
Aktív stabilizátorok 2. rész
A feladat adott, a gépjármű ívmenetében, sávváltási manőver során a kocsiszekrény dőlésének szabályozott csökkentése. Ezt elsősorban kényelmi szempont indokolja, de legalább ilyen fontos a jármű sajátkormányzási tulajdonságainak kedvező alakítása is. Erre a legkézenfekvőbb megoldás a stabilizátor rúd merevségének a lehető legrövidebb reakcióidővel történő változtatása. Cikkünk második részében nem foglalkozunk újra a miértekkel, hiszen azok a BMW és a LEXUS esetében is megegyeznek. Látni fogjuk, hogy a műszaki megoldást illetően, csak a két stabilizátorrúd-fél elcsavarásának technikájában van különbség.
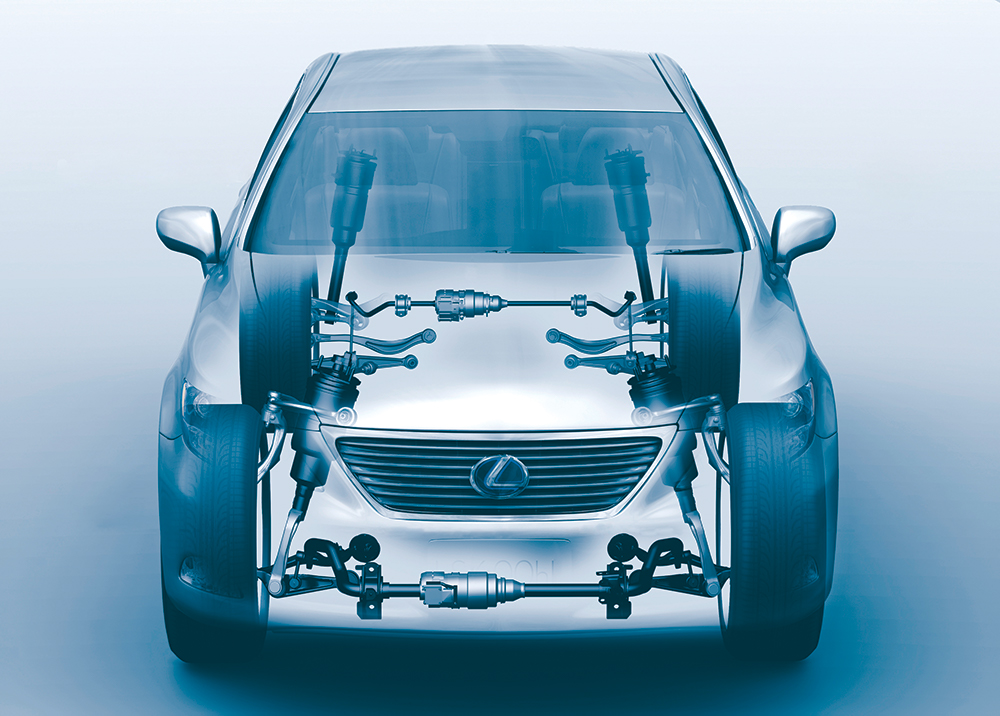
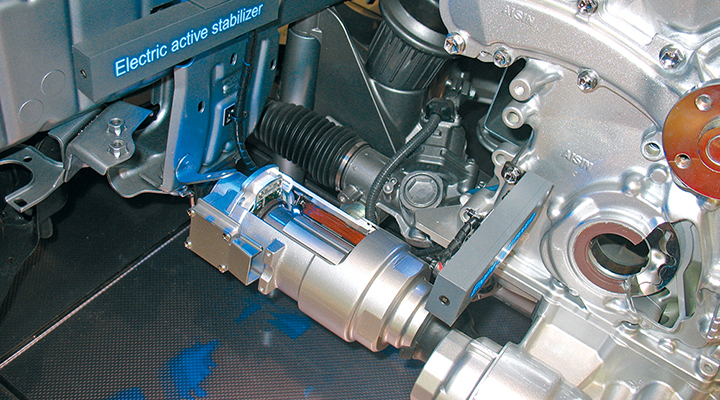
A LEXUS LS600H/GS450h rendszere
A Lexus aktív stabilizáló rendszer esetében a félbevágott stabilizátor rudakat egy kefe nélküli DC motor köti össze. Az egyik fél a villamosmotor forgórészéhez, a másik pedig a házhoz van erősítve. Természetesen közéjük egy nagy áttételű hullámhajtóművet szereltek.
Azt, hogy a két stabilizátor rúd mennyire forduljon el egymáshoz képest, az első és hátsó stabilizátor rudakhoz tartozó ECU határozza meg
- az elkormányzás szög,
- a jármű sebesség,
- a legyezési szögsebesség és
- a gyorsulás érzékelőinek jelei alapján.
