
Az elektrohidraulikus szervokormány villamos oldala
Nehéz újat mondani a Nap alatt, de az ismétlés a tudás anyja. Tekintsünk rá egy kicsit a kormányműre, s rájövünk, hogy a technika fejlődésével - ahelyett, hogy egyszerűsödne - egyre bonyolultabbá válik. Először csak gépészeti alkotás, majd belopja magát a hidraulika, végül pedig ránk köszön a villamosság teljes arzenáljával: motor, hajtás, teljesítmény félvezetők, mikrokontroller. Minek kell már lennie egy autós szakembernek, hogy mindehhez értsen? És ez a valóság, ott van az ügyfél kocsijában, valamit kell kezdeni vele. A hogyan és miértekre való rálátásban próbál segíteni ez a cikk.
A szervokormányt úgy alakítják ki, hogy a gépkocsivezetőnek kormányzáskor a kormányzási ellenállással arányos, de annál lényegesen kisebb erőt kell kifejtenie, azaz továbbra is megmarad a kormányérzéke. Ha szervoberendezés működésképtelenné válik, akkor a gépkocsi kormányozható marad, de a vezetőnek a teljes kormányzási munkát kell kifejtenie. Az elektrohidraulikus szervokormány elemei az 1. ábrán láthatók.
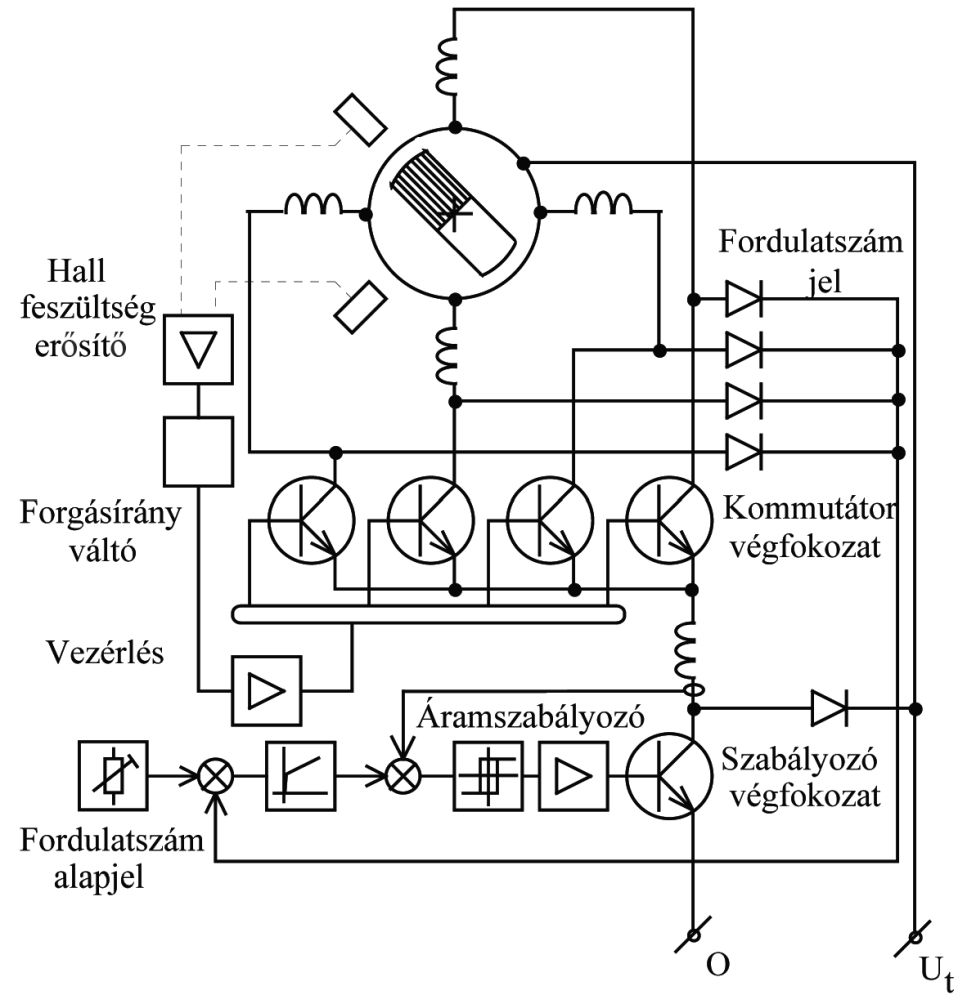
1. ábra: egy kefe nélküli egyenáramú motor kapcsolásának tömbvázlata fordulatszám-szabályozással és forsági irányváltással
Mivel a belső égésű motor fordulatszáma a forgalmi helyzet, a menetsebesség stb. függvényében állandóan változik, ezért a szervoberendezés működését ettől függetleníteni kellett, a közvetlen szíjhajtást fel kellett váltani a villamos hajtással.
A villamos hajtás
A hidraulikus rendszerek villamos hajtásával szemben támasztott főbb követelmények a következők:
- kis tömegű motor,
- túlterhelhetőség,
- fordulatszám szabályozhatósága,
- jó hatásfok.
A gépkocsiban rendelkezésre álló 12 V-os egyenfeszültségű hálózat az egyenáramú motorok alkalmazását szorgalmazza.
Kommutátoros egyenáramú motor
A hagyományos értelemben vett egyenáramú motorok kommutátorral és szénkefével rendelkeznek. Annak ellenére, hogy külső mechanikai jelleggörbéjük, a nyomaték-fordulatszám karakterisztika, M(n), kedvező és könnyen szabályozhatók, a szénkefe és a kommutátor által okozott problémák (kopás, szikrázás, elszennyeződés, elektromágneses zavarok) miatt egyre kevésbé alkalmazzák őket.
Kefenélküli egyenáramú motorok
Annak a feladatnak, hogy egy motort kefék nélkül tápláljunk többféle megoldása lehet:
- aszinkron motor és áramirányító kombinációja,
- szinkron motor és áramirányító kombinációja,
- ismert, hagyományos egyenáramú motor kommutátorának elektronikus megoldással való helyettesítése (kefenélküli egyenáramú motor).
