Egyedi hátsókerék-kormányzás
A gépjárműtechnika megvalósított szerkezetei, de még a csak felvetett, de reális lehetőségek sora sincs tekintettel a tankönyvek csoportosításaira, besorolásaira. Előbbre járnak az iskolánál, ezek szerint „hivatalosan” még nincsenek is…
Tipikusan „előrerohanós” műszaki terület a gépjárművek kormányzása. Lassító erőt sok országban a talán túl óvatos közlekedési engedélyező hatóság fejt ki, mely nem ad forgalomba állítási engedélyt, ha szerinte egy szerkezettel kapcsolatban forgalombiztonsági kétely merül fel. „Jobb félni, mint megijedni” – mondja a magyar közmondás is, így tehát egyelőre többen még elutasítanak minden olyan műszaki megoldást a kormányzásban és a fékezésben, ahol nincs folyamatos mechanikus, hidraulikus vagy pneumatikus kapcsolat a vezérlés és a beavatkozás között.
A kéttengelyű, alvázas vagy önhordó kocsiszekrényű gépjármű első tengelye kerekeinek ún. Ackermann-kormányzása a múlt század legelején alapvetően megoldotta az autó kormányzási igényét. Úgy tűnt, mindörökre. Ahová azonban mérnök beteszi a tervezőasztalát, ott mindig formálódnak a dolgok…
Hamar elkészült az első összkerék-kormányzású autó, pontosabban mindkét tengely kerekeit kormányozták Ackermann-rendszerben, az első kerekek kormányrudazatához csatolt rudazattal. Nézzünk egy szép példát a korai időkből. A Daimler-Motoren-Gesellschaft (DMG) „Dernburg-Wagen” gépkocsija 1907-ben, 107 évvel ezelőtt volt a márka első összkerékhajtású és 4-kerék kormányzású autója ➊. A cél egyértelműen a fordulékonyság növelése, tehát a hátsó kerekek elkormányzása az Ackermann-geometria szerint az első kerekek elkormányzásával ellentétes irányban történik.
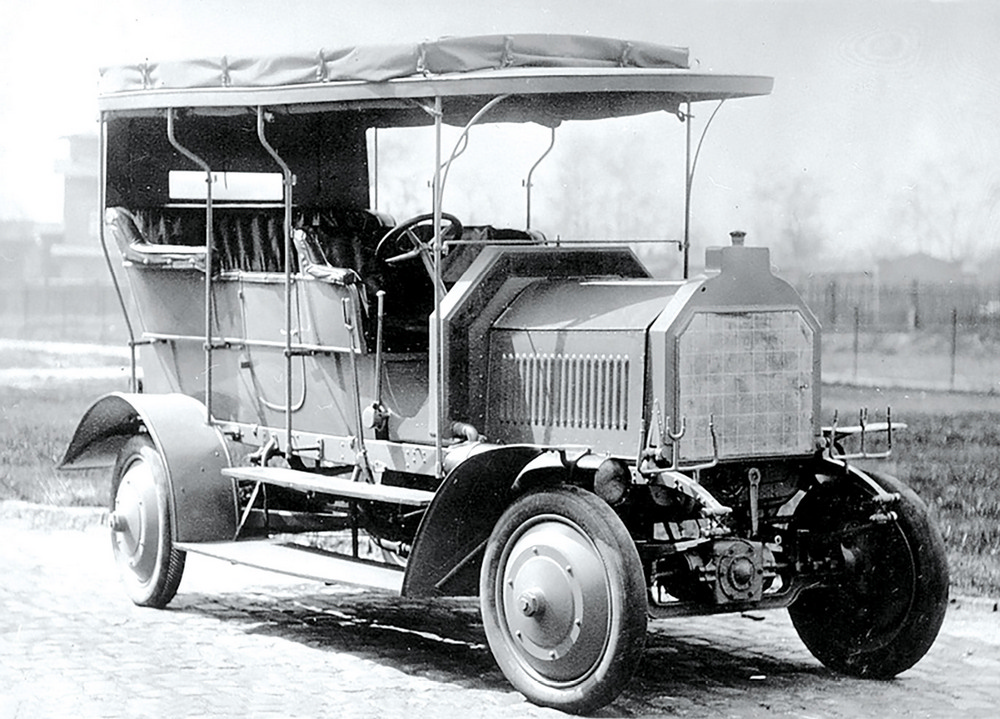
➊
(Nem témánk, de megemlítjük, a csuklós buszok C tengelyét is rudazattal kormányozzák – nem mindegy, hogy B-tengely hajtású vagy tolócsuklós! – a fordulékonyság végett, általában a csuklómechanizmus mozgásához kötve.)
