
Continental Teves féktechnikai fejlesztései
Már hagyományosnak mondható, hogy a Budapesti Műszaki és Gazdaságtudományi Egyetem egykori hallgatója, Schiel Lothar, a Continental Teves vállalat fejlesztőmérnöke előadást tart a Gépjárművek és Járműgyártás Tanszéken az egyetemi hallgatóknak, akik így évről évre a személygépkocsik legújabb féktechnikai fejlesztéseivel ismerkedhetnek meg.
Az előadó rövid személyes bemutatkozás után a bevezetőben bemutatta a Continental-konszernt, ismertette, hogy mely autógyárak első beszállítója. Megtudhattuk, hogy ma 22 országban, 64 telephelyen folyik a gyártás. Ebbe természetesen hazánk is beletartozik, így kicsit bővebben szó esett a magyarországi vállalatokról is.
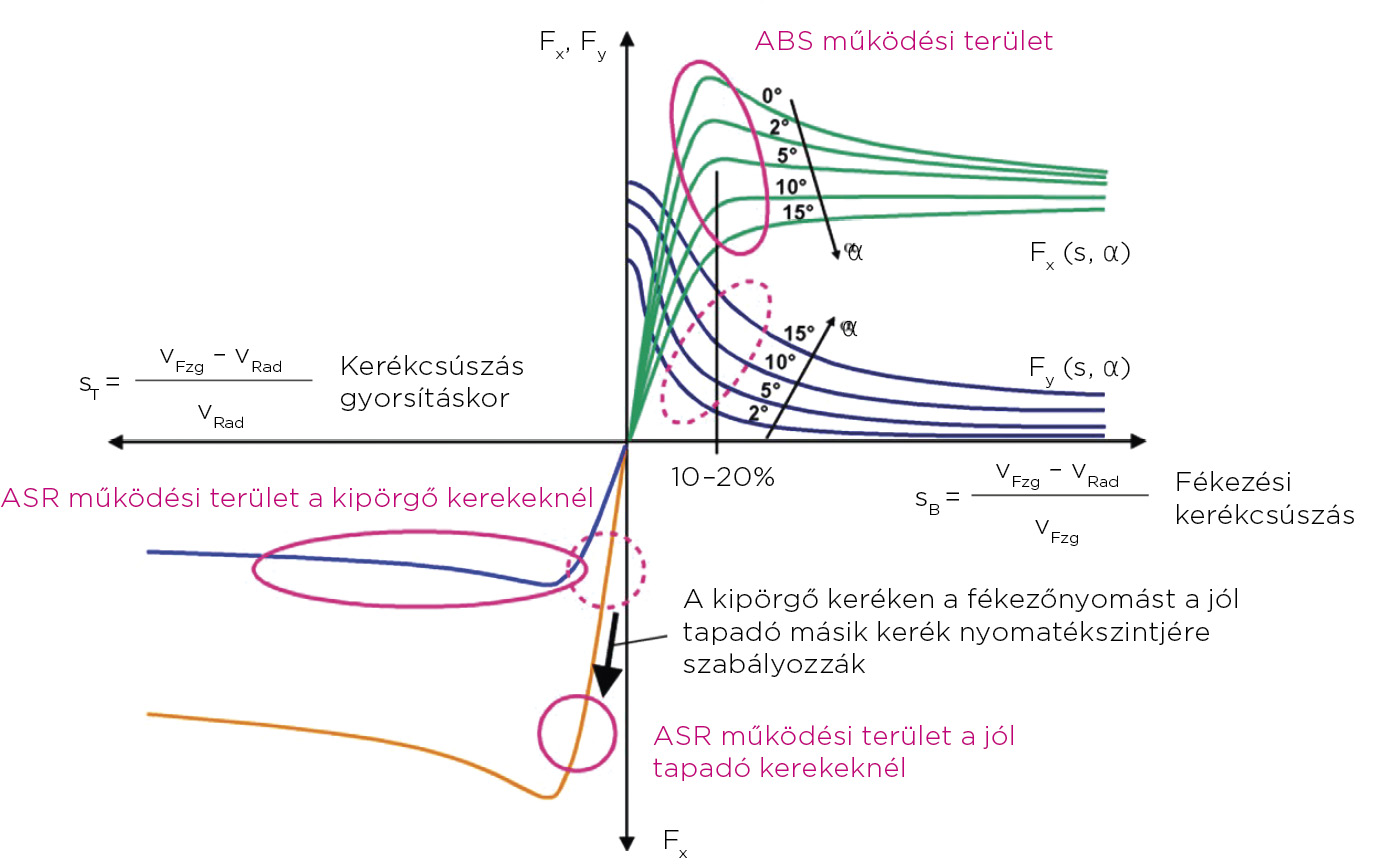
➊ Az ABS és az ASR működési tartományai a kerékcsúszás függvényében.