A kefenélküli egyenáramú motorok forgórésze állandó mágnes. Az állórész tekercseit kapcsolótranzisztorokon keresztül táplálják. A tranzisztorokat egyedül a forgórész szöghelyzete szerint kell kapcsolni a fordulatszámtól függetlenül. Ez a feltétele annak, hogy a gép önmagától fel tudjon futni. A forgórész helyzetének a tranzisztorok vezérléséhez szükséges érintkezésmentes érzékelésére sokféle eljárás alakult ki. Ezek közül a legelterjedtebb a két Hall-elem alkalmazása. További megoldások:
- mágnesességre érzékeny ellenállások vagy diódák,
- ferrorezonanciás áramkörök,
- optoelektronikai alkatrészek stb.
A kefenélküli egyenáramú motorok tulajdonságai az egyező alapelvek miatt messzemenően hasonlítanak a hagyományos egyenáramú motorokéihoz: az I motoráram lineárisan nő a nyomatékkal, az n fordulatszám a nyomaték növekedésével enyhén csökken, ha nincs fordulatszám szabályozás.
Az állórész tekercselésének rossz kihasználtsága miatt - a klasszikus egyenáramú motorokkal ellentétben, itt minden tekercs csak a körbefordulás egy részében vezet áramot - a kefenélküli motorok rézveszteségei különösen nagyok. Nagy légrésindukció kialakításával a rézveszteségek elfogadható határok között maradnak, ezért gyakran AlNiCo mágneseket alkalmaznak, mivel anizotróp bárium-ferrit mágneseket nehéz hengeres formában előállítani. Az állórész tekercselések rossz kihasználtsága arra vezet, hogy a kefenélküli motorok kisebb teljesítményt tudnak leadni, mint az ugyanannyi anyagot felhasználó hagyományos egyenáramú motorok.
