útját a kardántengelytől a két féltengely felé.
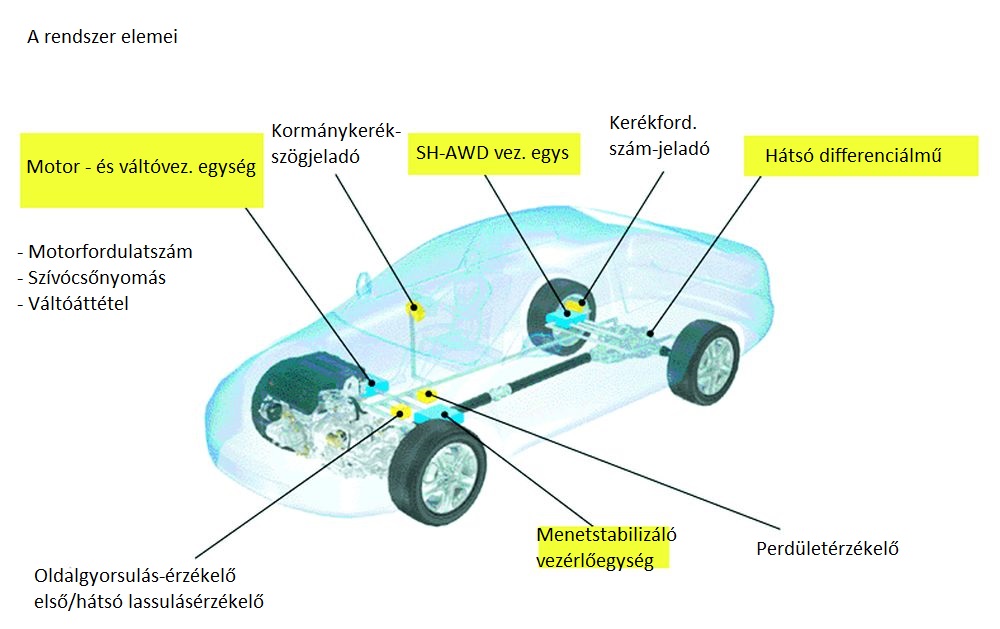
3. ábra
Fő részei a következők: bolygóműves gyorsító előtét (1 direkt (1) + 1 gyorsító (2) fokozat), mely a differenciálműbe bemenő fordulatszámot növelheti; olajszivattyú; hipoid fogazatú kúp-tányérkerék pár mint haránthajtómű; bal és jobb oldali bolygómű, elektromágnessel működtetett lamellás tengelykapcsolóval (B és J).
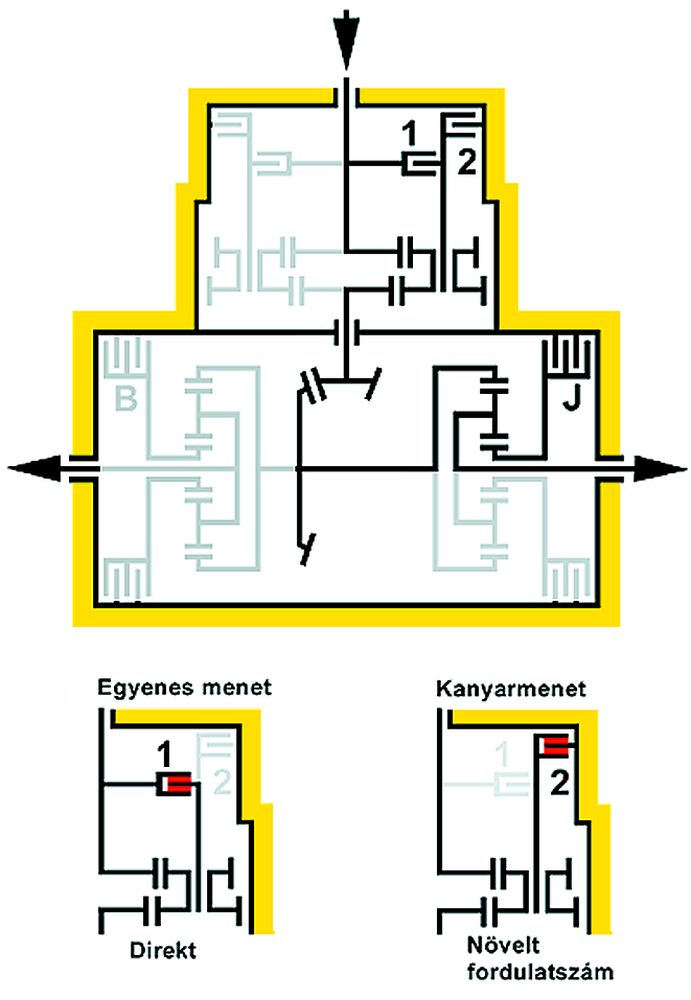