A Continental Teves vállalat két jelentős eseményt is ünnepelt 2013-ban. Májusban készült el az 50 milliomodik blokkolásgátló és egy hazai vonatkozás: már tíz éve működik a veszprémi gyárban a fejlesztési központ. A cikk előző részében részletesen tárgyalt blokkolásgátló gyártása a vállalatnál 1998-ban kezdődött. Az elmúlt időszakban jelentős volt a fejlődés. Ugyanis az első ABS, az MK II típus még 11,5 kg volt, és akkor még csak az exkluzív gépkocsikba szerelték be. A jelenleg gyártásban lévő MK60 típusú blokkolásgátló tömege viszont csupán 2 kg. A felületre szerelt, úgynevezett SMT-technológiával gyártott elektronika már a hidraulikaegység részét képezi, kapacitása és működési sebessége a kezdetek óta a többszörösére növekedett. Jelenleg szinte már alaptartozékká vált a személygépkocsikban a blokkolásgátló. A folyamatos fejlesztéseknek köszönhetően összetett menetdinamikai szabályozó rendszerré vált.
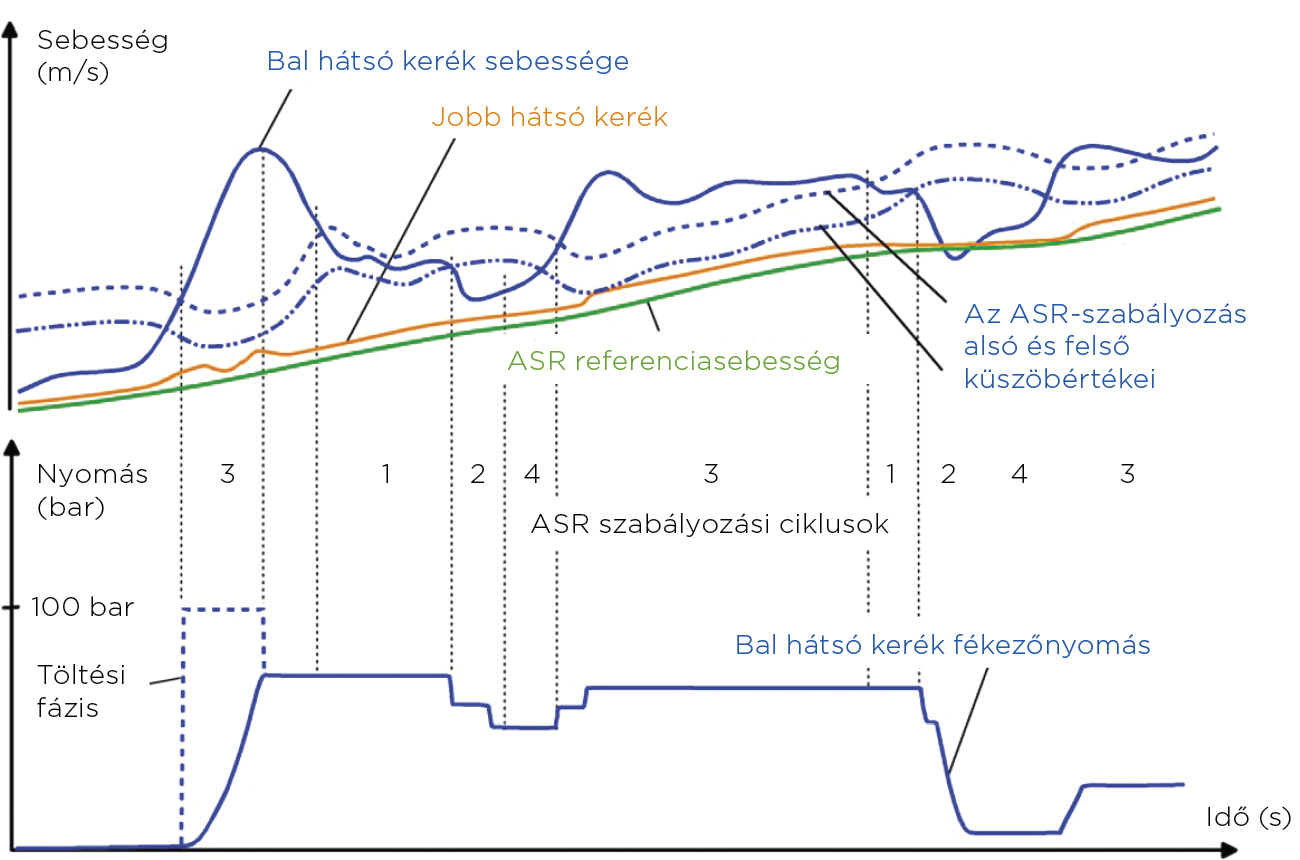
➋ Az ASR működése, amikor a bal és a jobb oldalon jelentősen eltér a tapadási tényező
A kezdetek óta kifejlesztett további újabb menetdinamikai szabályozó rendszerek közül szinte mindegyiknek az alapja a blokkolásgátló rendszer. Az ABS utáni első jelentősebb továbbfejlesztés az ASR, vagyis a kipörgésgátló volt. Ez elinduláskor és gyorsításkor javítja a gépkocsi hosszanti dinamikáját.