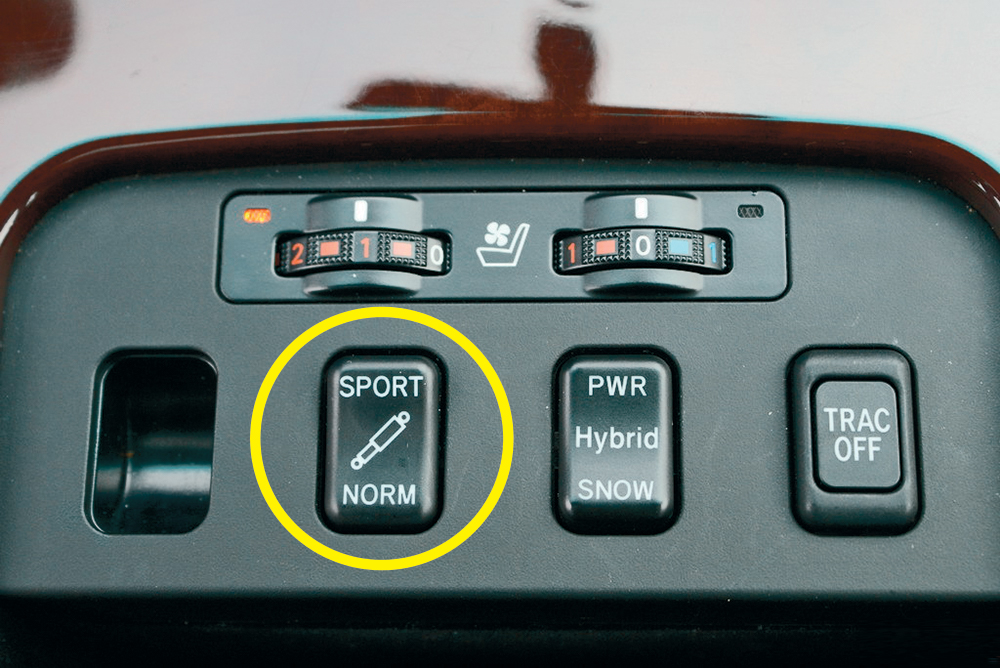
Adott feszültség érték kivezérlésekor a stabilizátorrúd-felek elfordulnak egymáshoz képest, így a stabilizátor rúd hosszanti tengelye körül nyomaték keletkezik. Ennek a nyomatéknak köszönhetően aztán a felépítményen aktív stabilizáló nyomaték ébred. A rendszer az AVS (Adaptive Variable Suspension System = adaptív lengéscsillapítás) rendszerrel együtt működik, beavatkozása során „SPORT” üzemmódba állítja azt.
A Lexus rendszerével is a BMW-jéhez hasonló menetdinamikai tulajdonságokat érhetünk el, befolyásolhatjuk az előző cikkben taglalt sajátkormányzási tulajdonságokat, és a stabilizátor rudak változtatható merevségnek köszönhetően, egyenes menetben a stabilizátor rúd-feleket akár el is választhatjuk egymástól. Minden Lexus GS450h és LS600H modellben szériafelszereltségként jelenik meg a rendszer, kivéve az oroszországi piacon, ahol ez extraként választható.
A Lexus aktív stabilizáló rendszerének elemei
Az első és hátsó tengelyekhez tartozó központi irányító egység.