A VILLAMOS TENGELY
Napjaink újdonságát az jelenti, hogy a kormánymechanizmus teljes erőátviteli láncában – a kormánykeréktől a kerékig – nincs folyamatos mechanikai kapcsolat. Magyarul szólva: villamos tengely köti össze a vezérlést és a beavatkozót. A villamos tengelyt ma X-by-wire (ejtsd: ikszbájvájer) módon jelölik, ahol „X” az adott szerkezet, illetve funkció helyett áll. Lehet „Steer-by-wire” (kormányzás mechanikus kapcsolat nélkül – vezetéken keresztüli kormányzás), „Brake-by-wire” (fékezés mechanikus/hidraulikus kapcsolat nélkül). A motor gázpedál mozgatása már régen „E-gas”, nincs bowdenhuzal, és nem is gázpedál, hanem egy nyomatékigényt beállító jeladó.
A közúti engedélyezőket sok országban az nem „hatja” meg, hogy a repülőgépiparban már régen nincs mechanikus vagy hidromechanikus erőátviteli kapcsolat, nem mennek bowdenhuzalok a pilótafülkéből a vezérsíkokhoz. Ott már minden „X-by-wire”, azaz „Fly-by-wire”.
A KORMÁNYZÁS LEHETŐSÉGEI
Ezek után a „steer-by-wire” lehetőségeit is figyelembe véve, tekintsük át a kormányzási lehetőségeket!
1. Tengelykormányzás
Az ősi technika a szekerek világából ered, ez a tengely- (forgózsámoly) kormányzás, a kerekek a tengelyhez képest nem fordulnak el. Pótkocsiknál ilyenre ma is van példa. Lehet mindkét tengelynél, és lehet egymással kapcsoltan is. Az I. világháború idején a katonai szállítójármű-szerelvények (országúti vonatok) voltak két forgózsámolyosak.
2. A kerék elkormányzásának lehetőségei
2.1. Kapcsolt, egymással rudazati mechanizmussal összekötött, tengelyenkénti kerékelfordítás (tengelycsonk-elfordítás) az ún. Ackermann-geometria szerint,
A hátsó tengely kerekei is lehetnek kapcsolt kormányzásúak, az első tengely kormányzásával lehet rudazattal összekötött és lehet villamos tengellyel összekötött (villanymotorral állított rudazatú).
2.2. Egyedi kerékelfordítás. A kerekek elfordítása kerekenkénti beavatkozóval (állítómotorral) történik, egymástól függetlenül.
2.2.1. Csak a hátsó tengely kerekei egyedi kormányzásúak,
2.2.2. mind a négy kerék egyedi kormányzású.
ELSŐKERÉK-KORMÁNYZÁS
Az elsőkerék-kormányzás beavatkozója (működtetője) lehet emberi erő bemenetű hajtómű (kormánygép), mely állandó mechanikai kapcsolatú összeköttetést jelent. Kiegészülhet nyomatékrásegítéssel (szervohatás) és kimeneti kerékelfordítás-korrekcióval. Ez áttételváltozást, elfordítási szög növelést vagy csökkentést jelent a kormánykerék bemeneti szögelfordításához képest, illetve ezzel ellentétes értelmű elfordítást is adhat. Mindezt intelligens korrekciós (szuperponáló) elsőkerék-kormányzás névvel is azonosítják.