A KIPÖRGÉSGÁTLÓ (ASR) MŰKÖDÉSI ELVE
Erre a menetdinamikai szabályozó rendszerre azért van szükség, mert a hagyományos differenciálművel szerelt gépkocsiknál, amikor a bal és a jobb oldali hajtott kerekek alatt a tapadási tényező jelentősen eltér, csak nagyon kis vonóerő valósulhat meg. Vannak esetek, amikor ilyen körülmények között a gépkocsival el sem lehet indulni. Ennek az oka az, hogy a differenciálmű fele-fele arányban osztja szét a nyomatékot, és ha az egyik hajtott kerék kipörög, csúszik, a másik sem képes vonóerőt átvinni. Ilyenkor az ASR-rendszer a vezetőtől függetlenül aktív, és szabályozott fékezéssel avatkozik be. Hatására a gépkocsi el tud indulni, és utána stabil gyorsításra is képes.
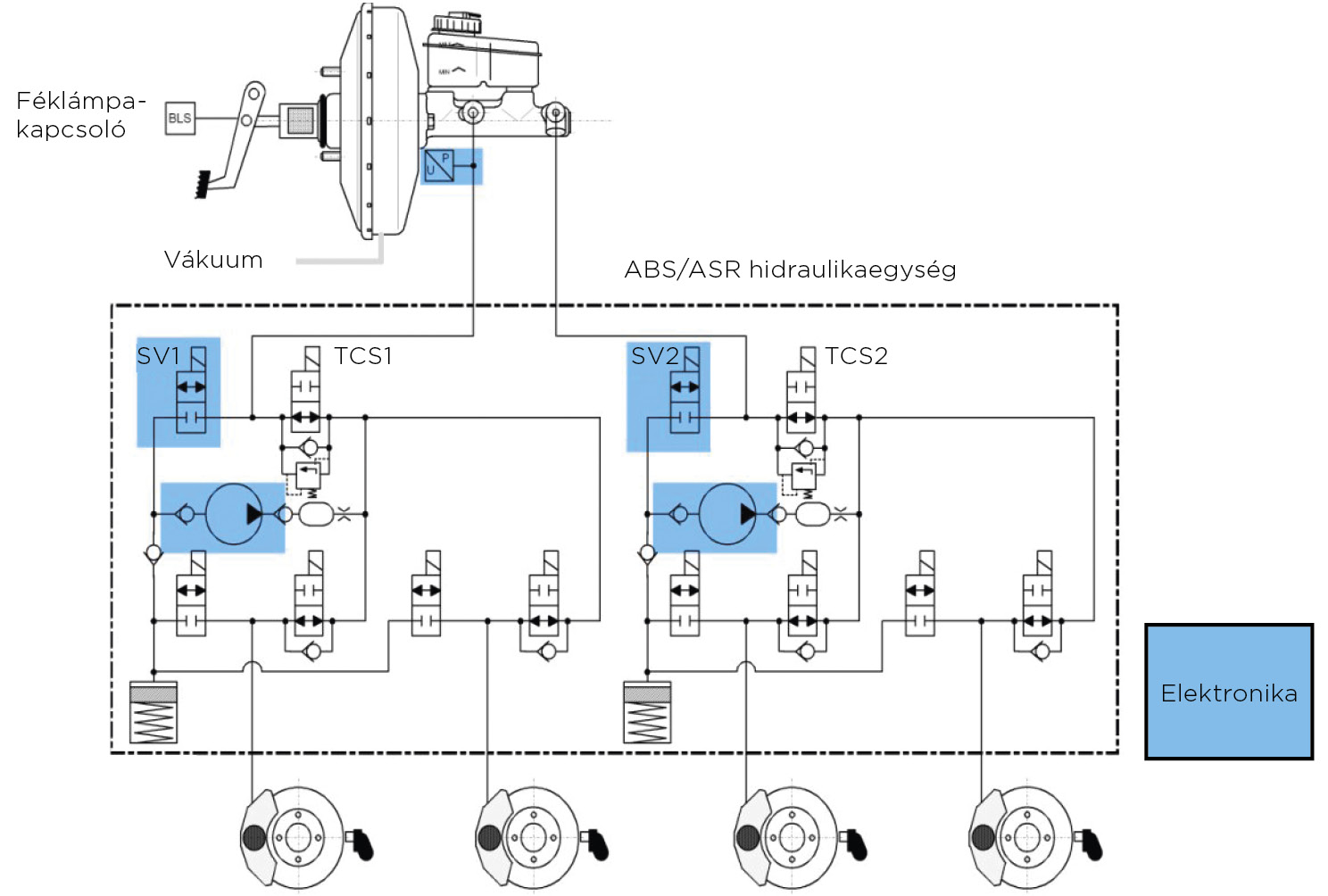
➌ Az ASR hidraulikaegység felépítése
Ezt a beavatkozást csak 40 km/h sebességhatárig alkalmazzák, mert nagyobb sebességnél stabilitásvesztés következhet be. Ezért ilyenkor a motor nyomatékát csökkentik. Az ABS/ASR elektronika ilyenkor a CAN-hálózaton keresztül küld parancsot a motorelektronikának a hajtónyomaték csökkentésére. Ennek is jelentős stabilizáló hatása van a gépkocsira. A blokkolásgátlót kiegészítő kipörgésgátló (az ASR) különösen csúszós utakon támogatja hatékonyan a vezetőt.
A KIPÖRGÉSGÁTLÓVAL KAPCSOLATOS ELNEVEZÉSEK