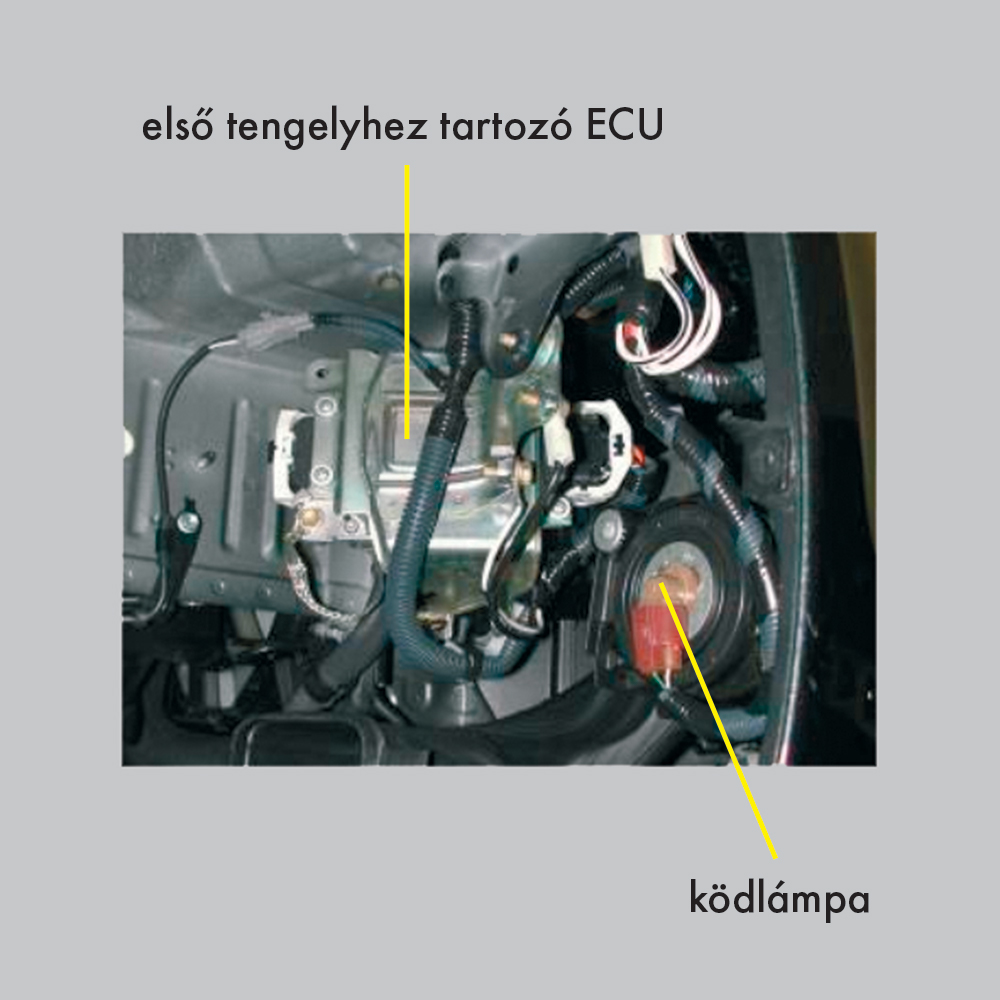

Az első és hátsó tengely aktuátoraihoz külön ECU tartozik. Az első tengely központi irányító egysége a jobb oldali ködlámpa mellett kapott helyet a lökhárítóban. A hátsó ECU, a DC-DC konverter a pótkerék tároló helyét elfoglalja, így ezek a modelleket a kerekekbe beépített vészkerékkel (run flat tire) szerelik.
Akkumulátor
A jármű csomagterében két akkumulátort találunk, a pót járműakkumulátort (S65D26L(S) min. 48 Ah) és az aktív stabilizátorok tápellátásáért felelős akkumulátort (S46A24L(S) min. 25 Ah).
Az S46A24L(S) típusú akkumulátort a DC-DC konverteren keresztül töltődik. A töltés felügyeletét az egy házba integrált töltés- és hőmérsékletérzékelő végzi. Az akkumulátor töltését kiszerelt állapotban, szobahőmérsékleten 5 Amperes áramerősség mellett végezzük. A helyes töltési idő meghatározásának érdekében digitális voltmérővel ellenőrizzük töltés előtt az akku