
Félaktív és aktív kormányzás
A személygépjárművek szervokormányait sem kerülhette el az elmúlt években az az általános gépjárműszerkezet-reform, mely a tömegcsökkentést, a „tudás”-növelést és a karbantartási igény csökkentését célozza. A kormányzással számos biztonsági intézkedés lenne segíthető, és másodlagosan, de nem mellékesen, több kényelmi, kezelési funkció is teljesíthetővé válna. Ha…
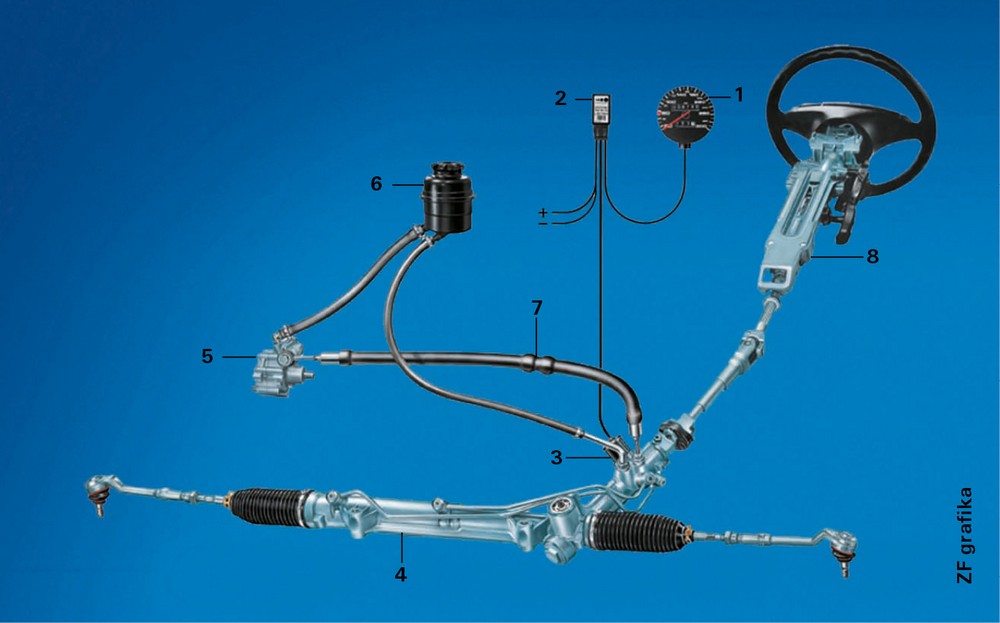
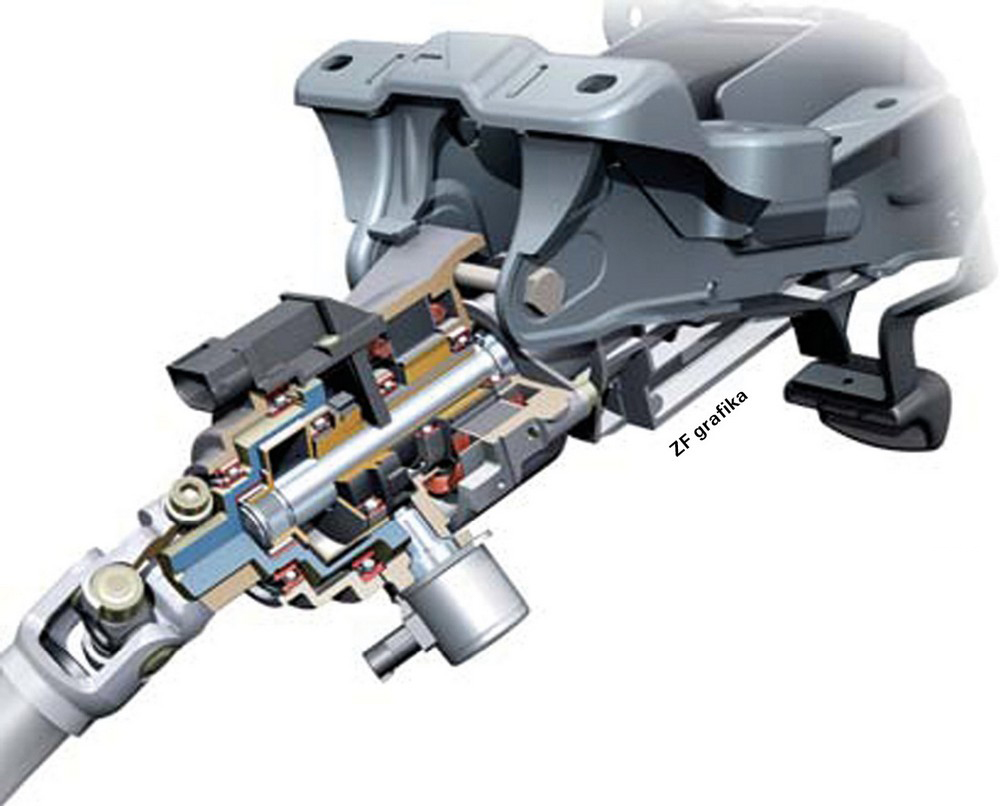
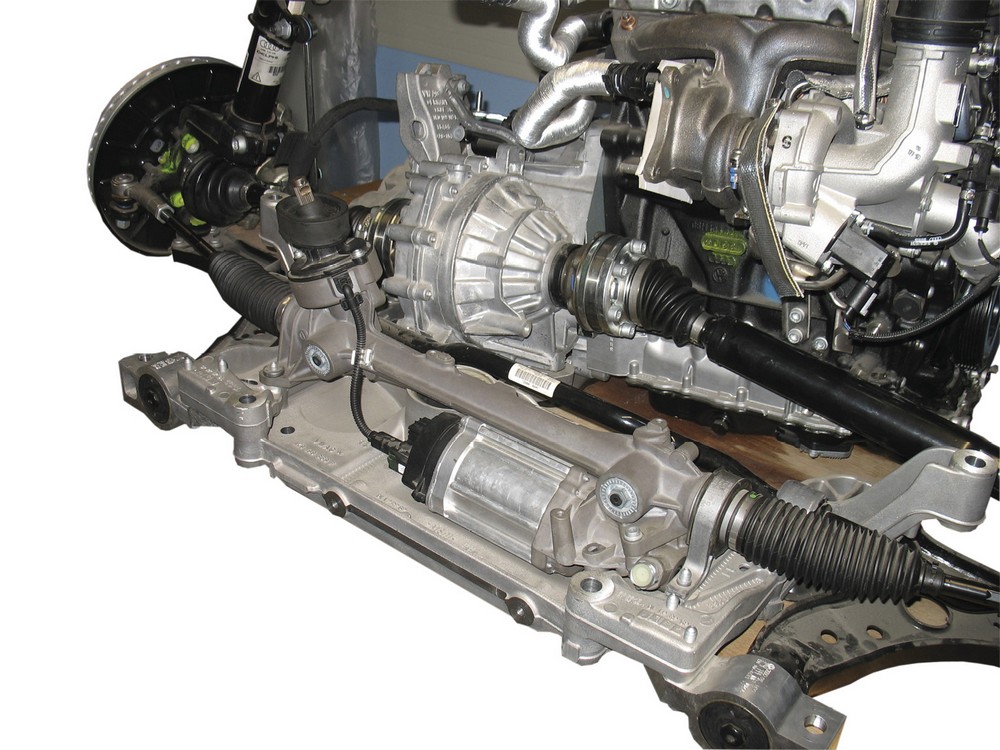
1. ábra: 1 – sebességjel a műszerfalból, 2 – vezérlőelektronika, 3 – elektrohidraulikus szelep, 4 – fogasléces kormánygép, 5 – szervoszivattyú, 6 – olajtartály, 7 – flexibilis, hidraulikus lengéscsillapító csővezeték, 8 – kormánykerék-állító mechanizmus
Ha a kormányzás jellemzői – így a szervohatás – igénynek, szükségnek megfelelően módosíthatóak lennének.
A mechatronika itt is a megoldás kulcsa: olyan mechanizmusokat kell létrehozni, melyek működése elektronikus irányítás alá vonható.
A szervokormányok (nincsenek ma más kormánygépek) lehetnek hidraulikus vagy villanymotoros rásegítésűek, tehát hidromechanikus és elektromechanikus szervokormányokról beszélünk.
A hidromechanikus kormány szervoszivattyúját a belső égésű motor állandóan hajtja, ha kell a szervorásegítés, ha nem. Ennél energiatakarékosabb, ha a szervoszivattyút villanymotor forgatja. A villanymotor üzeme a folyadékszállítási igényhez illeszthető.