A szakma ezzel a menetdinamikai szabályozóval kapcsolatosan sokféle elnevezést és rövidítést használ. Az ASR például a német Antrieb Schlupf Regelung elnevezésből származik. Ugyanezt angolul Traction Control System-nek nevezik és a TCS rövidítést használják. A motor hajtó nyomatékának csökkentését, illetve leszabályozását Engine Traction Control-nak nevezik és ETC-nek rövidítik. A vonóerő-átvitel kihasználásának a javítására használják kis sebességnél a Brake – Lock Differential kifejezést (BLD). Motorfék használatakor (tolóüzem) a szabályozást Engine Dragtoque Controlnak nevezik, amit EDC-nek rövidítenek.
Mindkét oldalon a túlpörgő kerék nyomatékszintjére szabályoz az elektronika az ETC-beavatkozás révén. Ez hatékonyan növeli a gépkocsi menetstabilitását.
Amikor az útfelület két oldalán jelentősen eltérő a tapadási tényező, irányított nyomatékelosztás (torque vectoring) valósul meg. Ez különösen a nagyobb tapadási tényezőnél, illetve kanyarban 0–100 km/h közötti sebességtartományban valósul meg.
ESP – ELECTRONIC STABILITY PROGRAM
A címben is olvasható elnevezésen kívül használatos még ugyanerre a menetdinamikai szabályozó rendszerre az Electronic Stability Control elnevezés is, és az ebből származó ESC rövidítés. Más megnevezések: DSC (BMW) Dynamic Stability Control, VSC (Toyota), Vehicle Stability Control, VDC (Alfa Romeo), DSTC (Volvo) Dynamic Stability and Traction Control.