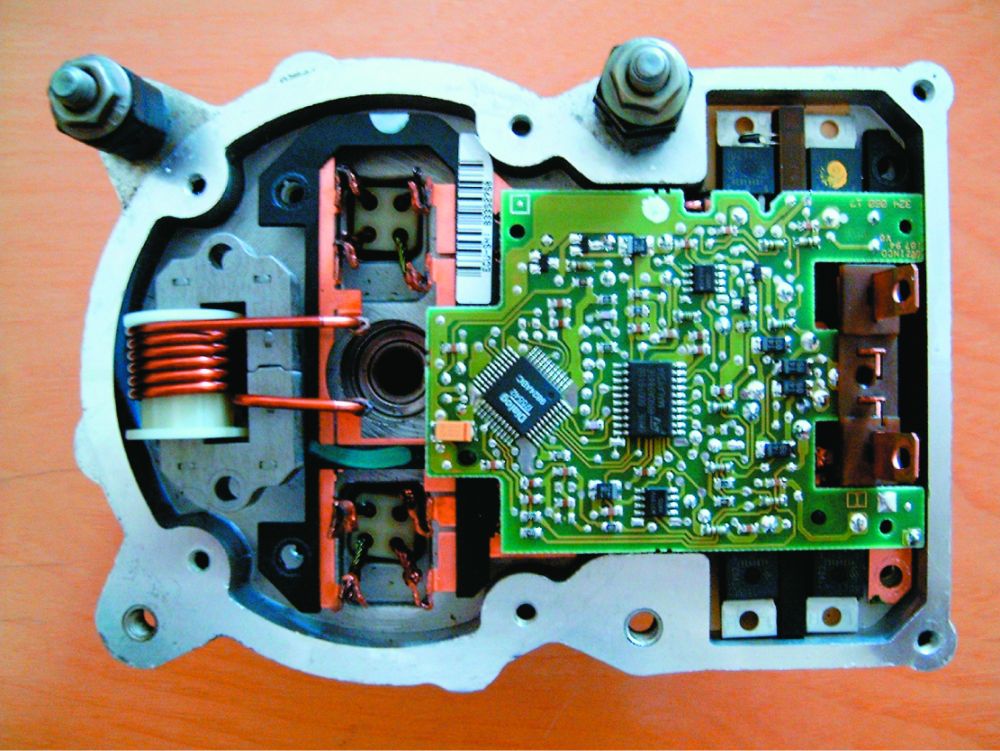
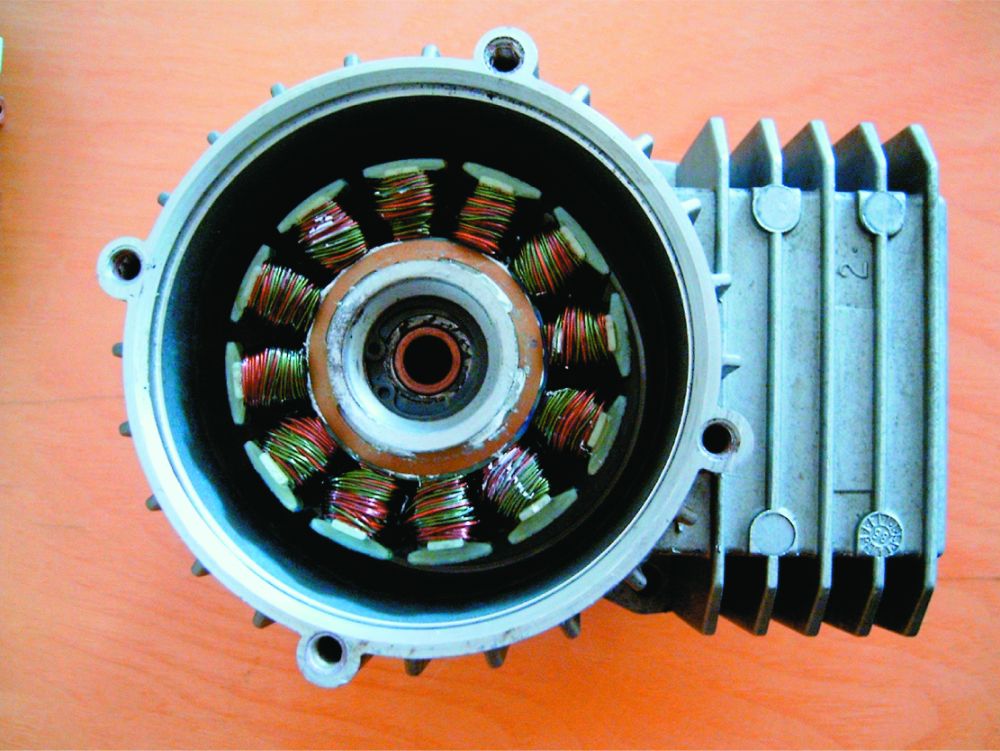
2A ábra: vezérlő áramkör elhelyezése a motorházba
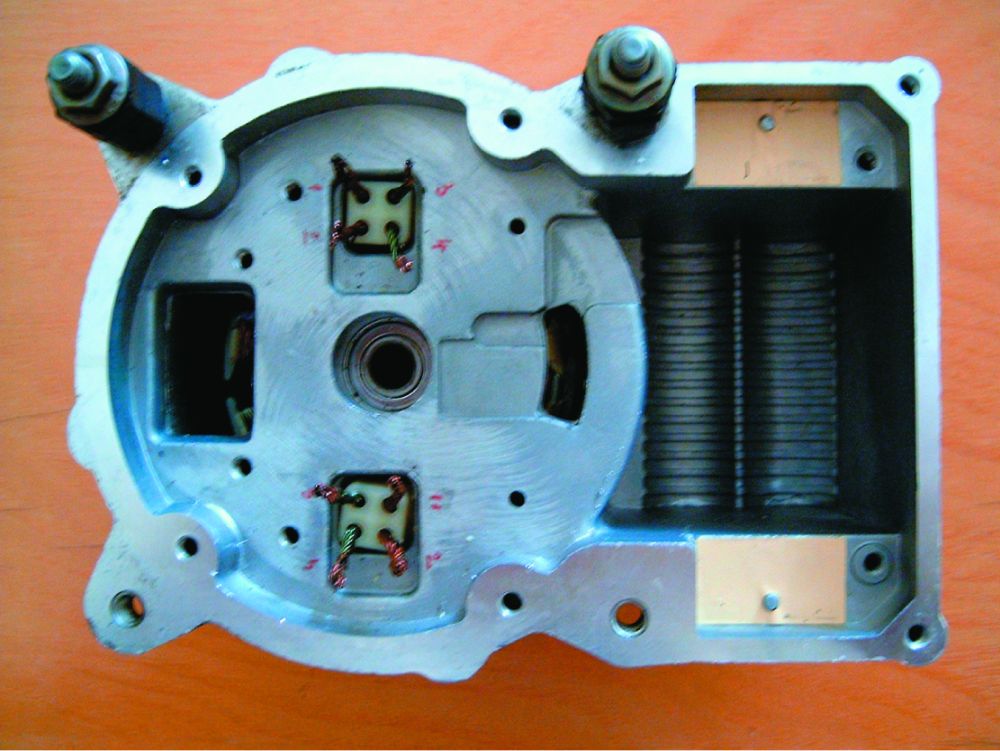
2B ábra: a motorház a vezérlő áramkör kiszerelése után
A mechanikus kommutátor elmaradásából származó előnyök ellentéteként a motor nagyobb alkatrész ráfordítást igényel - főként elektronikában - és ez a hagyományoshoz képest nagyobb árat jelent. A többletköltségek jelentőségét csökkenti azonban a hosszabb élettartam, a karbantartási költségcsökkenés és esetleg a zavarszűrő áramkörök költségének elmaradása.
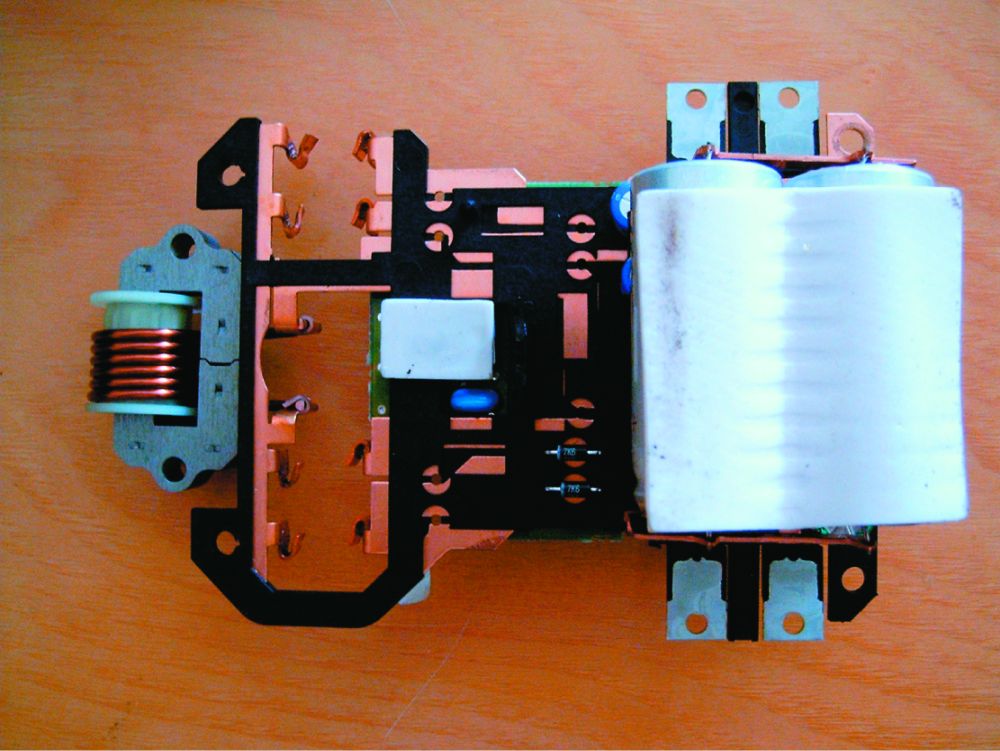
2C ábra: a vezérlő áramkör alsó kialakítása
2D ábra: az állórésztekercsek központi elhelyezése a motorházban
A 2. ábra egy mindkét irányba forogni képes, kefenélküli motor tömbvázlatát mutatja be, ahol az irányváltást a Hall-generátorok jeleinek polaritásváltásával lehet megvalósítani. A fordulatszámszabályozás a szaggató-üzemben működő teljesítmény végfokozat (tároló fojtó, szabadonfutó dióda, kapcsoló tranzisztor) segítségével közel veszteségmentesen valósítható meg, miközben a kommutátorfokozat tranzisztorai kapcsolóüzemben működnek. Emellett az áramszabályozó a motor áramát induláskor, fordulatszám változáskor vagy nagy terhelés esetén egy előírt, még károsodást nem okozó határ alatt tartja. Ez az áramkorlátozás természetesen nyomatékhatárolást is jelent, ami a hajtás számára esetleg szükséges nyomatékhatároló tengelykapcsolót szükségtelenné tesz.