A hidraulika-rendszer adottsága, hogy nyomás- és hozamszabályozást tesz lehetővé. A „ZF-Servotronic 2” hidromechanikus szervokormány gépkocsi-sebességfüggő szervohatást fejt ki (1. ábra). A szervoszelepbe elektromosan működtetett, szabályozható fojtást építettek, mely a gépkocsi sebességének növekedésével arányosan csökkenti a hidraulika-munkanyomást. A legnagyobb szervohatás a gépkocsi álló helyzetében, kis sebességénél alakul ki.
További „tudást” a hidraulikával nem vagy csak bonyolult vezérléssel lehet a rendszerbe bevinni. A tudásnövelés egyszerű módja, ha áttérnek a villanymotoros hajtásra, annak szabályozására.
Nézzük először, milyen képességekkel kell felruházni a kormányzást annak érdekében, hogy hozzájárulhasson a korszerű biztonsági és kényelmi követelmények teljesítéséhez.

2. ábra
Ki mit tud?
1 – A szervorásegítés legyen sebességfüggő: célszerű, ha álló helyzetben való kerékelfordítás, illetve kis sebességgel haladó, például parkolási manővereket végző jármű nagy szervoerővel segíti a kormányzást előremenetben és hátramenetben. Nagy sebességű haladásnál viszont kis mértékű legyen a rásegítés a biztonság érdekében. Ne lehessen könnyen (kis kézinyomatékkal) elkormányozni, ezzel – véletlen kormánykerék-elfordítással (például átnyúlás az anyós- ülésre) – könnyen nagy irányváltást okozni.
2 – A kormánygép áttétele legyen változtatható: az 1-es pontban leírtak akkor lehetnek igazán kedvezőek, ha a kormánykerék elfordítás/kerék elfordulás áttétel is változtatható. Parkolásnál célszerű a nagy áttétel, a kormánykerék-elfordítás nagy kerékelfordítást eredményezzen, nagy sebességnél viszont ugyanolyan mértékű elfordítás kis kerékelfordítást vonjon maga után.
Közepes sebességnél az áttételt – ahogy a prospektusok fogalmaznak – az „agilitás” határozza meg. A „sportos” üzemmódot választók a „direkt” áttételt várják el.
Autópályán, nagy tempóban, kis kormányáttétellel haladó gépjármű előtti automatikusan felismert akadály vészhelyzeti kikerülésénél a rendszernek a kormányáttételt növelnie kell tudni.
3 – Az ESP funkció támogatása: a gépjármű kitörésénél a függőleges tengely körüli perdülés mérsékelhető, megakadályozható kerekenkénti fékezéssel vagy hajtással, de jó eredmény érhető el kormányzással. A stabilizáló (ellen)kormányzásnak a vezetői kerékelfordítástól függetlennek kell lennie, azt növelheti vagy mérsékelheti.
Az ESP funkciót támogathatja a szervorendszer is azáltal, hogy a kritikus helyzetben a vezető által végzett elkormányzást, ellenkormányzást a szükséges mértékig szervoerővel is segíti. Nagy szervoerőt ad, ha további elkormányzás szükséges, és nem ad szervoerőt, ha már további elkormányzás nem szükséges.
4 – Elhúzáskorrekció: ha a gépkocsira hosszan tartó vagy állandó oldalerő hat, például tartós oldalszél vagy pályadőlés, esetleg az elhúzás futómű-beállítási vagy gumiabroncshibából ered, akkor kormányzással ezt korrigálni lehet, az egyenesmenetet kézi kormányzással nem kell biztosítani.
Az elhúzáskorrekció szükségességének másik esete gyorsításnál jelentkezik. A keresztbe beépített motoroknál a konstrukció általában olyan, hogy a féltengelyek hossza eltérő, ebből adódóan más a dőlésszögük. Gyorsításnál ez keréknyomaték-különbséget ad és csekély mértékű elhúzást eredményez. Ezt automatikus kormányzással korrigálni lehet.
5 – Önálló kormányzás: az automatikus parkolási manővereknél, farral való párhuzamos vagy merőleges beállásnál a kormányzás vezetői beavatkozás nélkül történik, illetve nem is szabad ilyenkor a kormányt megfogni.
