
Toyota RAV4 negyedik generáció
IDDS – az intelligens hajtásszabályozás

Közel 20 éve jelent meg a Toyota RAV4 első generációja. Neve betűszó, a Recreational Active Vehicle rövidítése, a rekreáció aktív járműve. A rekreáció az értelmező szótár szerint a szabadidő kulturált eltöltési formája, azon belül is a jó közérzet, a jól érzés, a jóllét, a jó minőségű élet megteremtése. Jól kitalálták ezt akkoriban, és mivel 19 év alatt összesen 4,5 millió RAV4 készült, az elképzelés be is jött. Európában 1,2 millió kelt el, amely a típus legnagyobb piaca. Magyarországon a Toyotamárkakereskedések eddig 3500 darabot adtak el belőle. A hazai autóslapok mind a modell történetét, mind a közelmúltban hazánkban is bemutatott negyedik generáció jellemzőit részletesen elemzik. Az Autótechnikában most az új összkerékhajtásról szólunk.
Az összkerékhajtás, a 4WD vagy AWD, eredendően a terepjárók, katonai járművek technikája volt. Ma is nélkülözhetetlen az off-road kategóriában. A nagy teljesítményű gépjárműveknél az útra átvihető vonóerő miatt kell a 4-kerékhajtás.
Az összkerékhajtás valaha vagy az állandó hajtást, vagy a kívülről kapcsolható hajtást jelentette. Az első kerékagyaknál kellett kézzel a kapcsolást – nem könnyen – elvégezni. Ez a technika is sokat, nagyon sokat fejlődött. Az állandó, de nem állandó megosztású hajtással lépett nagyot előre ez a hajtáslánc.

Kialakultak a változtatható nyomatékelosztás hardverelemei, így a visco-tengelykapcsoló, a torsen (torque sensing) vagy a lemezes tengelykapcsolók, melyek összeszorításuk mértékétől függően visznek át nyomatékot. Az összkerékhajtás – a tetszőleges mértékű nyomatékmegosztást létrehozni képes hardverrel – intelligens vezérlése révén sokkal többre képes, mint, hogy csak a nehéz terepviszonyokat küzdje le. Országúti haladásnál is számtalan előnye van.
Toyota IDDS
A dolog kulcsa tehát egy olyan osztómű, mely tág határok között, akár 0 és 100% között tudja az első, illetve a hátsó kerekekre kimenő nyomatékot megosztani. Ez még messze nem elég, mert ez csak az „izomzat”. Ész is kell neki, és főleg intelligencia. Az agy dönteni csak úgy tud, ha van információja. A menetállapotról, a vezetői szándékról, a környezetről jeladók informálják. Ha jó a döntési algoritmusa, a programja, akkor lesz egy 4WD (AWD) valóban a biztonság, a nem „gépészkedő” vezethetőség (habár ezt sokan szeretik!) kulcseleme.
A Toyota a RAV4 összkerékhajtásával ezen az úton ugrott előre, az élmezőny legjobbjai közé.
➊
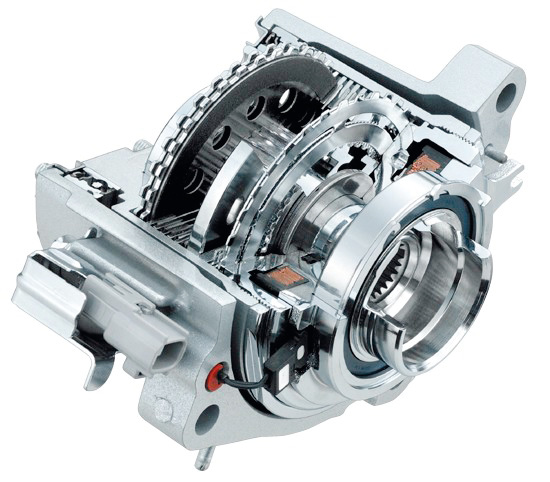
IDDS Intelligent Dynamic Drive System névre hallgató hajtásszabályozásnak eleme a „Dynamic Torque Control” (dinamikus nyomatékvezérlés), melynek meghatározó eleme a nyomatékosztómű, mely kivitelében egy soklemezes tengelykapcsoló.
Az osztómű a JTEKT hajtáselemeket és kormányműveket gyártó japán beszállító terméke ➊. A JTEKT ma már a Toyota tulajdonában van, a cég hírét az is megalapozta, hogy tőle származik a TORSEN differenciálmű, melynek nevét is levédették. Az ITCC – Intelligent Torque Controlled Coupling – osztómű egyelőre csak a RAV4 számára készül. Ehhez a megoldáshoz sem szükséges központi differenciál.