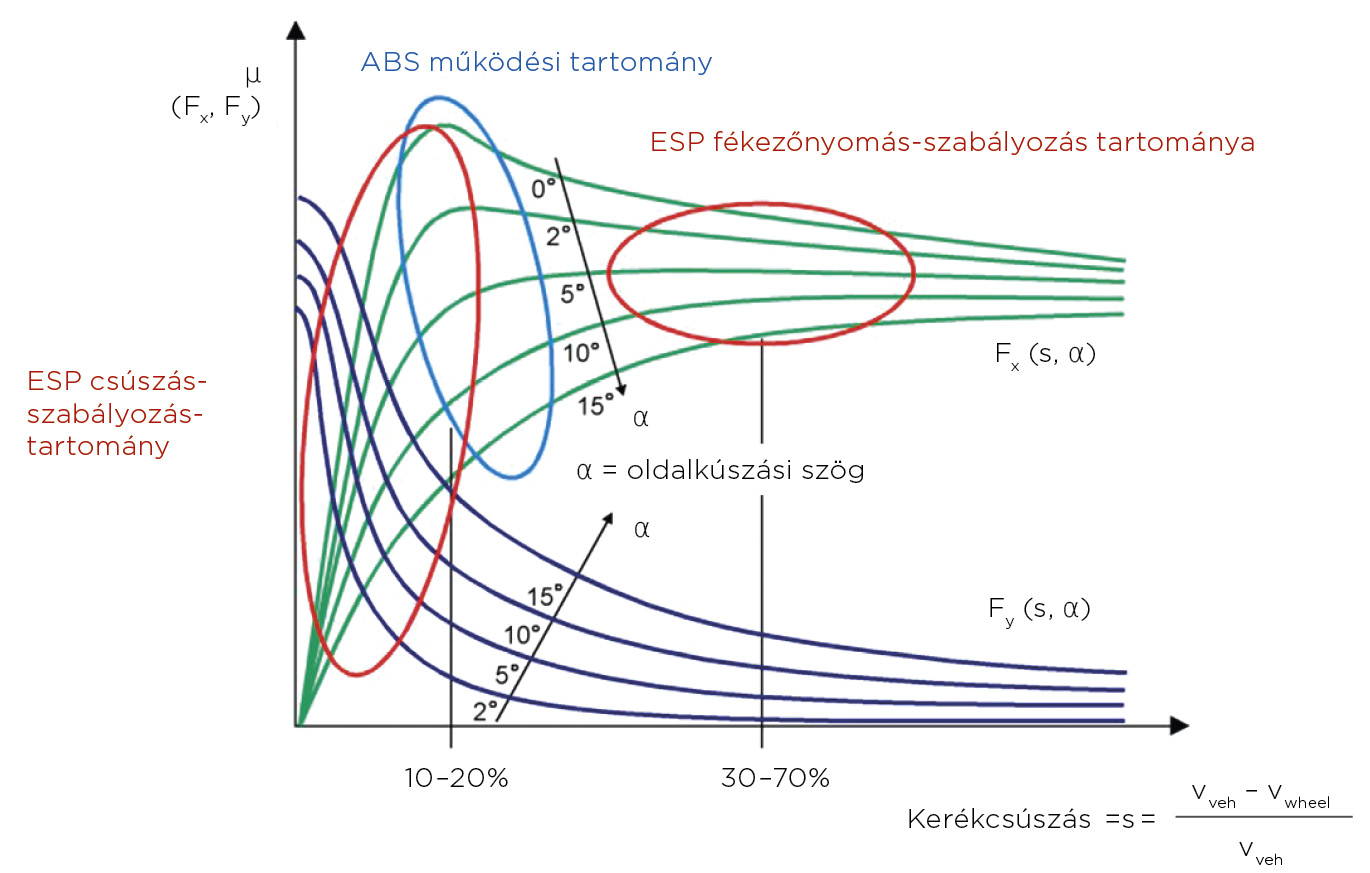
➍ Az ESP-beavatkozás tartománya a kerék-erőátviteli diagramban
Ez egy klasszikus perdületszabályozás (a gépkocsi függőleges tömegközépponti tengelye körüli elfordulás sebességének a szabályozása), mely egy megadott matematikai járműmodell alapján működik. Ezt egészíti ki a kúszási szög változásának kompenzálása. Ez a rendszer már nemcsak fékezéskor vagy gyorsításkor avatkozik be, hanem, amikor a gépkocsi stabilitása azt megkívánja. Nem szabad azonban megfeledkezni arról, hogy ez a menetdinamikai szabályozó rendszer is csak a fizikai törvények határain belül képes stabilizálni a gépkocsit.