kapocsfeszültséget. Az alábbi táblázatban foglaltuk össze az adott kapocsfeszültséghez tartozó helyes töltési időt. Soha ne töltsük az akkumulátort 10 óránál tovább! Ne használjunk hagyományos akkumulátort egyik akku helyett sem!
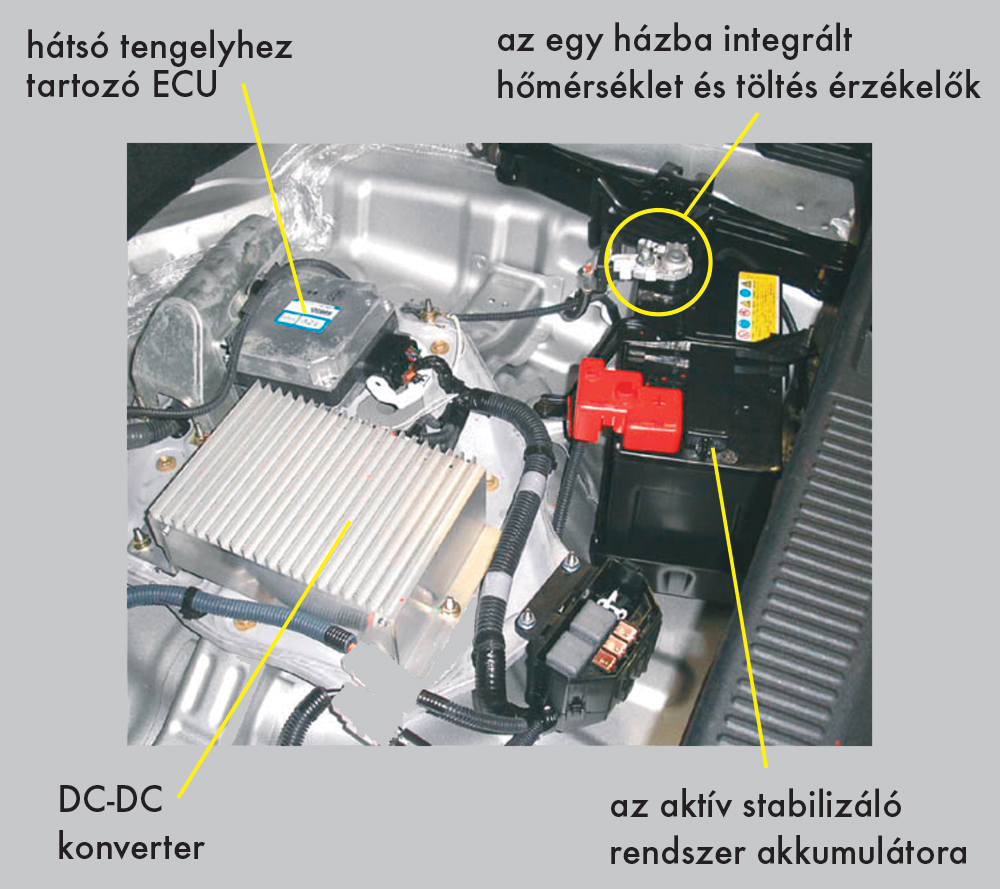
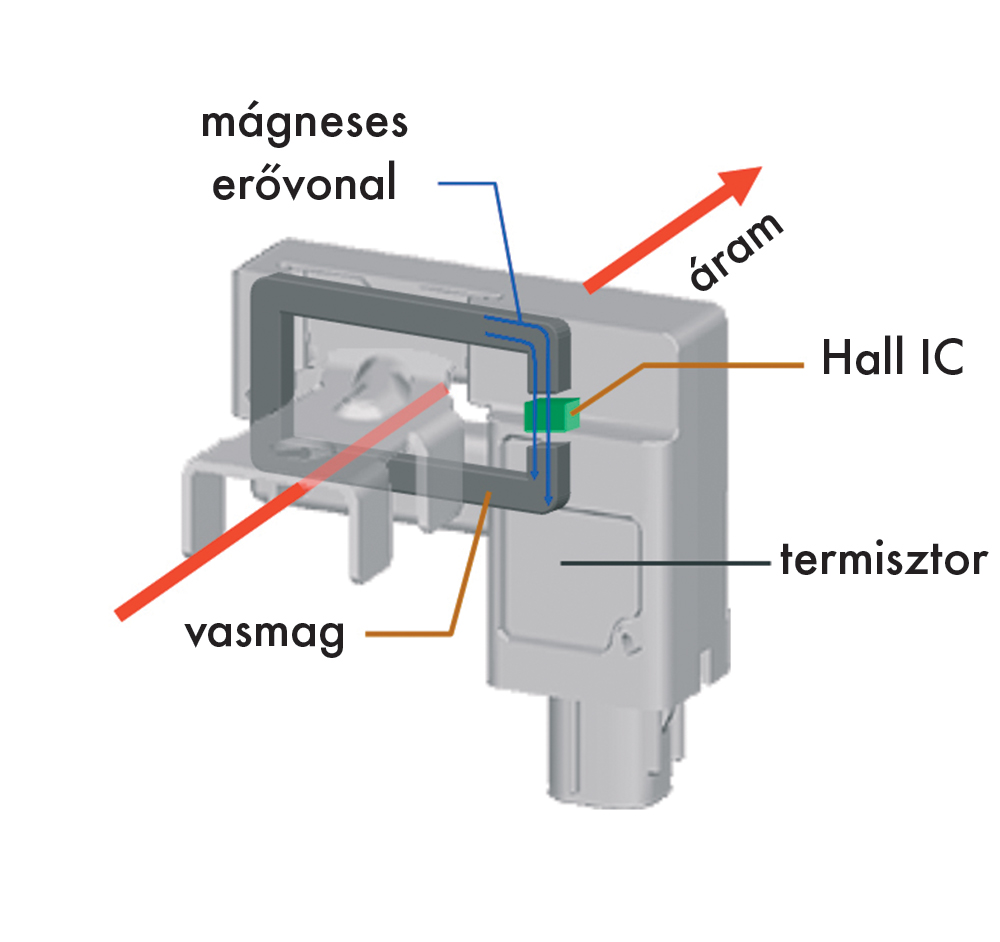
Akkumulátor töltés-ellenőrző és hőmérséklet érzékelő
Az egy házba épített szenzorok az akkumulátor negatív pólusára csatlakoznak. A Hall IC-s töltés szenzor érzékeli, hogy az akkumulátor éppen töltés alatt áll-e, vagy teljesítményt ad le éppen. Az aktuális információját elküld a hátsó tengely ECU-jának, amely alapján az irányító egység kiszámítja az akku töltöttségi fokát. Az akkumulátor belső ellenállását befolyásolja az akkufolyadék hőmérséklete. Éppen ezért a termisztoros hőmérsékletszenzor jelei alapján a hátsó tengelyhez tartozó ECU a változtatja a hőmérsékletszenzor ellenállását, védve ezzel az akkumulátort.