Az ITCC működése
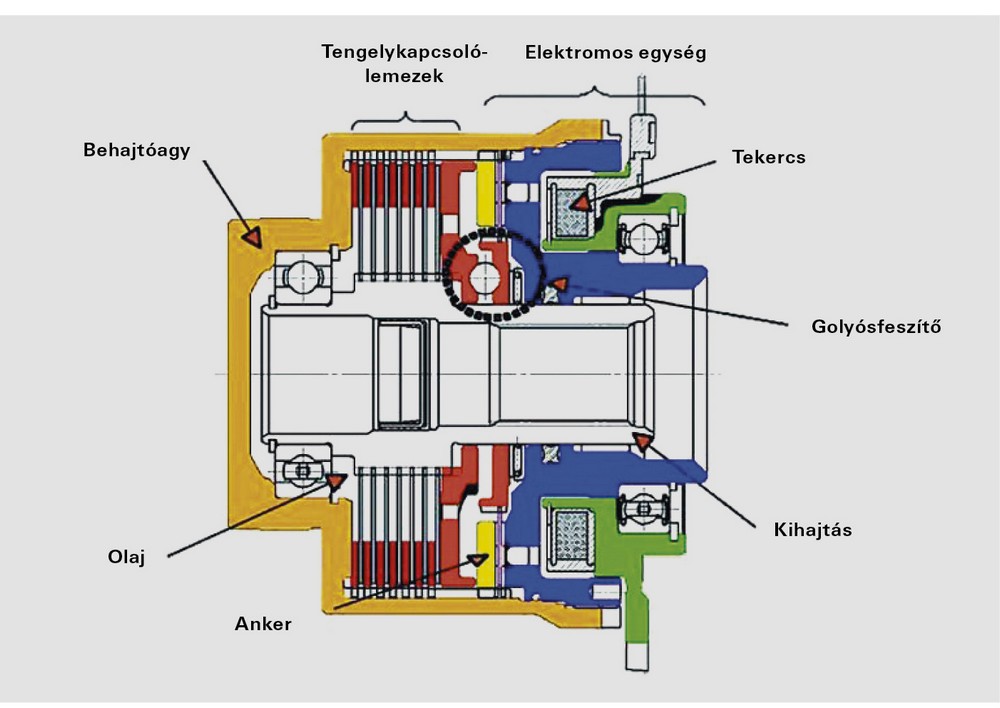
Az ITCC soktárcsás, olajban futó tengelykapcsolója viszi át a nyomatékot. Az ITCC-t a hátsó differenciálművel építik egybe. A lemezeket áttételesen elektromágnes ereje szorítja össze. A tengelykapcsoló osztómű vázlatát a ➋. ábra mutatja.
➋
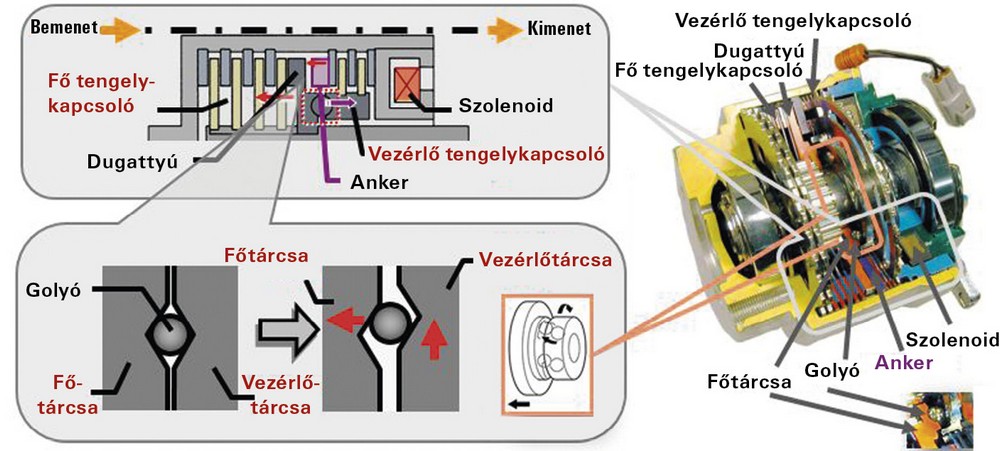
A soklemezes tengelykapcsoló nyomólapját záró irányba a nyomólap és ellendarabja, a vezérlőtárcsa közötti golyók mozdítják el. Az ellendarab elfordításával a golyók pályájukon úgy mozdulnak el, hogy közben a lapokat szétfeszítik ➌. A vezérlőtárcsát is a behajtótengely fordítja el egy vezérlő, szintén soklemezes tengelykapcsoló zárásával, illetve rész zárásával. A vezérlő tengelykapcsolót, ankertárcsa behúzásával, az elektromágnes ereje zárja.