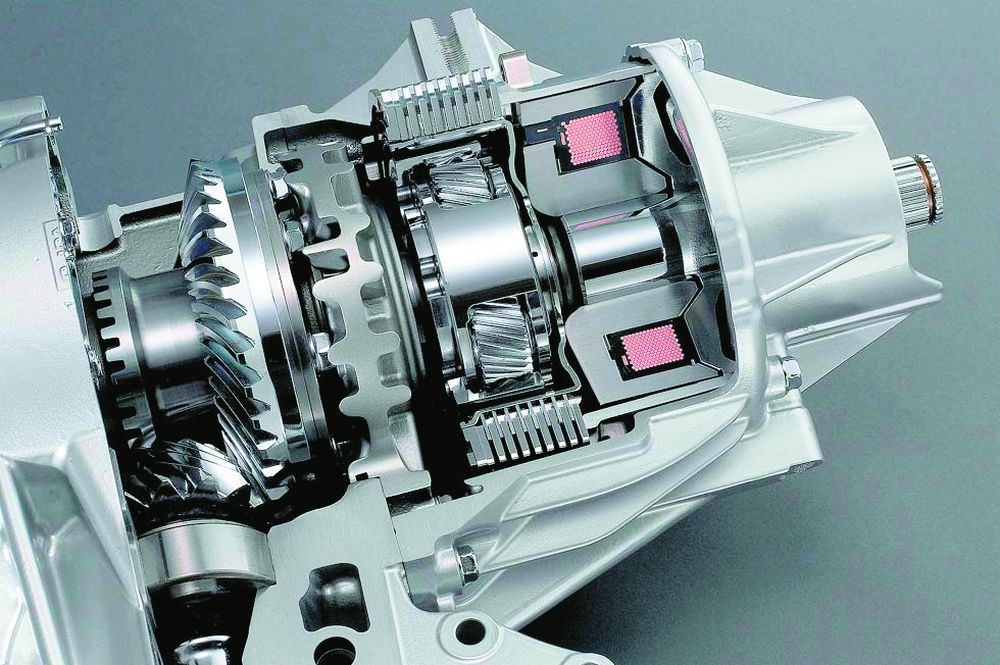
4. ábra
Ezek a direkt elektromágneses kuplungok nagyon pontosan osztják el a hajtónyomatékot a két oldali kerék között. Elektromágneses térerősségüket egy-egy mérőtekercs érzékeli, így kiegyenlíthető a kuplung hézagaiból adódó erőingadozás (5. ábra).
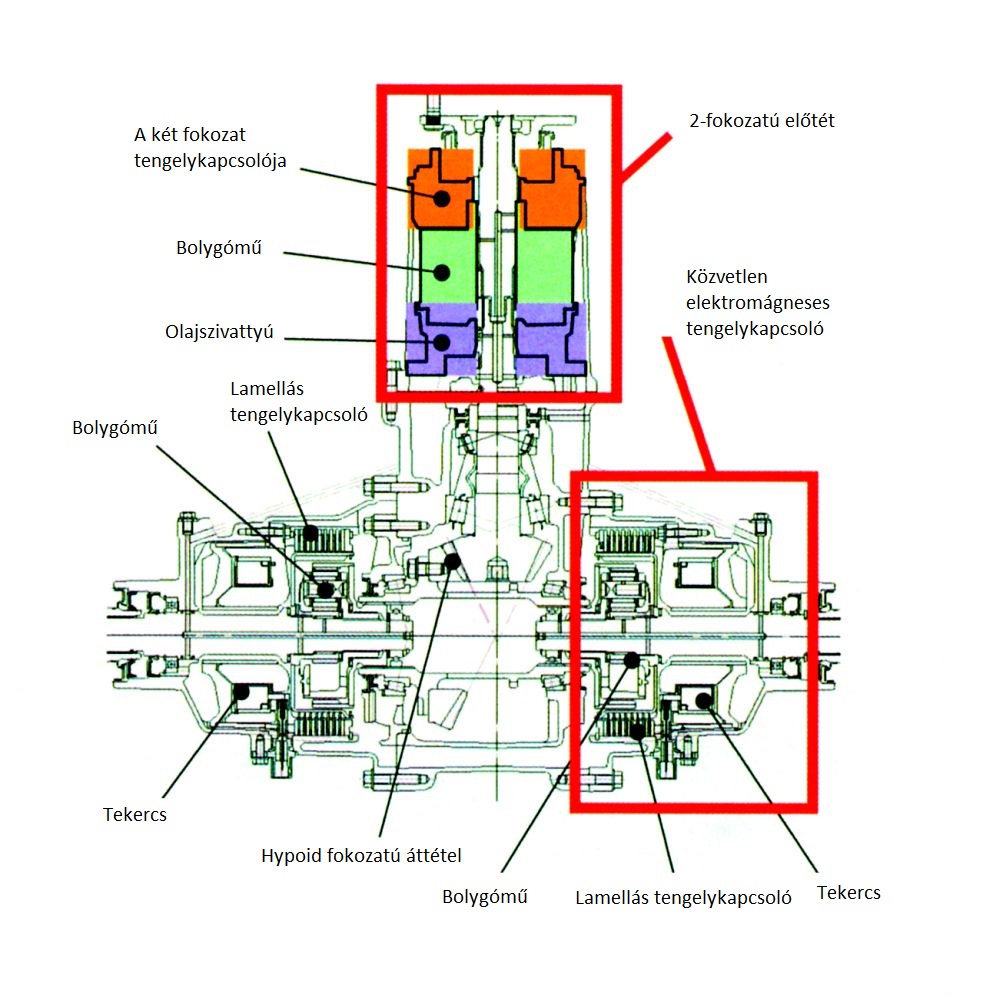
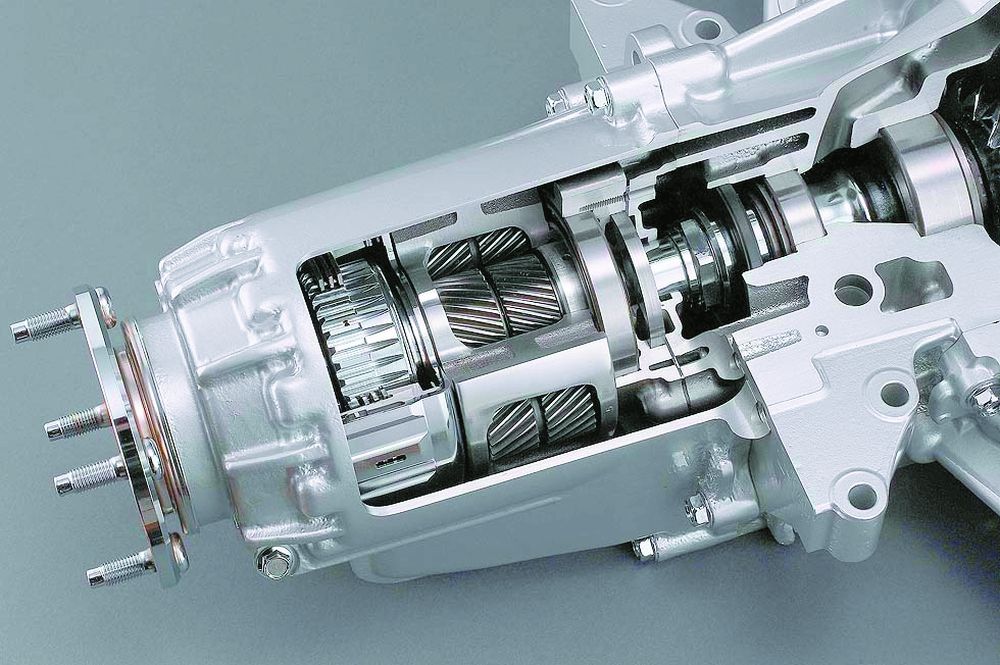
5. ábra
Ha a vezérlés a jobb oldali tengelykapcsolót csúsztatja vagy zárja, akkor a bal hátsó kerékre jut nagyobb nyomaték; ha fordítva, akkor pedig a jobb hátsóra. A működésnek ez a része a Mitsubishi aktív perdületszabályozására hasonlít. Ha a gyorsító előtét tengelykapcsolóit működteti, akkor több nyomaték jut a hátsó tengelyre. Így a rendszer szabályozni tudja a hajtónyomaték felosztását a két oldal és az első és hátsó tengely között is.
Az SH-AWD logikai szabályozása pozitív visszacsatolású, ami nagy pontosságot és igen rövid válaszidőt követel a szabályozási kör elemeitől (6. ábra).