2E ábra: forgórész, belső palástján elhelyezett mágnesekkel
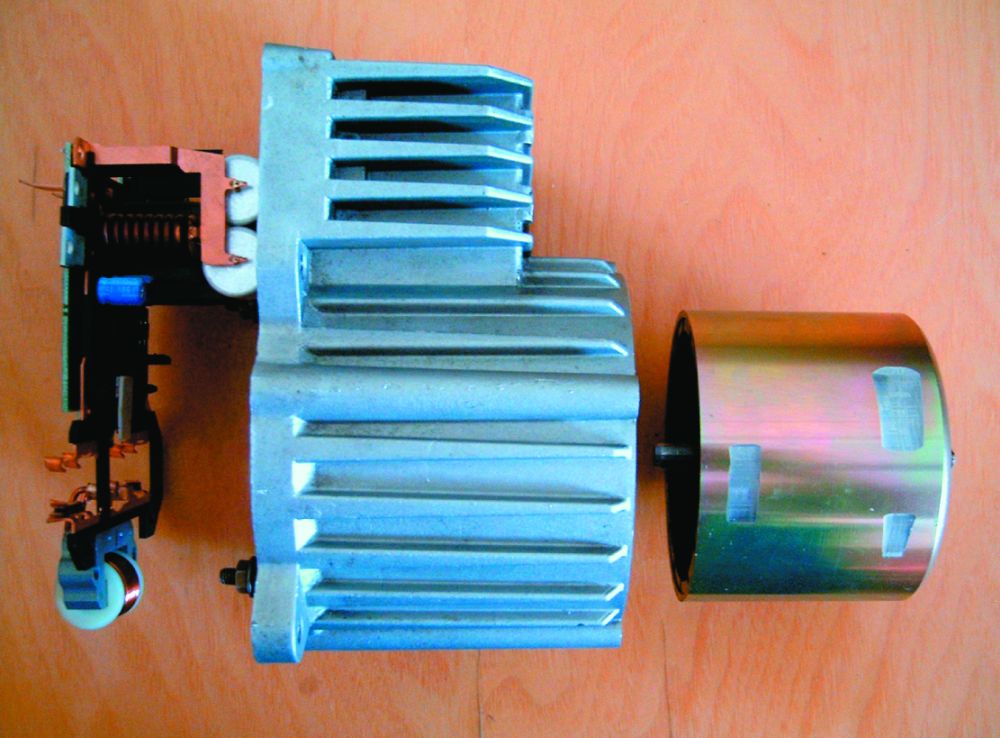
2F ábra: a villamos hajtás egységei: vezérlő áramkör, állórész és serleges forgórész
Álló állapotban a kefenélküli motorral egyszerűen úgy lehet tartónyomatékot elérni, hogy valamelyik tekercsre az elektronikus kommutátortól függően egyenáramot kapcsolunk. A hidraulikus szervókormány szivattyújának hajtáshoz szükséges néhányszor 100 W-os teljesítmény kedvező a kefenélküli egyenáramú gép alkalmazására.
Állandómágneses szinkron motor
Az állandómágneses szinkronmotor működésének megértéséhez képzeljünk el egy körmöspólusú váltakozóáramú járműgenerátort, azzal a kitéttel, hogy a gerjesztő tekercsét hengeres állandómágnessel helyettesítjük és az állórész tekercseit mi tápláljuk kívülről háromfázisú feszültséggel. A térben eltolt tekercsrendszerre kapcsolt időben változó feszültségrendszer egy forgó mágneses mezőt hoz létre, amihez kapcsolódik a forgórész állandó mágnese. Mivel az állórész mágnese mezeje és a forgórész együtt forog, szinkron motornak nevezzük.
Az elektronikus vezérlés
Többfajta vezérlés alkalmazható, annak függvényében, hogy szinkron motort vagy kefenélküli egyenáramú motort kell meghajtani. Egyik fontos adat a vezérlés kiválasztásánál a fázis szám, azaz az állórész tekercseinek megtáplálása. A szinkronmotor megtáplálásához 3 fázisú hídkapcsolású ún. invertert alkalmazunk, amely a gépkocsi akkumulátora által szolgáltatott egyenfeszültséget 3 fázisú váltakozó feszültséggé alakítja.
Egy lehetséges megoldást a 3. ábrán látunk: Infineon C-164-es 16-bites mikrokontroller, amely tartalmaz 64 kB ROM-ot, 4 kB RAM-ot, egy 10-bites A/D átalakítót, USART, SPI és időzítő egységeket, valamint CAN kapcsolódási pontot, kombinálva a TLE 6280 GP meghajtóval és teljesítmény MOSFET-ekkel.
