
Intelligens HALL kerékforgás-érzékelő
A hagyományos indukciós kerékfordulatszám érzékelők kiváltására több mint tíz évvel ezelőtt megjelentek a kétvezetékes, magnetorezisztív vagy HALL elven működő szenzorok (1. ábra). Ezen szenzorok tartalmaznak egy kétértékű áramgenerátort, melynek a segítségével a szenzorok kimenő jele kétféle áramérték, azaz a szenzor 7 mA és 14 mA között ,,kapcsolgat”. Míg jellemzően a TEVES a magnetorezisztív szenzorokat, addig a BOSCH a HALL effektus alapján működő szenzorokat részesíti előnyben a különböző ABS és ESP rendszereinél.
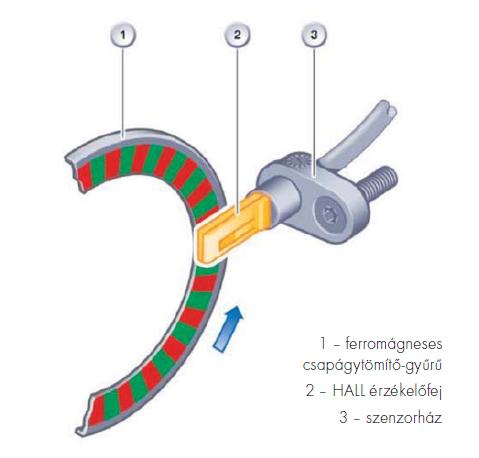
1. ábra: HALL-os kerékfordulatszám érzékelő mágneses csapágy-tömítőgyűrűvel
A magnetorezisztív elven működő szenzoroknak egyes változatai a kerékforgásirány és légrés adatokat a kerékfordulatszám jelek közé beszúrt adatbitek segítségével közlik az elektronikával. A HALL-os szenzorok azonban a kimenő négyszögjel kitöltési tényezőjének változtatásával továbbítják a mérési adatokat (PWM - Pulse Width Modulation). A kerékforgásirány érzékelése szükséges információ a lejtőn való elindulást segítő rendszereknek (Hill holder function), illetve kieső GPS jelek esetén válik fontossá a jármű haladási iránya. A HALL-os szenzorok egyes változatai a magnetorezisztív szenzorokkal egyezően az indukciós kerékforgásérzékelőknél használt póluskereket vagy a kerékcsapágy tömítőgyűrűjébe integrált északi és déli pólusokkal ellátott tárcsát használják jeladó tárcsaként. A kerékforgásirány meghatározásának az elve egyszerű, ugyanis ugyanaz a szenzor nem egy, hanem három önálló HALL mérő cellát tartalmaz. Szilícium hordozóba integráltan a három mérőcella 200 mikrométer átmérőjű HALL elemekből épül fel (2. ábrán).
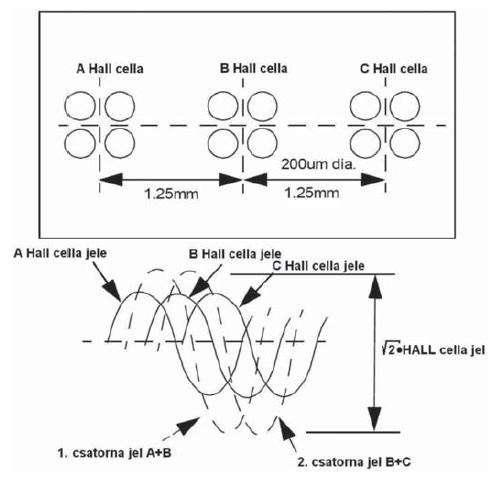
2. ábra: A szenzor belső felépítésének és működésének vázlata
A három cella egymáshoz képest el van tolva 1,25 mm-el. Így a kerékforgáskor az egyes cellák szinuszos kimenőfeszültsége szintén egymáshoz képest fáziskéséssel rendelkezik. Az egyes cellák kimenőfeszültségének amplitúdója arányos a mágneses tér erősségével és a HALL elemeken átfolyó árammal (HALL plate bias current). A három mérőcella kimenő szinuszos feszültségét a 2. ábrán alul látható elven két mérőcsatorna kialakításával összegzik. Az 1. csatorna segítségével a kerékfordulatszám, a második csatorna az első csatorna jeléhez képesti pozíciójából a forgásirányt határozzák meg.
Az első csatorna szinuszos jelének csúcstól-csúcsig mért feszültségértéke arányos a mágneses tér erősségével, ami azonban közvetlen kapcsolatban van a szenzorvég és jeladó tárcsa közötti légrés nagyságával. A szenzor kimenő jelének kitöltési tényezője a 3. ábrán láthatóan változhat. Az egyes esetek magyarázata a következő. Minden egyes pólusváltáskor négyszögjel jelenik meg a szenzor kimeneten (a szenzor árama 7 mA-ről 14 mA-re nő).
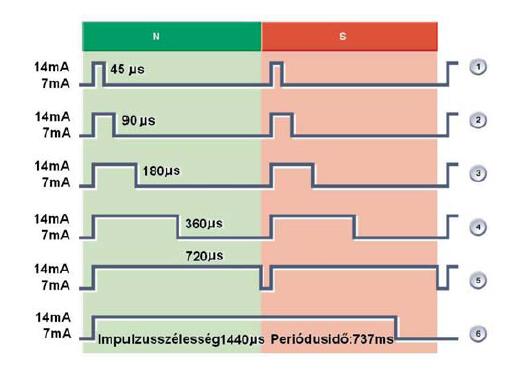
3. ábra: A szenzor kimenőjel kitöltésitényezőjének változásai
A 3. ábrán jelzett első eset, amikor a négyszögjel 45 µs idejű, akkor következik be, mikor a jeladó még érzékeli a mágneses pólusváltásokat (kicsi a HALL cellák kimenő szinuszos feszültsége), még azok kiértékelhetők, de további légrés növekedés már meg fogja hiusítani a jelképzést (air gap limit). Ilyenkor a 45 µs-os jel forgásiránytól függetlenül azonos. A 2. és 3. esetként jelzett 90, illetve 180 µs-os jel kitöltés normális mágneses térerősségnél (a mágneses indukció B>4 mT) a kerék egyik, illetve másik irányú forgásakor jön létre. A 4. és 5. eset a 360 és 720 µs-os jel gyenge mágneses térerősségnél (2mT
A bemutatott érzékelő főbb paraméterei:
tápfeszültség: 4,5 – 20 V-ig,
maximális tápfeszültség ellentétes polaritású bekötés esetén: 30 V,
működési hőmérséklet tartomány: -40-től 150°C-ig,
kimeneti áram alacsony értéke: 5,5-8,5 mA,
kimeneti áram magas értéke: 11 – 17 mA.
Remélhetőleg a fenti információk hasznukra vállnak egy későbbi hibakeresés során.