A kapcsolt elsőkerék-kormányzás beavatkozója (működtetője) lehet villanymotor, mely általában fogasléces kormánygéphez kapcsolódik. A bemeneti jelet a kormánykerék-elfordítás adja, melyet számos tényezővel korrigálnak. A kormánykerék és a kormánygép között nincs mechanikai kapcsolat, csak villamos tengely. Az elektromos rendszer meghibásodásakor rendkívül gyorsan összezáródó (< 0,1 s) mechanikus kapcsolat jön létre a kormánykerék/kormánytengely és a kormánygép között.
Az egyedi elsőkerék-kormányzás beavatkozója kerekenként egy-egy villanymotoros aktuátor.
HÁTSÓKERÉK-KORMÁNYZÁS
A hátsó tengely kerekeinek elfordítása lehet
1. az első kerekek elfordításával azonos értelmű. Rudazattal összekötött, a kormánykerék elfordításával meghatározott. Ez a hagyományos összkerék- (4-kerék) kormányzás. Személygépjárműveknél ma már nem alkalmazzák.
2. kapcsolt (trapéz összekötő villanymotoros mozgatásával), az első kerekek elfordításával azonos, vagy ellentétes értelemben. vagy
3. egyedi módon (tengelycsonk egyedi beavatkozókkal történő, közvetlen elfordításával), az első kerekek elfordításával azonos vagy ellentétes értelemben.
A 2. és 3. eset a korrekciós hátsókerék-kormányzás lehetőségét valósítja meg. A korrekciós kapcsolt hátsókerék-kormányzás egy alkalmazását részletesen ismertettük az Autótechnika 2008/6. p. 24–26. számában. Ezt a technikát számos autógyár sportkocsikon vagy a felső kategóriás gépjárművein alkalmazza. A BMW-nél „Integral-aktív Kormányzás” az F01-es hetesnél jelent meg, 2009-ben. Ennek hátsókerék-kormányzása kapcsolt, állítómotorját a hátsó híd középrészénél helyezték el.
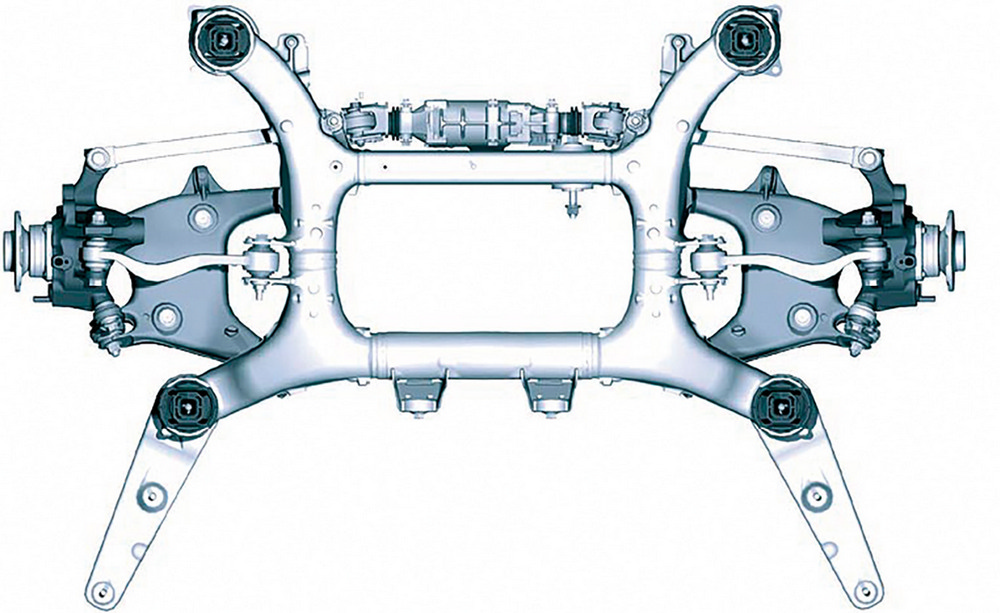
➋
Az elektromechanikus beavatkozó-elem villanymotorja egy orsós hajtóművön keresztül mozgatja a két nyomtávrudat. A beavatkozóelem maximális lökete ± 8 mm, ami ± 3° maximális kerékelfordulást eredményezhet. A hátsókerék-kormányzás orsós hajtóműve önzáró, ennek következtében a gépkocsi a rendszer meghibásodása esetén egy hátsókerék-kormányzás nélküli gépkocsival azonos menettulajdonságokkal rendelkezik ➋, ➌.