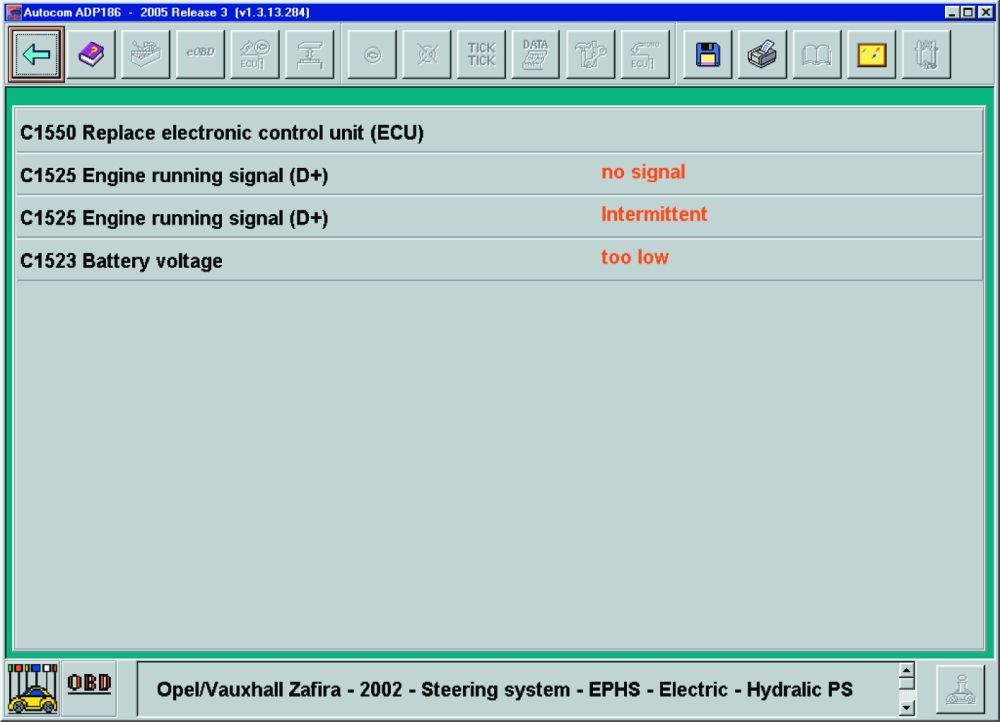
3A ábra: kiolvasott hibakódok
3B ábra
3C ábra
3D ábra
Egy elektrohidraulikus szervokormány hajtómotorjának szerkezeti felépítése
Opel Astra G és Zafira gépkocsikban található, TRW gyártmányú, első generációs elektrohidraulikus szervókormány villamos motorját, vezérlését tettük a boncasztalra, nevezetesen próbapadi mérésnek vetettük alá.
Talán ez az egység okozza a legtöbb fejtörést, hiszen a nyomtatott áramkör tartalmazza a villamos hajtást vezérlő elektronikát. Sőt nem árt némi hardverközeli programozásban szerzett elméleti és gyakorlati tapasztalat. Vannak esetek, amikor roncsolásmentesen szinte ki sem bontható a szivattyúval és olajtartállyal egybeépített házból. A 4/A…F fényképek segítségével a motor belvilágába tekinthetünk be.
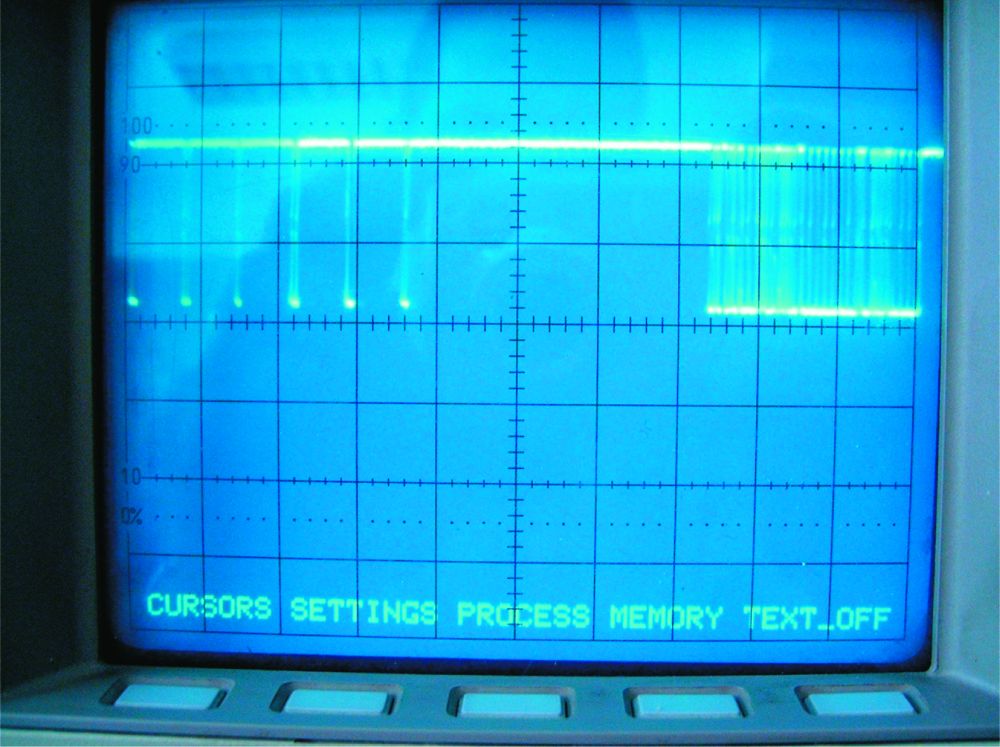
4. ábra: kommunikációs protokoll
Az állórész tekercsek ellenállására (0,4 … 0,5) Ω közötti értékek mérhetők. Ez azt jelenti, hogy egy közvetlen és folyamatos 12 V-os megtáplálásnál akár 30 A áram is átmegy a tekercseken, amely érték nem megengedett, mert a tekercsek túlmelegedéséhez vezet, tekintettel a zománcozott rézhuzalok keresztmetszetére. Viszont szakaszos üzemben, annak függvényében hogyan aránylik a bekapcsolt állapot időtartama a kikapcsolt állapot időtartamához, ettől az értéktől nagyobb áram is folyhat, vagy éppen akár egy rövid ideig tartó túlterhelést is képes elviselni.