6 – Automatikus kikerülés: váratlan akadály felbukkanásakor vagy utoléréses ütközés veszélyekor, a baleset következményeinek mérséklése, esetleg elkerülése végett, a vészfékezésen túl szóba jöhet az automatikus kormányzással történő irányváltás is. A kameraalapú környezetfelmérő rendszer adhat a kormányzásnak erre parancsot és vezényelheti a folyamatot. Ez a rendszer léphet működésbe a gépkocsi ütközés utáni, a gépkocsivezető által már nem irányított mozgásának kontrollálásában. Ismét csak azzal a céllal, hogy a baleseti következményeket mérsékelje.
7 – Segített, kontrollált kormány egyenesmeneti visszajárás: az elkormányzott kerék egyenesmenetbe való szabad visszajárását a kerékre ható, a futómű-geometriából adódó visszatérítő nyomaték okozza. A visszajárást az elektromos szervó segítheti, hogy az mindig határozottan, megadott sebességgel történjen. A kormánykerék-elfordulás szögjeladója azonosítja a középállást, ameddig a viszajárást a szervónak segítenie kell.
Aktív kormányművek
Mindezeket összességében tudják az ún. aktív kormányrendszerek. Az „aktivitás” lényege az, hogy a kerékelfordítás mindenkori szöge két bemenő elfordítástól függ: az egyik a vezetői kormánykerék-elfordítás, a másik a gépi korrekciós elfordítás, mely a kormánykerék-elfordítástól függetlenül azt meg tudja növelni vagy le tudja csökkenteni. Tehát a kerékelfordítás e kettő előjelhelyes összege lesz (2. ábra).
A ZF Lenksysteme adatai (egy beépítési példa) szerint 100o-os kormánykerék-szögelfordítás 6o kerékelfordítást jelent, ezt az aktív kormányzás 1,5o-kal tudja módosítani, tehát vagy 7,5o vagy 4,5o lesz eredőként a kerékelfordulás.