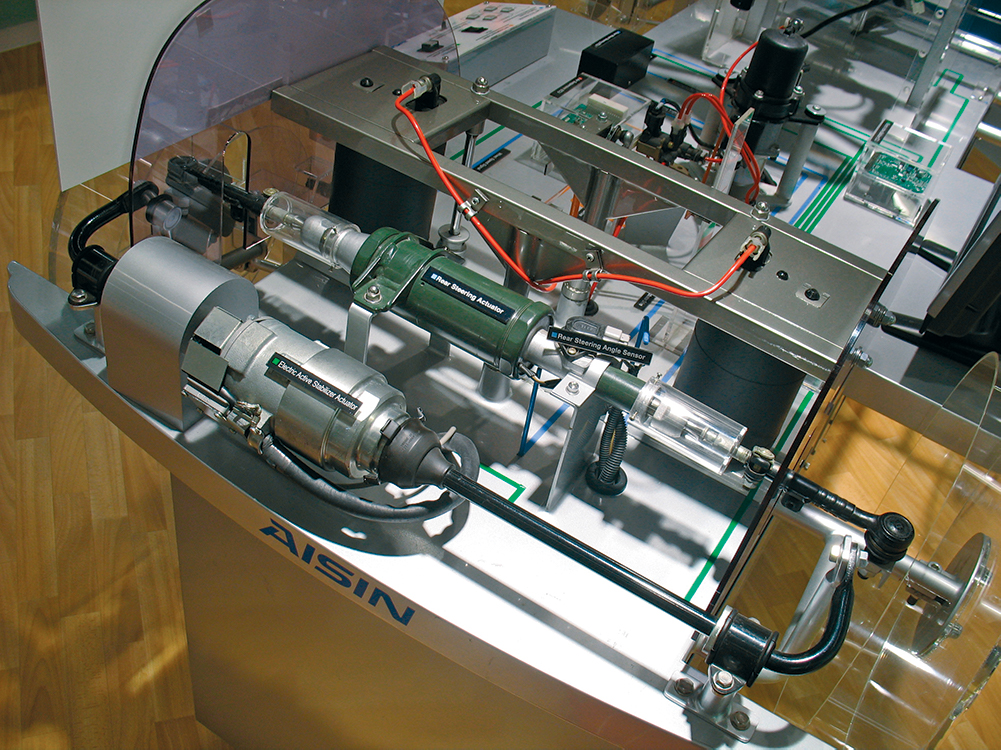
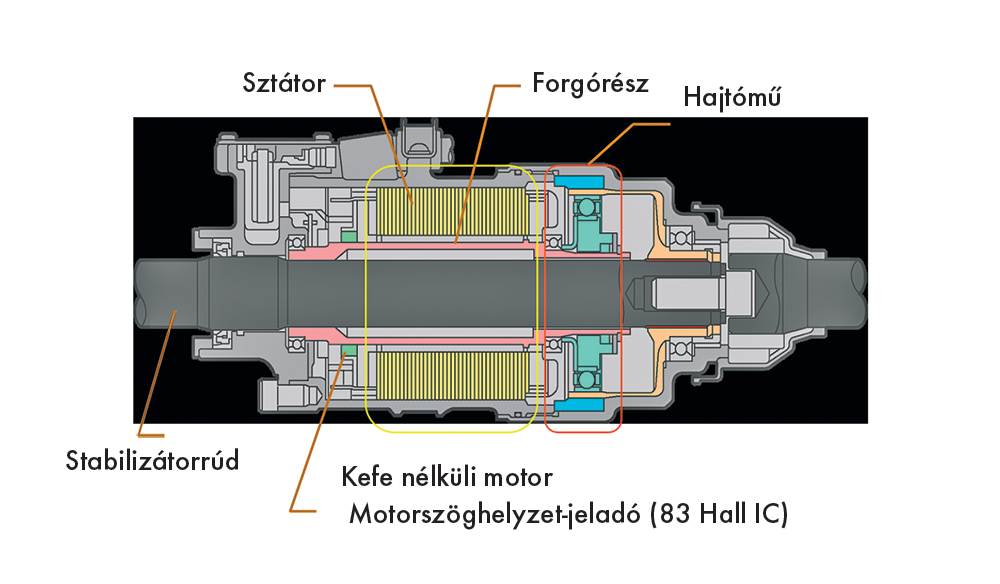
Aktuátorok
Kefe nélküli DC motor
A motor tápfeszültség ellátásáért a DC-DC konverter a felelős. Egy feszültség erősítő segítségével 12 V-ról a (maximum) 26 V-ra felerősített feszültségjellel hajtjuk a motort, melynek működési tartománya 12-26 V.