Az állórész 12 tekercsét 3-as csoportokban táplálják meg. Így négy helyzetbe állítható az állórész mágneses fluxusa. A vezérlő elektronika alapján feltételezhető az impulzusos megtáplálású üzem, amelynek során az árammeredekséget a hasított vasmagon elhelyezett tekercs korlátozza. Ez védelmet nyújt a teljesítmény tranzisztorok nagy árammeredekség terhelése ellen is. Az 55 V-os 80 A-es BUZ111SL n-csatornás MOSFET további adatai a http://www.datasheetcatalog.com/datasheets_pdf/B/U/Z/1/BUZ111SL.shtml internetes címről tölthetők le. Meghibásodásuk esetén ezzel egyenértékű tranzisztorokkal kell cserélni.
Mindegyik tranzisztor drain (D), jelen esetben középső kivezetése a tekercsek egyik kivezetésére csatlakozik. A tekercsek másik kivezetése közös sínen van. A csatlakozások sajtolással történnek. Az érintkező felületek galvanikus kapcsolatának ellenőrzése fontos. A forgórész serleges kivitelű, amelynek a belső palástfelületén 14 mágnes van elhelyezve, váltakozó polaritással. A mágnesek mechanikai tulajdonságaira való tekintettel, figyelni kell, hogy mechanikai sérülések ne legyenek, mint pl. repedés, törés. A forgási sebességet a vezérlő áramkör impulzusának frekvenciája, illetve a mágneses fluxus léptetésének módja határozza meg.
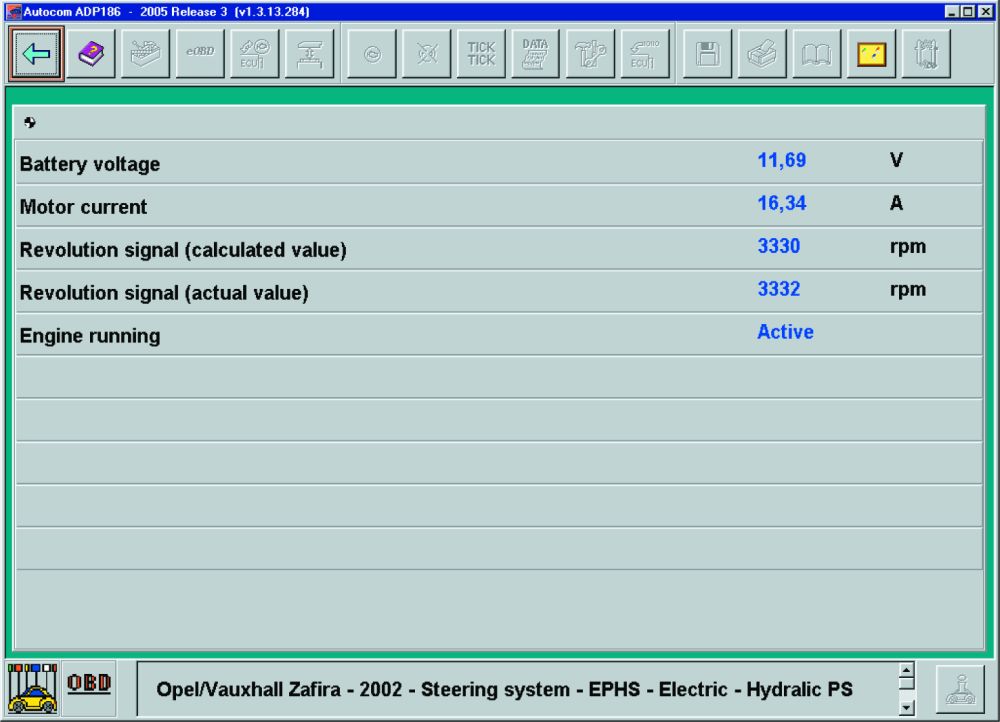
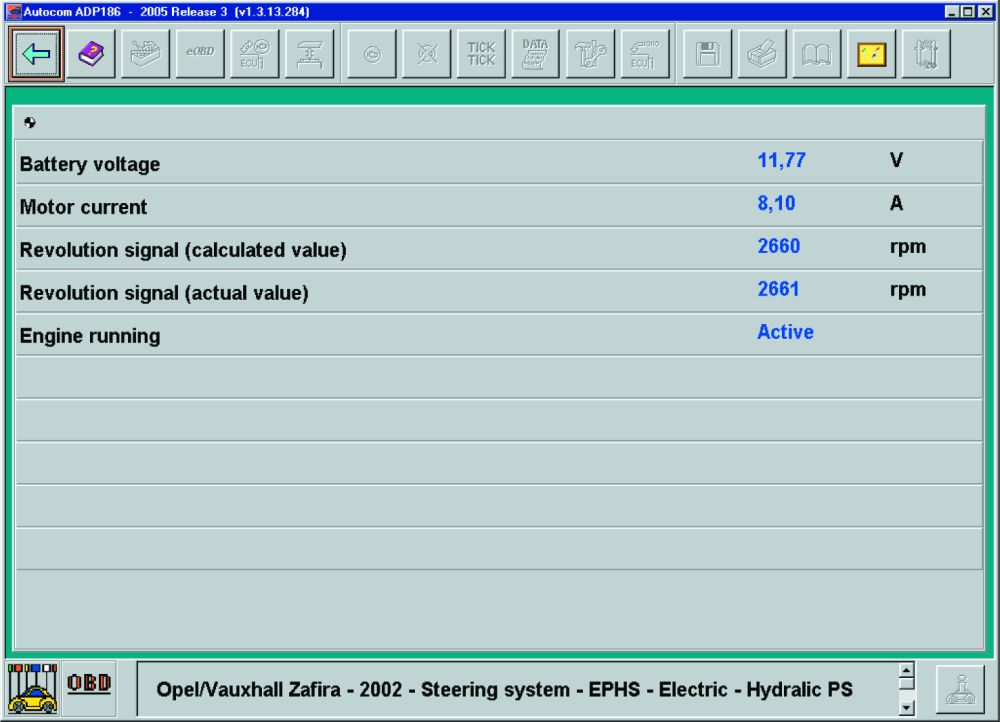
Laborvizsgálatok és diagnosztika
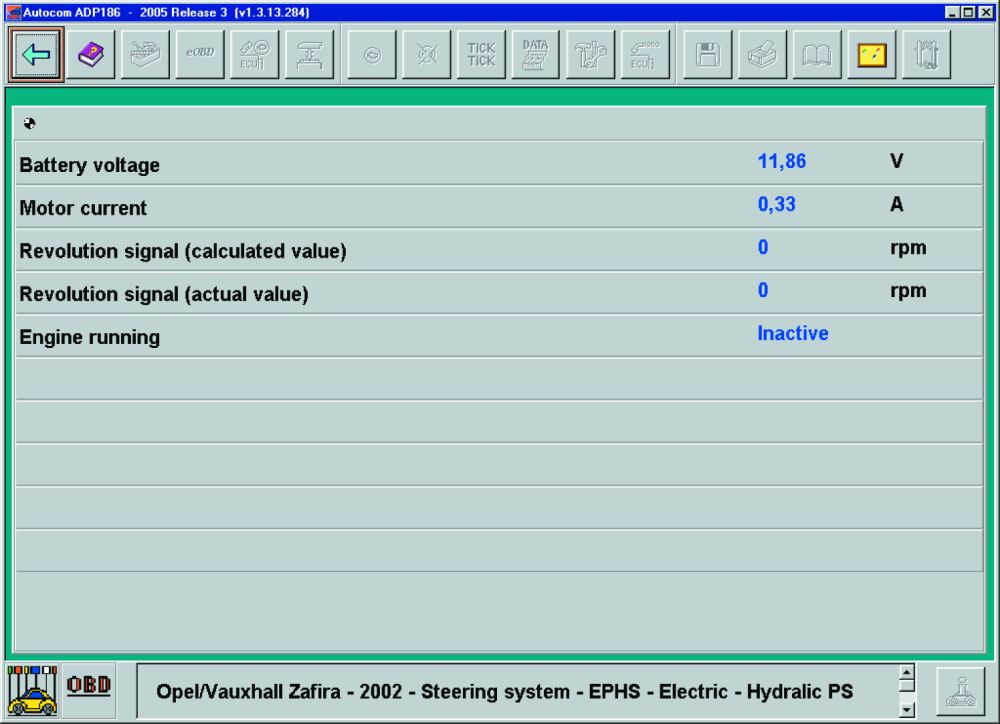
Az elektrohidraulikus szervokormánynál szétválaszthatunk egy mechanikai szerkezetet, egy hidraulikus berendezést és egy villamos hajtást. Mindegyik kényes szerkezet a maga nemében és komoly szakmai ismereteket igényel a tervezésben, gyártásban, javításban és karbantartásban. Mindegyik szerkezetnek megvannak a sajátosságai, de talán a legnehezebb belelátni a villamos hajtás egybeöntött vezérlő