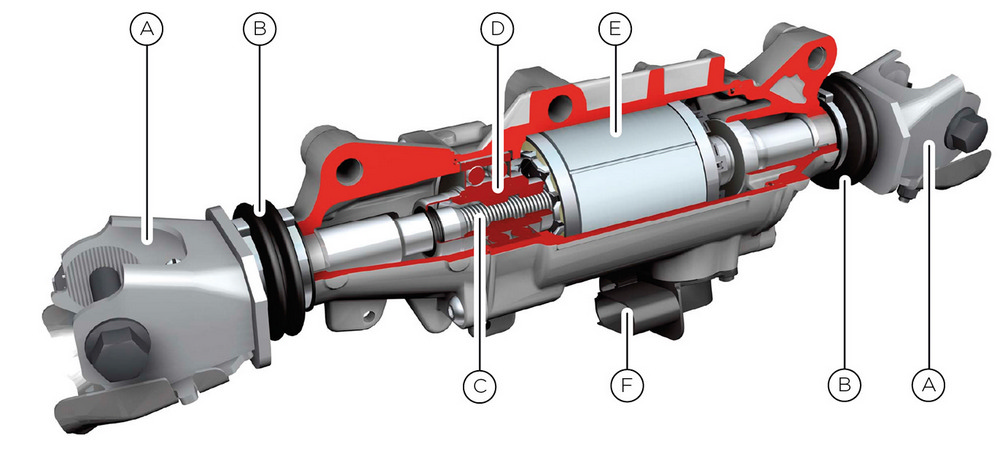
➌ A – kormányösszekötő rúd csatlakozás, B – porvédő gumiharang, C – csavarorsós hajtómű, D – orsóanya, E – villanymotor, F – elektromos csatlakozó
EGYEDI HÁTSÓKERÉK-KORREKCIÓS KORMÁNYZÁS
Ha a két hátsó kereket egymástól függetlenül, külön-külön lehet elfordítani, kormányozni, az autó ívmeneti mozgásában, annak befolyásolásában és menetdinamikájában is új lehetőségek nyílnak meg. Ezt a technikát már több beszállító ajánlja és több gyártó alkalmazza (Honda Acura, Nissan Infiniti, Porsche 911 GT3).