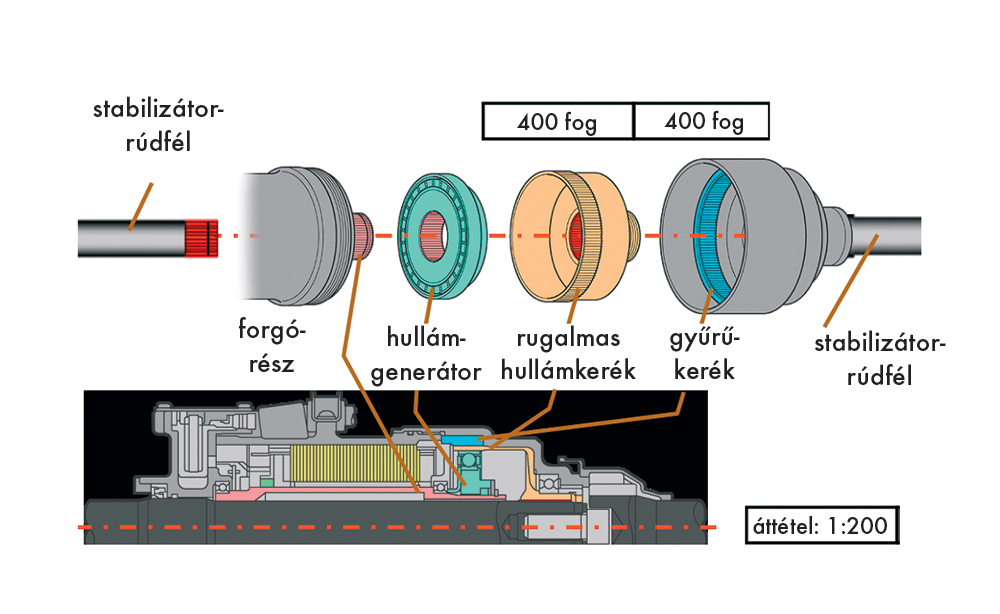
Hullámhajtómű
A hullámhajtómű (harmonic drive) nagy áttételt valósít meg, kis tömege, mérete, és kevés alkatrészszáma mellett. Tekintsük röviden ennek az elsősorban robottechnikában alkalmazott mechanizmus működési elvét!
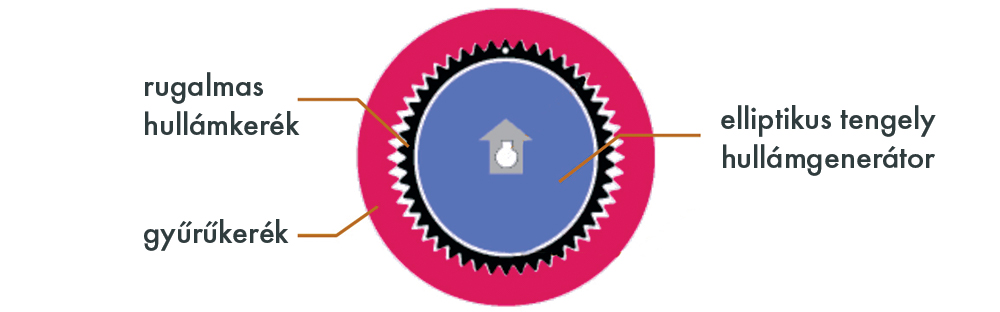
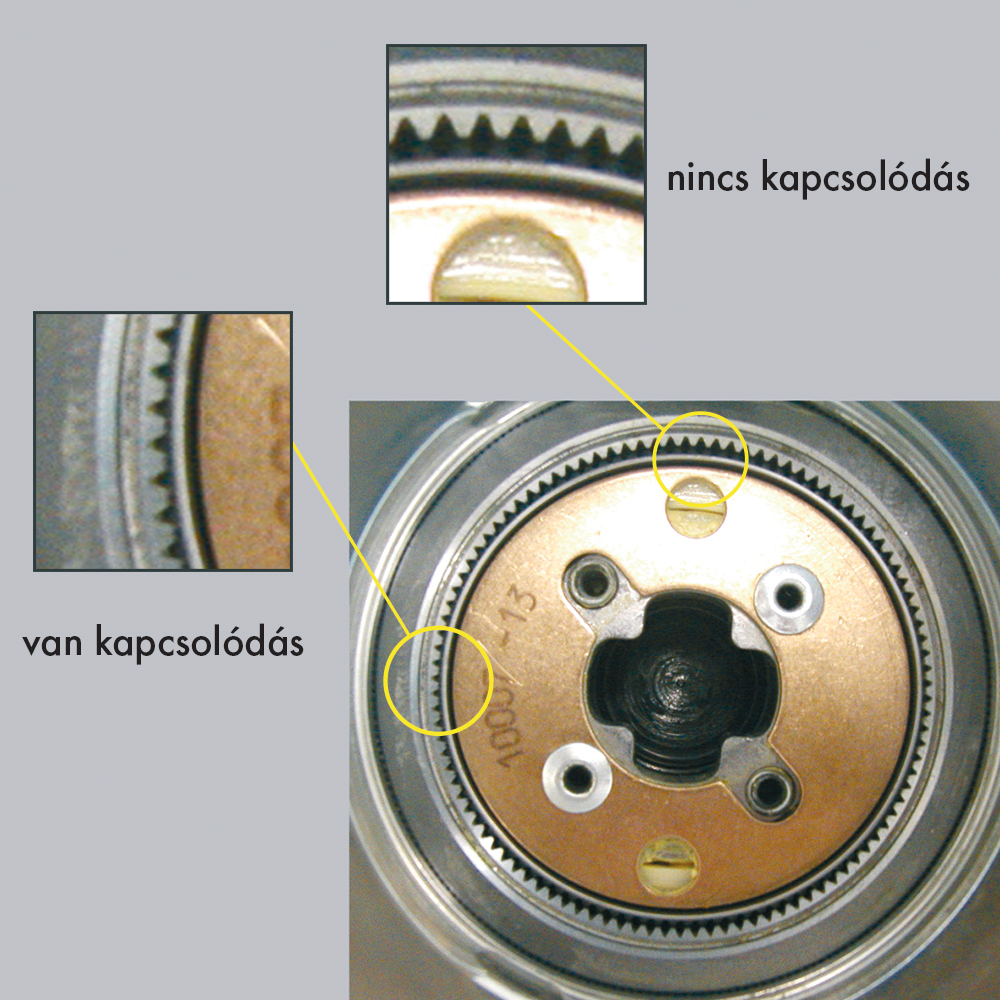
A hullámhajtómű három fő alkatrésze a hullámgenerátor (kék), a hullámkerék (fekete) és a gyűrűkerék (piros). A hullámgenerátort az egyszerűség kedvéért képzeljük el egy ovális acéltengelynek, a hullámkereket pedig egy gumiból készült külsőfogazású keréknek, melynek fogszáma esetünkben 400. Tekintsük a gyűrűkereket egy acél, belsőfogazású keréknek, melynek fogszáma 402, azaz kettővel több, mint a flexibilis hullámkeréké. A hajtómű bemenete a hullámgenerátor. Rögzítsük gondolatban a belső fogazású gyűrűkereket! Ahogy forgatjuk a hullámgenerátort, az a hullámkerék fogait sorba belepréseli a gyűrűkerék fogai közé. Mivel a hullámkerék fogszáma kettővel kisebb, mint a gyűrűkeréké, nyilvánvaló, hogy a hullámgenerátor egyszeri körbefordulásának eredményeképpen