áramkörébe. Ezért a korszerű elektrohidraulikus szervokormánymű diagnosztika kimenettel rendelkezik, amelyik kommunikál a központi elektronikus vezérlő egységgel. Többféle hibaüzenetet tud jelezni, mint például az akkumulátor feszültsége túl kicsi vagy éppen túl nagy, a motorvezérlő elektronika belső áramköre hibás, cserélje ki az elektronikus vezérlő egységet vagy éppen azt, hogy nem talált hibát. Ezen túlmenően egyes üzemi paramétereket is kijelzi, mint például a tápfeszültség, áram, számolt és mért fordulatszám. Ezek az adatok különböző diagnosztika készülékekkel olvashatók ki a soros diagnosztikai aljzaton keresztül. Az 5/A…D ábrasorozaton mutatunk erre példákat. A diagnosztikai méréshez az ADP 186-os készüléket használtuk.
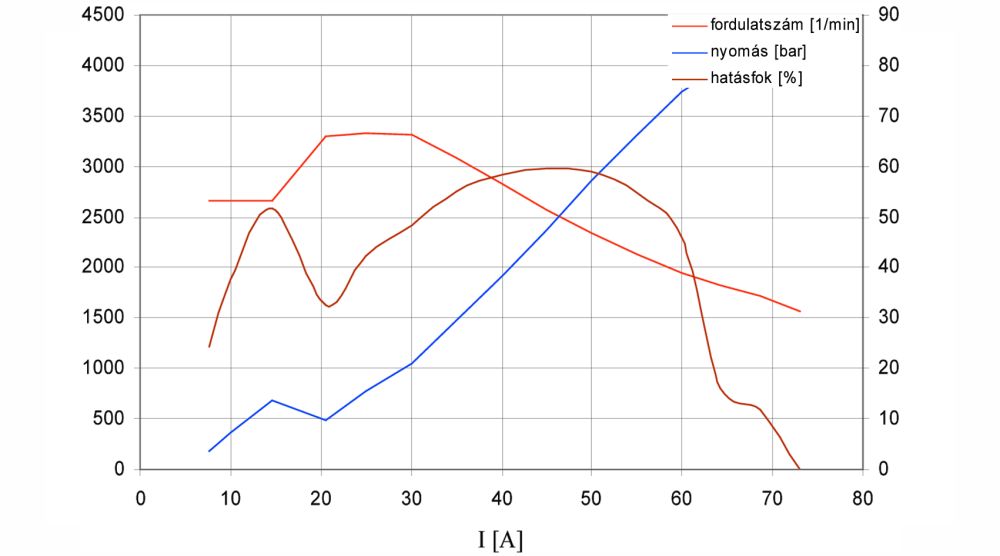
5. ábra: a fordulatszám, a nyomás és a hatásfok változása a terhelő áram függvényében
A 4. ábrán a diagnosztikai vezetéken mérhető jelek sorozatának oszcilloszkópon mért ábrája látható. A jeleknek két stabil állapota van: az egyik 0 V-on, a másik 12 V-on. Ez a két állapot meredek jelváltozással követi egymást és egy sorozatot alkot, amelyben a jelek egymásutánisága egy bizonyos rendet követ. Ezt nevezik protokollnak és ez az alapja a soros kommunikációnak (adatközlésnek), hasonlóan a CAN rendszerhez, ahol más feszültségszintek és más protokoll van. Bármely protokollnak van indítása, utasítása, adattartalma, ellenőrzése és zárása. Az indítás és zárás még nyomon követhető oszcilloszkópon, de a többi kódolt formában jelenik meg. Ezt visszakódolni nem egyszerű, sőt nem olyan rövid idő alatt, amilyen gyorsan követik egymást a jelsorozatok. Ezért célszerű diagnosztikai műszert használni, amelyik dekódolja a jeleket és a számunkra hasznos adatokat megjeleníti, mint például a hibakódokat vagy a mért villamos jelek nagyságát.