➌
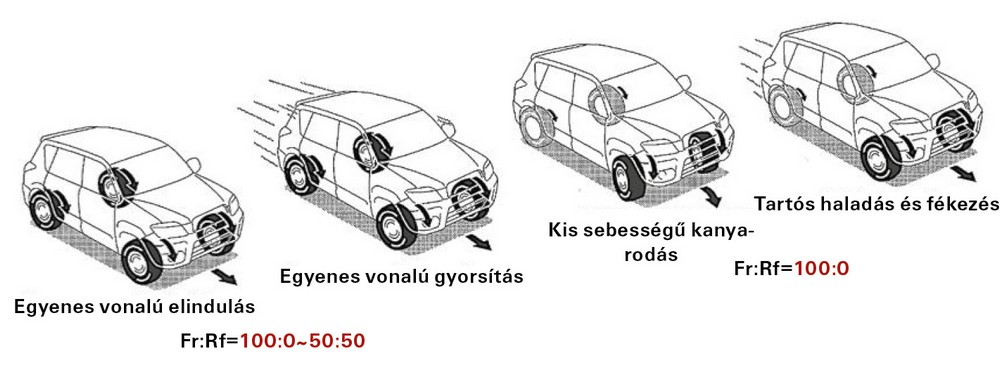
Alaphelyzetében csak az első kerekekre jut a motor forgatónyomatéka, így az autó tisztán elsőkerék-hajtású. A 2WD és az AWD üzemmódok szükség szerint automatizáltan jönnek létre. Terepezéshez, off-road üzemhez, vezetői utasítással fixre is zárható az összkerékhajtás. A különböző üzemállapotok jellemző hajtásmódjait a ➍. ábra foglalja össze.
➍
Az összkerékhajtás új funkciói
Néhány éve már olvashatjuk a szakirodalomban a proaktív kifejezést. Előrelátóan, kérés nélkül, automatikusan cselekvő rendszereket jelent a mi szakmánkban. Felkészülés új helyzetekre; felkészülés, hogy azokhoz alkalmazkodni tudjon az adott rendszer, vagy éppen elkerülhetőek legyenek vele a kritikus helyzetek, illetve kárt csökkentsen. A Toyota is alkalmazza ezt a kifejezést az AWD IDDS kapcsán.

Köztudomású, hogy a gumiabroncs és a talaj közti erő ívmenetben oldalirányú és hosszirányú komponensekre bontható. Az oldalirányú erő, illetve tapadás elvesz a hosszirányúból. Ha nagyon nyomjuk a gázt, a kerék kipöröghet, illetve nem tudjuk átvinni a talajra a vonóerőt. Ehhez jön még, hogy az autó nem követi a megkívánt ívet, alulkormányzott lesz. Ha rá kell kormányoznunk, még nagyobb lesz az oldalerő, és még kisebb a vonóerő.