A szervorendszernek az aktív kormányzáshoz nincs köze. Az aktív kormányzás – e sorok szerzőjének ismerete szerint – vagy bolygómű, vagy hullámhajtómű révén valósul meg. Ez mind hidraulikus, mind villamos szervóval működhet együtt.
3. ábra
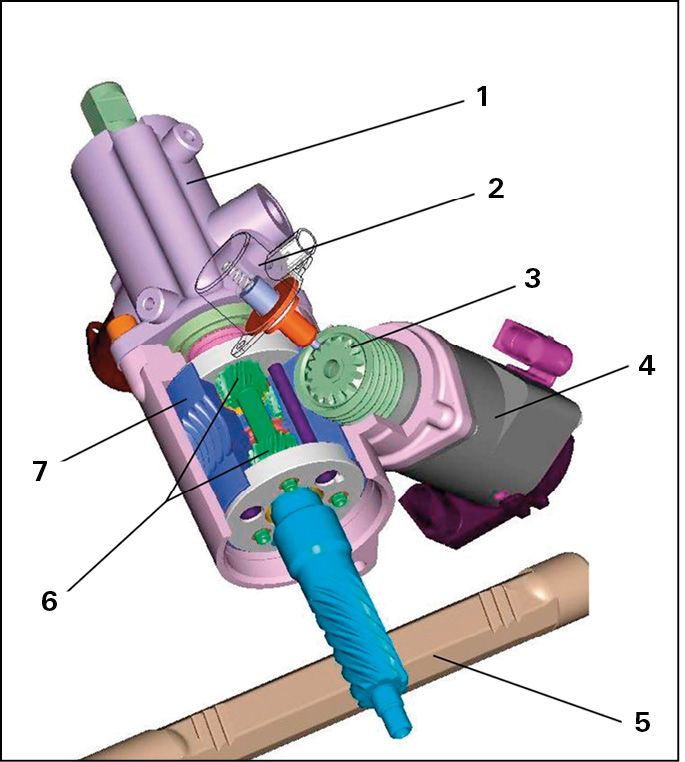
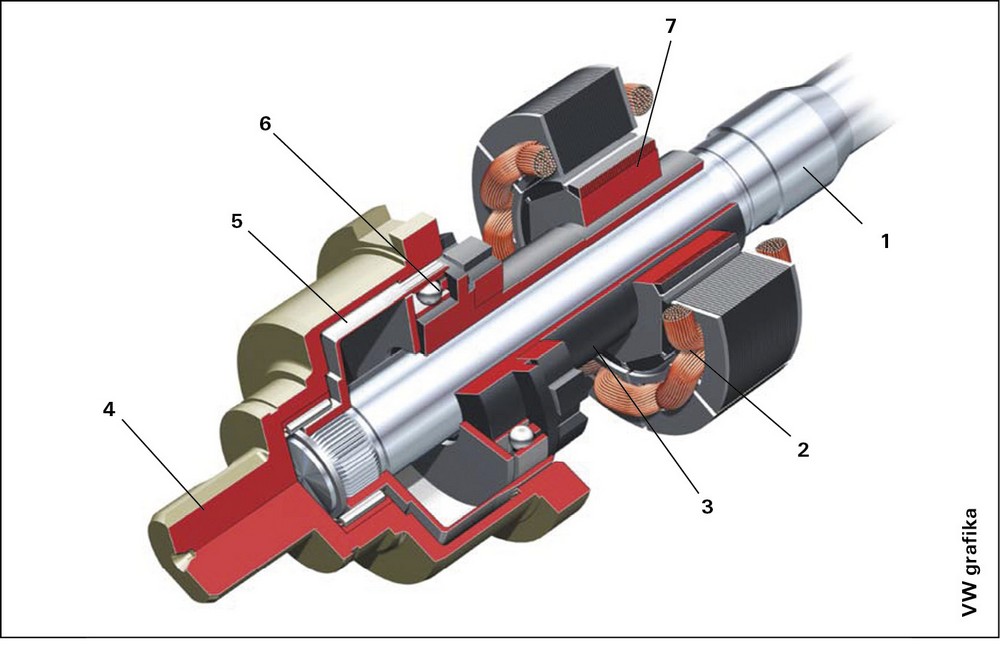
4. ábra: 1 – hidraulikus szervoszelep, 2 – arretáló retesz, 3 – csiga, 4 – villanymotor, 5 – fogasléc, 6 – bolygókerekek, 7 – csigakerék (bolygókeréktartó ház)
Az aktív kormányművek bolygóműves változatát BMW modelleken találjuk (3. és 4. ábra). A bolygókeréktartó ház a csigakerék, a csiga hajtása villanymotoros. Ha a bolygókeréktartó kikötött (leblokkolt), elfordulni nem tud, akkor a kormánytengely elfordulása áttétellel a fogaslécre tevődik át. Ez akkor szükséges, ha a diagnosztika az aktív kormányzás beavatkozó körében hibát észlel. Ha a bolygókerékház a kormánytengely-jelfordulással azonos értelemben fordul el, növeli az elkormányzást, az ellenkező esetben csökkenti. Kormány középállásban az aktív kormányzás jobbra is, balra is tud néhány fokot elfordítani, például oldalszél esetén. Az aktív kormány hidraulikus szervóval működik együtt, a szervo-vezérlőszelep a bolygómű elé került, látjuk rajta a ZF-Servotronic 2 – korábban tárgyalt – elektromos szelepét.
5. ábra
A ZF cég és mások is hullámhajtóművet alkalmaznak, hogy két szabadságfokúvá tegyék a kormányzást, azaz a kerék elfordulását két bemeneti jellemzővel együtt határozzák meg. Ismétlésként: az egyik a kormánykerék vezetői elfordítása, a másik a járműmozgás-szabályozás beavatkozása.