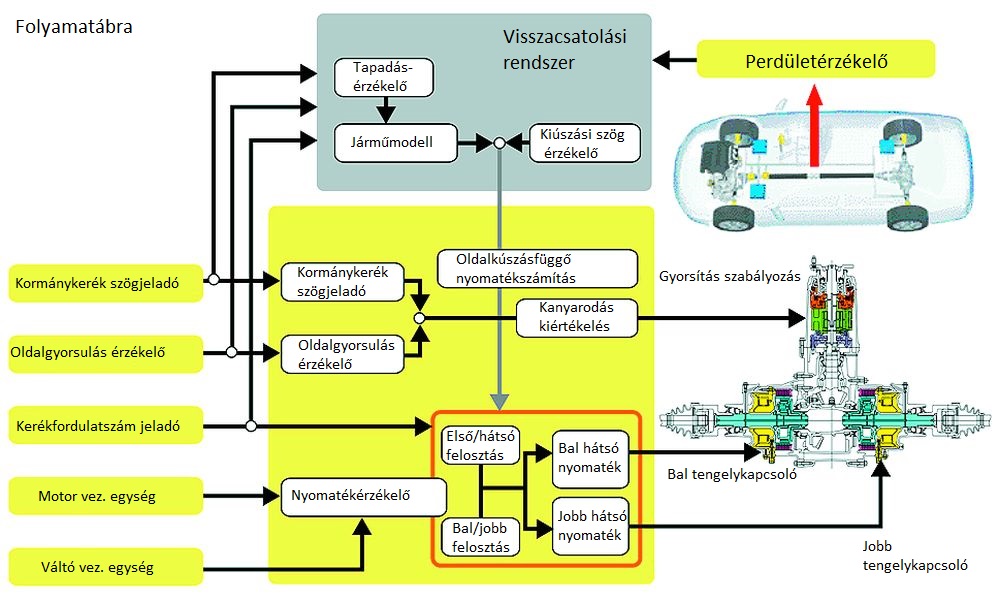
6. ábra
Az SH-AWD-vel felszerelt Honda Legend (Acura RL) motorjának nyomatéka alaphelyzetben 70%-ban az első, 30%-ban a hátsó kerekeket hajtja. Gyorsítás vagy fékezés közben akár meg is fordulhat ez az arány a hátsó tengely javára, hogy jobban kihasználható legyen a tapadás. Kanyarban gyorsításkor az alulkormányzottság csökkentésére több nyomatékot oszt a rendszer a külső hátsó kerékre. Szélsőséges esetben akár a nyomaték 70%-a is juthat ide, míg a belső hátsó kerékre 0%, az első tengelyre pedig a maradék 30% jut. Kanyarban fékezéskor pedig a túlkormányzottság csökkentésére több motorféknyomatékot juttat a belső hátsó kerékre.
Hogyan teljesít valós járműben?
- A közvetlen, vektoros perdítőnyomaték- szabályozás normál és extrém – a fizikai határokhoz közeli – autózási feltételek között is lehetővé teszi a járműre ható perdítőnyomaték kordában tartását.
- A bal és a jobb oldali kerék közti nyomatékfelosztásnak az oldalirányú gyorsulástól függő irányítása megfelel az aktuális kerékterheléseknek. Ez javítja az oldalvezető erőknek és a gumiabroncsok teljesítőképességének kihasználását.
- A járműre ható perdítőnyomaték szabályozása megváltoztatja az első és a hátsó futómű kifelé kúszását okozó erők egyensúlyát, így csökkentve az alulkormányzott jelleget.
Összefoglalás
A közvetlen, vektoros perdítőnyomaték- szabályozással elérhető jelentős javulás hátterében álló alapelvek megerősítést nyertek. Kifejlesztettek egy egészen eredeti, ún. „béta-módszert”, mellyel az oldalkúszási szög alapján értékelhető a jármű mozgásállapota. A „béta-módszer” alapján alkották meg az új hajtásrendszer logikai szabályozását is.
lók és kétfokozatú gyorsító előtét segítségével valósítja meg a közvetlen, vektoros perdítőnyomaték-szabályozást.
Ez a fejlesztés lehetővé tette az alulkormányzottság aktív csökkentését anélkül, hogy a jármű stabilitásának rovására ment volna. Ezzel függ össze a másik
A hagyományos összkerékhajtással szemben itt a jármű stabilitását és manőverezhetőségét a tervezők nemcsak csúszós úton és terepen, hanem mindenféle útfelületen javítani kívánták.
Előnyeivel szemben a következő hátrányok állnak: a vezető nem tudja kikapcsolni; egyes becslések szerint 30%-kal drágítja meg az összkerékhajtási rendszert.
Forrás:
– Y. Shibahata – T. Tomari: Direct Yaw Control Torque Vectoring, Auto Technology 2006/3. szám, pp. 34-37.
– www.auto.bme.hu
– www.world.honda.com/news/2004/c041117.html
– www.autozine.org/technical_school/traction/tech_traction_4wd_21.htm
– A Growing Bias for „Torque Vectoring”, autotech daily 2005.máj.9., pp2.
– J. Mortimer: Torque vectoring for Improved vehicle Dynamics and Responsiveness, Auto Technology 2002/1. szám, pp. 30–32.