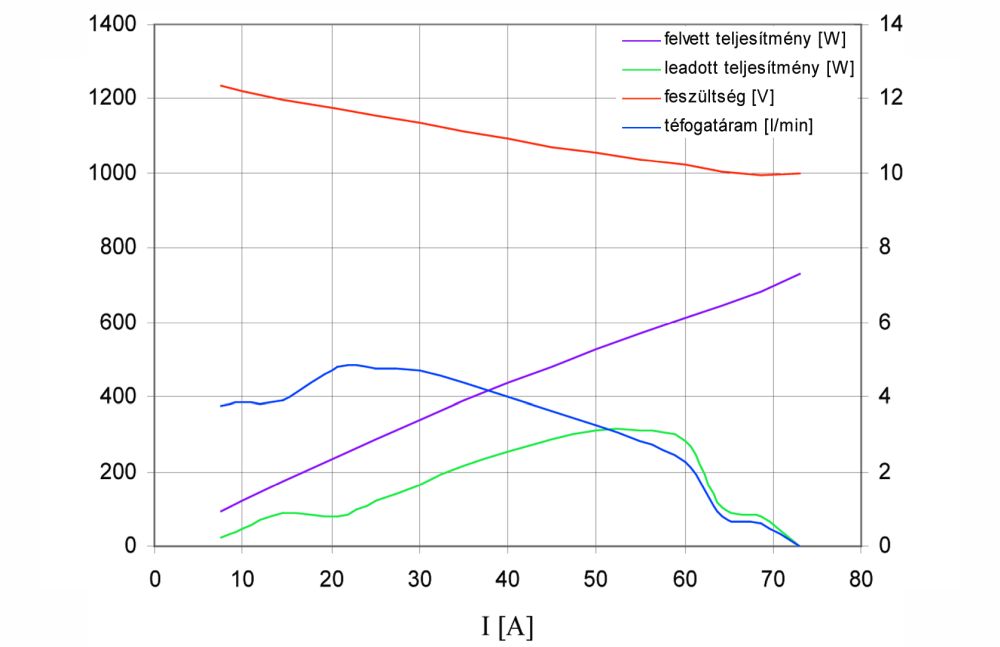
6. ábra: a felvett és leadott teljesítmények, a feszültség és a térfogatáram változása a terhelő áram függvényében
A különböző paraméterek változása a terhelő áram függvényében az 5. és a 6. ábrákon látható. A mérési eredmény összesítésével az alábbi megállapításokat tehettük:
- a legnagyobb nyomás átlaga 83 bar, a legnagyobb hatásfok átlaga 63%;ú
- a tengely fordulatszáma 2600 min-1 15 A terhelésig, majd 20 A-től 3600 min-1;
- a terhelés növelésekor és csökkentésekor a fordulatszám váltás nem azonos értéken történik, tehát úgynevezett hiszterézises jelleget mutat;
- 30 A felett a fordulatszám a számolt érték alá csökken, tehát már nem szabályozható.
Az akkumulátor feszültsége 12,5 V-ról csökken 10 V-ra a terhelő áram növekedésével. A legnagyobb felvett teljesítmény a legnagyobb terhelő áramnál 73 A-en 740 W. A leadott teljesítmény 55 A-nél éri el maximumát 310 W-ot. A legnagyobb térfogatáram 4,8 liter/perc 20 A-nél mérhető.
A következő hibakódok jelentkeztek a mérés során:
- Elektronikus vezérlő egység (EVE) csere. Nem számít hibának hisz a központi elektronika nélkül végeztük a méréseket.
- Alacsony akkufeszültség. Normálisnak tekinthető, hisz generátor nélkül mértünk, s mint tudjuk a generátor 14,5 V körül tölti az akkumulátort.
- Magas akkufeszültség. Egyszer fordult elő, véletlenszerű hibának minősíthető.
- Nincs hiba. Szerencsés eset - ilyen is van …
- Belső motor áramköri hiba. Két esetben jelentkezett, de mindkét esetben végigment a próbapadi mérés. A villamos hajtás szétszerelése ezidáig nem történt meg.
Voltak esetek, amikor több hibakód is jelentkezett egy berendezésen.
Blága Csaba, Kovács Ernő
Miskolci Egyetem
Elektrotechnikai-Elektronikai Tanszék
Irodalomjegyzék
- Bauer Horst: Automotive Handbook, Robert Bosch GmbH, Stuttgart, 1996.
- Moczala Helmut: Törpe villamos motorok és alkalmazásaik, Műszaki Könyvkiadó, Budapest, 1984.
- Eriksson, Sture: Drive Systems with Permanent Magnet Synchronous Motors, ABB, 1994.
- Fűzy Olivér: Áramlástechnikai gépek és rendszerek, Tankönyvkiadó, Budapest, 1991.
- www.howstuffworks.com
- www.iet.com
- www.delphi.com
- www.infineon.com
- www.ir.com