A hullámhajtómű (5. ábra) rendkívül kis helyet foglal el, például elhelyezhető a kormányoszlopon. Erre példát az Audi A4 „Dynamiklenkung” (dinamikus kormányzás) rendszere ad (6. ábra). Az aktív kormányzás teljes mechanizmusát az Audi számára a ZF-Lenksysteme gyártja, a hullámhajtóművet a Harmonic Drive AG. szállítja. Többnyire szokatlan gépelem ez, még a sokat látott autószerelőknek is. (Az Autótechnika 2011/4. számában megjelent „A hullámhajtómű és alkalmazása a gépkocsiban” cikk már szólt erről a technikáról). Szerkezeti képeink segítenek a megértésben, ami, valljuk be, nem könnyű. A szakmai csemegék általában nem adják meg egykönnyen magukat…
6. ábra
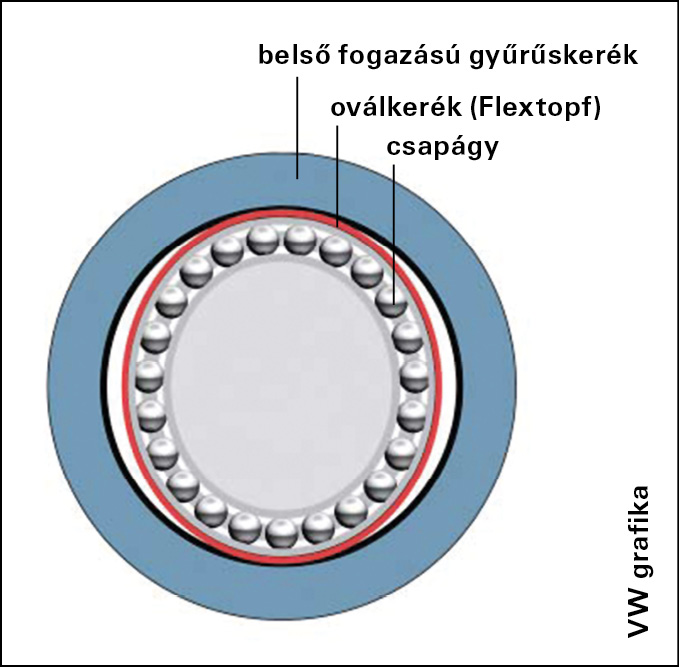
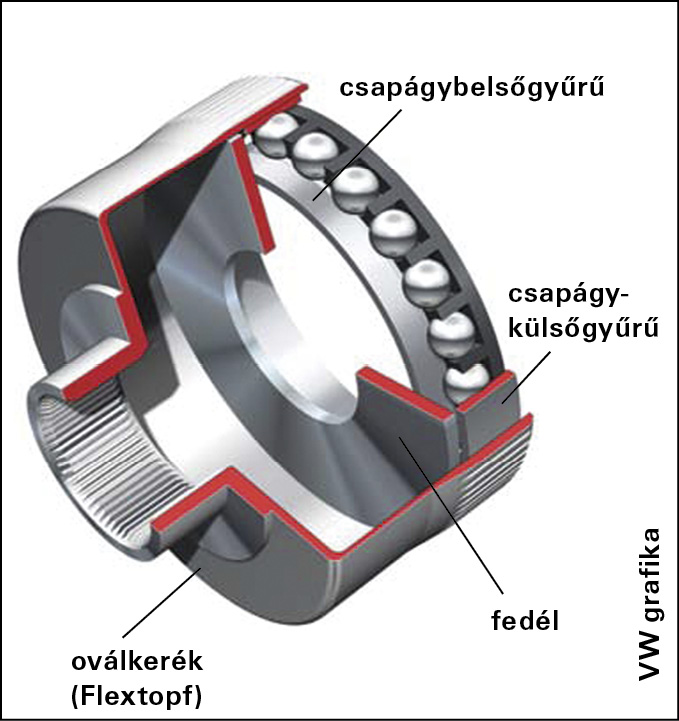
A kormánykerék elfordítása a hullámhajtómű ovális, deformációra képes (flexibilis) oválkerekére (Flextopf) hat (7. ábra), annak fogain át jut a gyűrűkerékre és végül a fogaslécet hajtó fogaskerékre. Az oválkerékben foglal helyet a villanymotorral forgatott hullámgenerátor-tárcsa. A villanymotor igen gyorsan forog, egy az egyben hajtva a hullámgenerátor-tárcsát. Mivel a hullámhajtóműnek igen nagy az áttétele, egy tárcsa-körbefordulásra csak két fogat fordul el az oválkerék, a gyors állításhoz szükséges a nagy villanymotor-fordulat (8. ábra). A tárcsa forgásirányától függően növeli vagy csökkenti a gyűrűkerék és így a kimenő kormánytengely elfordulását. A hullámgenerátor-tárcsa flexibilis golyóscsapágyazáson keresztül érintkezik az oválkerékkel. Az összeállítási rajzot a 9. ábra mutatja.