a hullámkerék 2 fognyit elfordul. A hajtás kimenete a hullámkerék. A mechanizmus ellentétes értelmű forgást hoz létre. A harmonikus hajtással a gyakorlatban 1:200 maximális áttételt szokás megvalósítani. A mechanizmus korlátja a kimenő nyomaték nagysága, amely rendkívüli igénybevételt jelent a hullámkerék anyagának.
Biztonsági mód
Az aktuátor egység belsejében található a motort „reteszelő” relé, amely a rendszer meghibásodása esetén aktívvá válik, azaz nem engedi a két stabilizátorrúd-felet elfordulni egymáshoz képest. Mindezt egyszerűen úgy éri el, hogy a DC motor kivezetéseit rövidre zárja, a motor elforgatása szinte „lehetetlenné” válik.
Egy kis diagnosztika…
A rendszermemória tárolja az üzem közben fellépő hibákat DTC (Data Trouble Code) formájában. A vezetőt a műszerfalon elhelyezett visszajelző lámpa és a „multifunkciós kijelzőn” megjelenő „CHECK ACT.STABI.” felirat figyelmezteti arra, hogy meghibásodás állt elő a rendszerben.
Gyári, Toyota rendszerteszterrel természetesen egyszerűen ki tudjuk olvasni a hibakódokat, de ha van alternatív megoldás, akkor miért ne élnénk vele.