➍
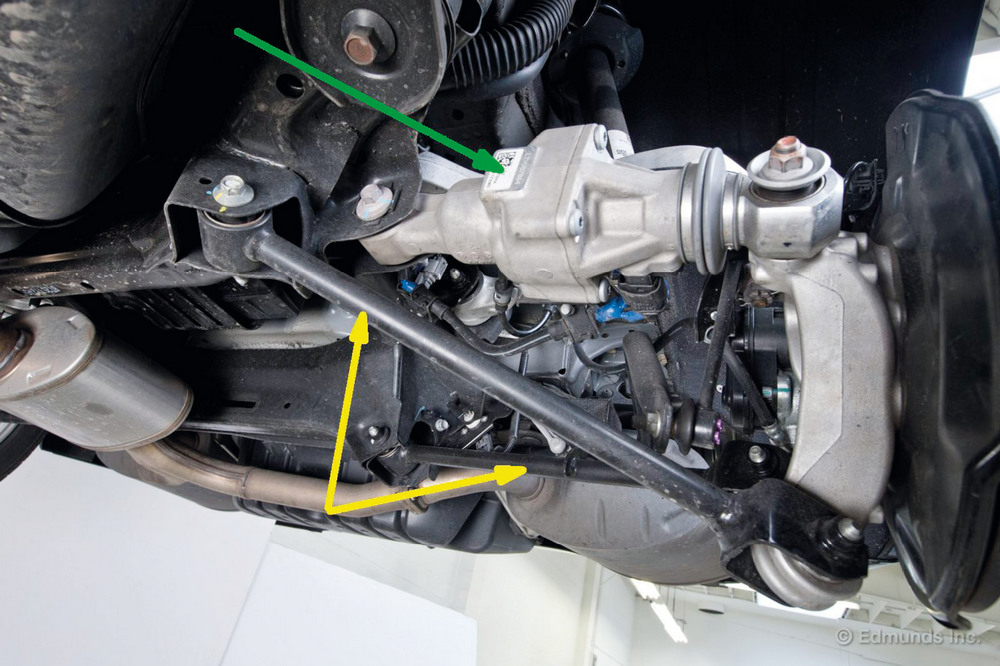
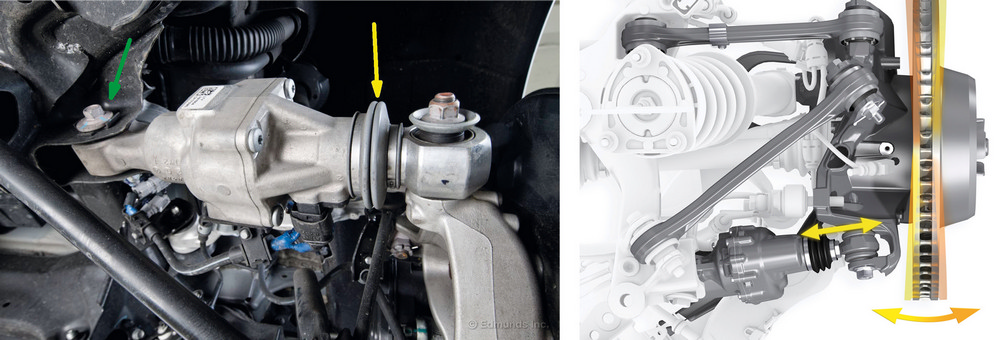
A rendszert a Honda (Acura) RLX-modelljén mutatjuk be. A kormányzás gyári megnevezése Precision All-Wheel Steering, rövidítése PAWS. Az Acura hátsó futóműve ún. multilink (térbeli többkarú) típusú. A tengelycsonkok csak kismértékben (2 fok maximum) tudnak elfordulni a lengőkarokhoz képest. Mindkét oldalon egy-egy aktuátor, elektromos motorral mozgatott csavarorsó fordítja el a kerekeket, a ➍. ábrán zöld nyíl jelöli, a sárga nyíl az alsó lengőkarokat mutatja.