7. ábra
8. ábra: 1 – kormánytengely, 2 – villanymotor-állórész, 3 – oválkerék-csőtengely, 4 – gyűrűkerék-kihajtás, 5 – oválkerék (Flextopf), 6 – flexibilis golyóscsapágy, 7 – villanymotor-forgórész
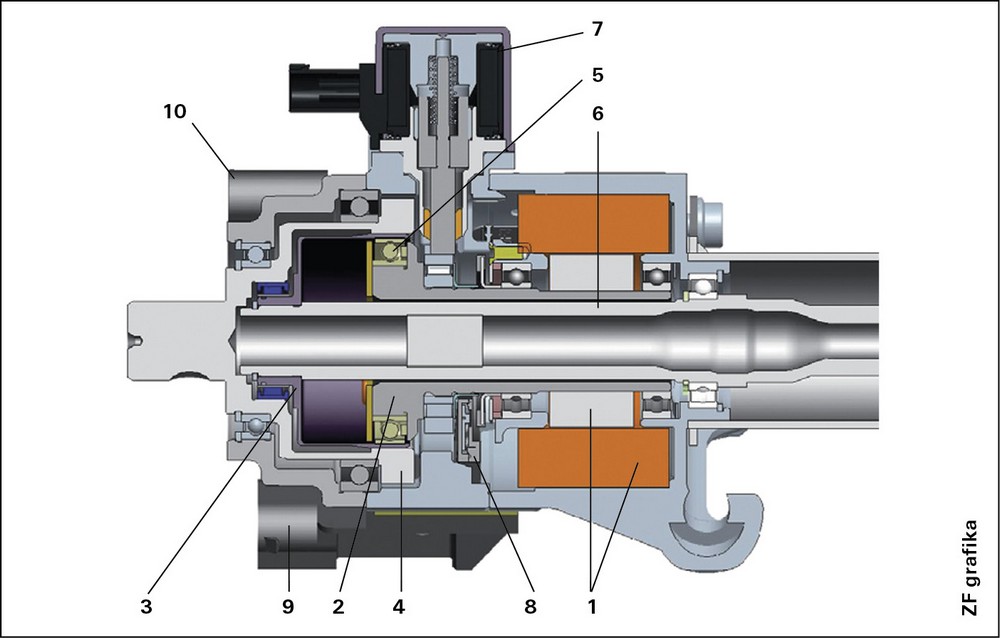
9. ábra: 1 – villanymotor álló- és forgórész, 2 – hullámgenerátor, 3 – oválkerék (Flextopf), 4 – gyűrűkerék, belső fogazású kimenőtengely, 5 – flexibilis golyóscsapágyazás, 6 – üreges kormánytengely (behajtás), 7 – arretáló mágnestekercs, 8 – motorszögelfordulás-jeladó, 9 – jelvezeték elektromos csatlakozó, 10 – főáramú csatlakozó
Az Audi „Dynamiklenkung” is hidromechanikus szervóval dolgozik együtt.
Az aktív kormány műszaki leírásaiban a hangsúlyt elsősorban a változtatható áttételre teszik, hiszen ez az a tulajdonság, melyet az autós érzékel és parkolásnál bizonyára értékel is. Ez angol rövidítéssel E-VGR (Electric variable gear ratio steering).
Félaktív szervokormányok
Az elektromechanikus szervokormányok irányítóegységei a fenti 1–7 követelményből csak arra nem programozhatóak, amihez vezetőfüggetlen korrekciós kerékelkormányzás szükséges, mert mechanizmusuk ezt nem teszi lehetővé. Mint láttuk a követelmények ismertetésénél, vannak a korrekciós kormányzást ugyan nélkülöző, de annak funkcióit támogató megoldások. Ezekre is programozhatóak az elektromechanikus szervokormányok. Ezért nevezzük az irányított – ECU „vezérelt” – elektromechanikus szervokormányokat félaktív szervokormányoknak.
Az autóvezető a funkciók többségét valószínűleg egyenként nem érzékeli, „csak” az a véleménye alakulhat ki, hogy az autó jól, könnyen irányítható, parancsait engedelmesen követi.