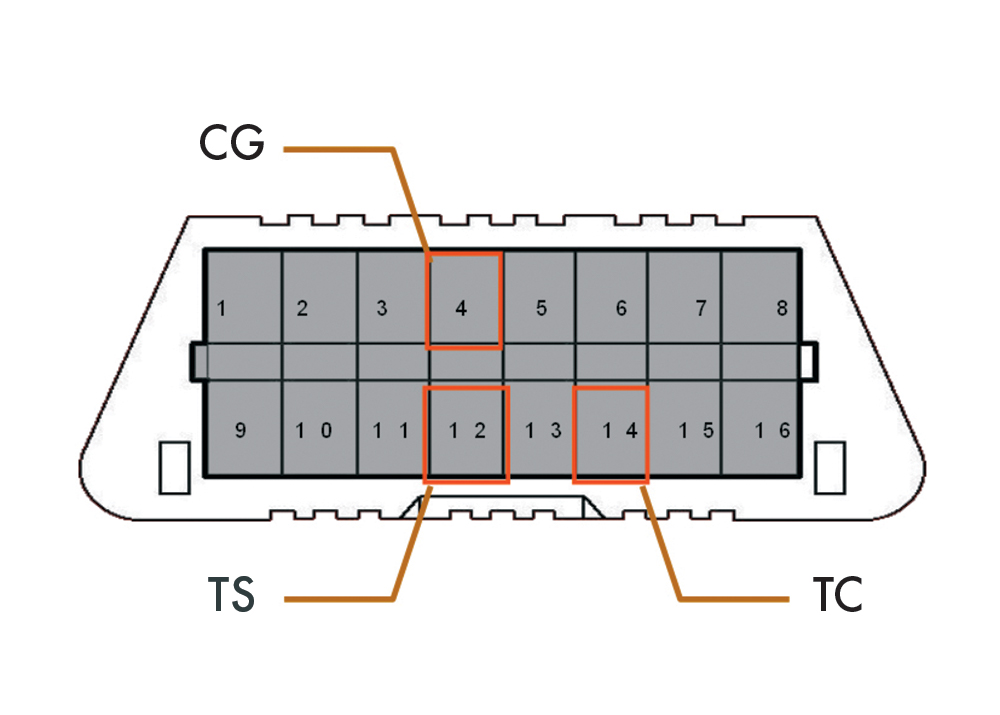
A DLC3-as (Data Link Connector) csatlakozó 4-es (CG) és 14-es (TC) pinjére csatlakoztassuk a hibakód kiolvasónkat. Amennyiben ezt a két pint rövidre zárjuk - a megfelelő biztosíték közbeiktatásával – a multifunkciós kijelzőn leolvashatjuk a hibakódot.

A DTC-k törléséhez használjuk a jó öreg rövidre záró vezetéket, mellyel most a 4-es (CG) és a 12-es (TS) pineket zárjuk rövidre és kövessük a következő procedúrát.
1. kétszer kapcsoljuk az adaptív lengéscsillapítás állító gombját „NORM” állásból „SPORT” állásba.
2. Nyomjuk be a fékpedált!
3. Ismételt meg ezt a procedúrát háromszor, de egy-egy fázis 5 másodperc alatt zajlódjon le!
Ha sikeresen elvégeztük a hibakód(ok) törlését, akkor a kijelzőn eltűnik a felirat és a rendszerhiba visszajelző lámpa elalszik.
A soros rendszerteszterekkel kiolvasható élő adatblokk 18 paramétert tartalmaz.
1. Jármű sebesség (MPH)
2. Első, jobboldali kerék sebesség (MPH)
3. Első, baloldali kerék sebesség (MPH)
4. Hátsó, jobboldali kerék sebesség (MPH)
5. Hátsó, baloldali kerék sebesség (MPH)
6. Motorfordulatszám (min -1)
7. Elkormányzási szög (fok)
8. Legyezési szögsebesség1 (yaw rate) (rad/s)
9. Legyezési szögsebesség2 (yaw rate) (rad/s)
10. Oldalgyorsulás (m/s2)
11. Hosszirányú gyorsulás (m/s2)
12. Első stabilizátorrúd-felek elfordulási szöge (fok)
13. Hátsó stabilizátorrúd-felek elfordulási szöge (fok)
14. Első stabilizátorrúd-felek elfordításához szükséges nyomaték (Nm)
15. Hátsó stabilizátorrúd-felek elfordításához szükséges nyomaték (Nm)
16. Feszültség gyújtáskor (V)
17. Feszültség gyújtás után (V)
18. DTC-k száma
A műszerfal multifunkciós kijelzőjén az alábbi táblázatban összefoglalt üzenetek jelenhetnek meg.