➎
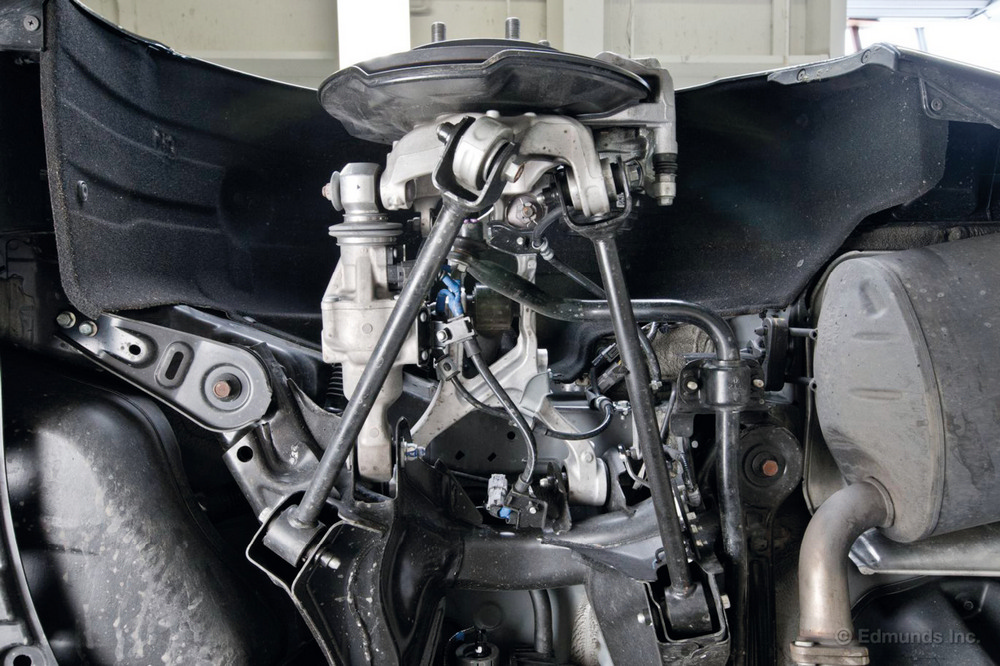
Az ➎. ábrán alulról látható a hátsó futómű. A csavar- orsókon van egy elmozdulásérzékelő, hogy pontos visszajelzést kapjon az irányítóegység. Az ECU a két aktuátort egymástól teljesen függetlenül tudja mozgatni. Az ECU egy sor érzékelő jele alapján dönti el, hogy milyen irányba és mennyire fordítsa el a kerekeket, befolyásoló tényezők: az első kerekek bekormányzási szöge, oldalgyorsulás, hosszirányú gyorsulás, gázpedálállás, fékpedálállás, kerék- és járműsebesség, berugózás mértéke. Ezek alapján az ECU azt is kiszámolja, hogy mekkora terhelés van az adott keréken. Azért nagyon fontos ez, mert ha egyforma erővel próbálnánk elfordítani a két kereket, akkor a kevésbé terhelt gyorsabban elérné a kívánt helyzetet, ezzel instabillá tenné az autót. Ezért egy-egy korrekciós áramkör révén az aktuátorok áramait tudják változtatni, hogy azonos sebességgel mozogjanak.
➏ ➑
Az egész rendszer körülbelül 6,5 kilogrammot ad az autó tömegéhez. Az Acura úgy számol, hogy ennek nagyjából a fele számít bele a rugózatlan tömegbe. Ha állítani kell a futóművön az összetartást, akkor azt a hagyományos módon, egy excenter segítségével lehet a csavarorsó alváz felőli végén (➏. ábra zöld nyíl) megtenni.
A többi hátsókerék-kormányzású autóhoz hasonlóan, kis sebességnél az Acura is az első kerekekkel ellentétes irányba fordítja a hátsókat, hogy csökkentse a fordulókört, nagy sebességnél pedig azonos irányba, csak kisebb mértékben, így növelve a stabilitást. Ezzel a tényleges menettengely irányát változtatják a kocsiszekrény szimmetriatengelyéhez képest. A mérnökök kihasználták, hogy független a két oldal állítása; fékezésnél összetartóra állítja a rendszer a hátsó kerekeket, növelve a stabilitást, gyorsításkor pedig széttartóra, ugyanebből az okból. (Lásd a videót!) Kanyarban fékezésnél különösen előjönnek a független állíthatóság előnyei. A rendszert ezért összetartás-módosítónak is nevezik. Hátramenetben a rendszer nem működik, mert korábban panaszkodtak a vásárlók, hogy nagyon furcsa érzés tolatni egy ilyen rendszerrel.
➐
A Porsche 911 GT3 csúcsmodellje is rendelkezik egyedi hátsókerék-korrekciós kormányzással. Két ábrán ➐, ➑ tanulmányozhatjuk ennek a szerkezetét.