Az EPS-család
Az EPS (a nemzetközileg használt angol kifejezés, az Electrical Power Steering rövidítése, de van aki Electrically Assisted Steering néven és EAS rövidítéssel illeti) a félaktív elektromechanikus szervokormány már ma is jelentős elterjedtségű az autótechnikában, 2016-ra pedig már várhatóan minden második autóban ilyen kormányszerkezet lesz. A szerkezeti kialakítás változatos, a villanymotoros hajtómű elhelyezkedése lehet:
– a kormányoszlopon, az áttétel csigahajtás (EPSc, ahol a „c” a column, oszlop szót jelöli),
– a fogaslécet hajtó fogaskerék-behajtásnál, az áttétel csigahajtás (EPSp, ahol a „p” a pinion, behajtó fogaskerék szót jelöli),
– a fogasléccel párhuzamos tengelyelrendezéssel, az áttétel kétszeres csigahajtás (EPSdp, ahol a „dp” a double pinion kifejezést rövidíti), 10. ábra,
10. ábra
– a fogasléccel párhuzamos tengelyelrendezéssel, az áttételt különböző átmérőjű fogazott kerekek adják szíjhajtással, a fogasléc elmozdítása golyósorsóval történik (EPSbd, ahol a „bd” a belt drive, szíjhajtás kifejezést takarja), 11. ábra,

11. és 12. ábra
– a fogasléccel egytengelyű elrendezésű, a villanymotor forgó- és állórésze a fogaslécet körülfogja, a fogaslécre a forgórész golyósorsón keresztül viszi át a nyomatékot (EPSrdd, ahol az „rdd” a rack direct drive, fogasléc közvetlen hajtás kifejezést jelöli), 12. ábra.
A rendszer jeladói, működéséhez szükséges bemeneti információk (13. ábra):
– kormánykerékelfordítás-szögjeladó (vagy a kormányoszlopon vagy a kormánygép behajtásnál),
– kézinyomaték (torziósrúd-elcsavarodás érzékelése),
– villanymotor-fordulatszám és szögsebesség-jeladó,
– villanymotor/elektronika hőmérséklet,
– tápfeszültség
– motorfordulatszám,
– gépkocsisebesség,
– ESP-beavatkozás.
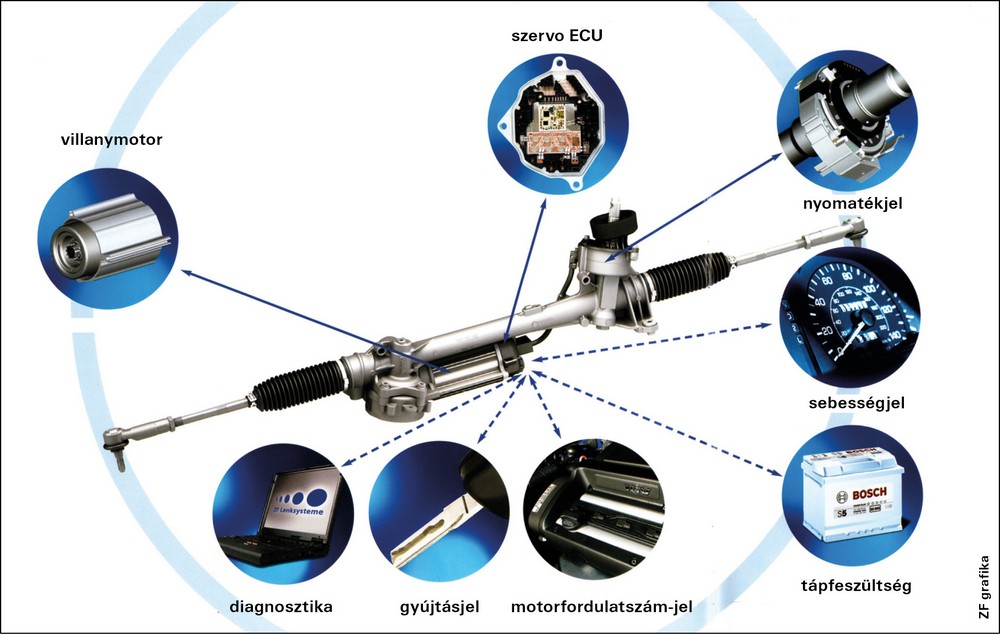
13. ábra
Jelen cikkünkkel nem törekedtünk többre, csak annyira, hogy bepillantást adjunk a korszerű, elsősorban elektromos szervokormányok világába. Reméljük, sokaknak adott újat azzal, hogy a kormányok megmutatták, sokkal többet tudnak, mint elődeik, és mára miként váltak a jármű-menetviselkedés szabályozásának integrált elemévé. A téma további kifejtését ígérjük, hiszen szerkezettanilag is be kell mutatni őket, diagnosztikájuk mellett rendszerbe illesztésük eljárása is megér egy eszmefuttatást.