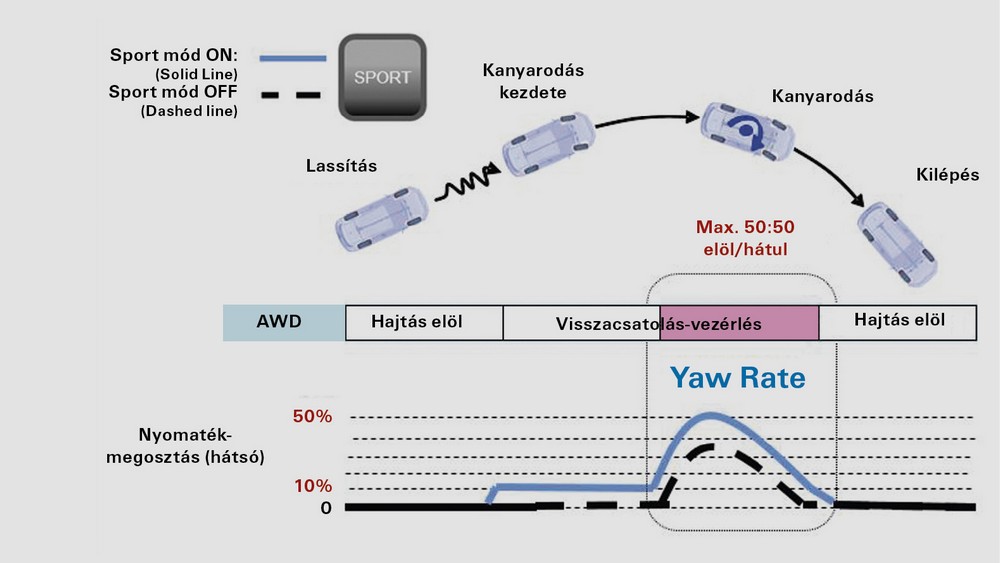
Mit lehet tenni, hogy ezt elkerüljük? Osszuk meg a szükséges vonóerőt a négy kerék között, adjunk hátra is. Ez az IDDS-nek gondot nem jelent. Ezzel jobb helyzetbe kerülnek az első kerekek a tapadást illetően és az autó sem lesz alulkormányzott. Ha a rendszer felismeri, hogy kanyarodáshoz készül autójával a vezető, akkor proaktív beavatkozásként megosztja a tengelyek között a nyomatékot. Max. 10%-ot küld hátra, ha az ún. SPORT módot választjuk. Készenlétbe helyezi magát. Ezt nevezi a Toyota Pre-Torque vezérlésnek.
➎
Benn a kanyarban a perdületérzékelő jele kap szerepet, jele alapján az IDDS figyeli a sodródást, a kitörésveszélyt és szükség szerint kezdi megosztani a nyomatékot, akár 50:50 százalékig is ➎. Kell hozzá kormánykerékelszacsatoló jelét. Ez a yaw-rate szabályozás. A teljes hajtásszabályozáshoz a leírások szerint 40 érzékelő jelét veszi figyelembe.
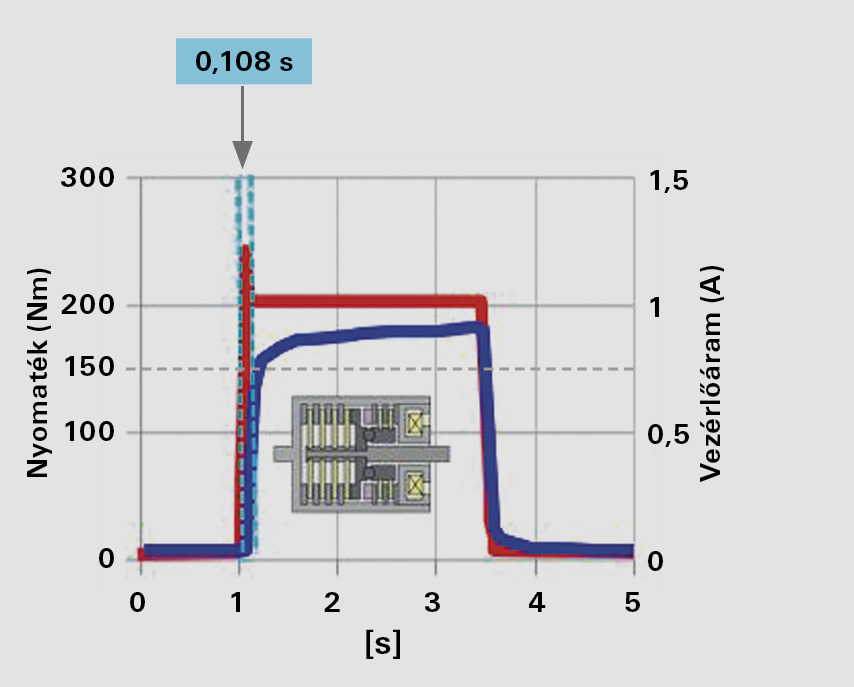
A szabályozás rendkívül gyors, ma veri a konkurencia elektrohidraulikus rendszereit. A hátsó tengelyre átszármaztatott nyomaték 0-ról és 150 Nm értékre a RAV4-nél 0,108 s áll be, míg a Haldex LSC rendszerrel a Ford Kugában ehhez 0,238 másodpercre van szükség ➏.
➏
A RAV4 összkerékhajtásának szerkezetei tömegükben és méretükben ma a legkisebbek, nincs szükségük hidraulikára. Hatásuk a menetszabályozás szinte minden területére pozitív, ahogy a szaknyelv mondja, kooperatív, azaz együttműködő. A rendszer új jeladókat nem igényel, a meglévők szenzorklaszterbe foglalása az AWD-t is kiszolgálja.