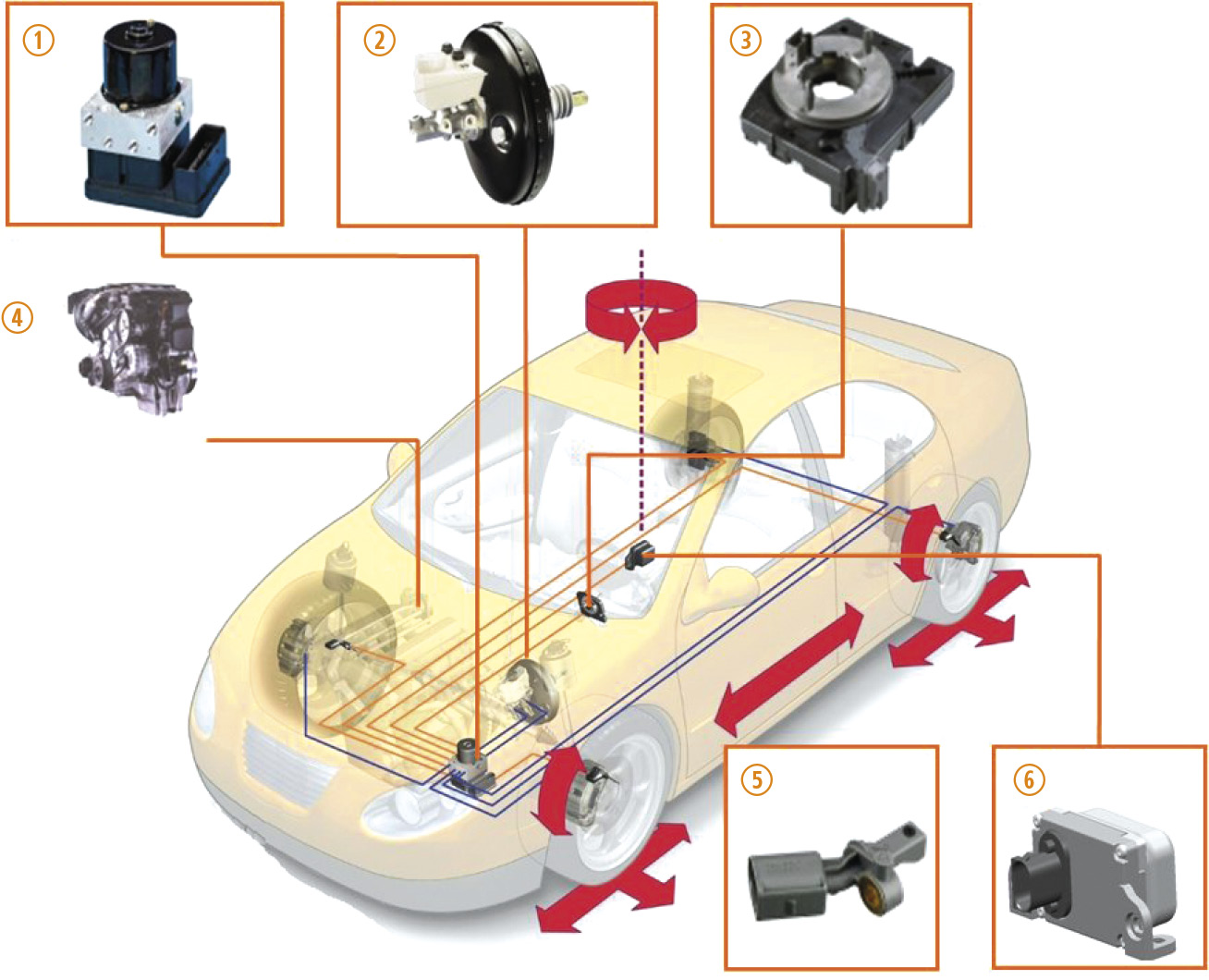
➎ Az ESP-rendszer részegységei
① hidraulikaegység az elektronikával,
② aktív vákuumos rásegítő a főfékhengerrel,
③ kormánykerék-elfordítás érzékelő,
④ motor pillangószelep állító,
⑤ ABS kerékfordulatszám-érzékelő,
⑥ perdülés- és keresztirányú gyorsulásérzékelő
Jobbá teszi a gépkocsi irányíthatóságát például erős terhelésváltás esetén, vagy amikor nagy nyomatékkal használják a motorféket. Ilyen esetekben is javítja a menetstabilitást. Támogatja a dinamikus kormányzási beavatkozást, megakadályozza a gépkocsi „túlfordulását”, de csak a fizikai törvények határain belül.
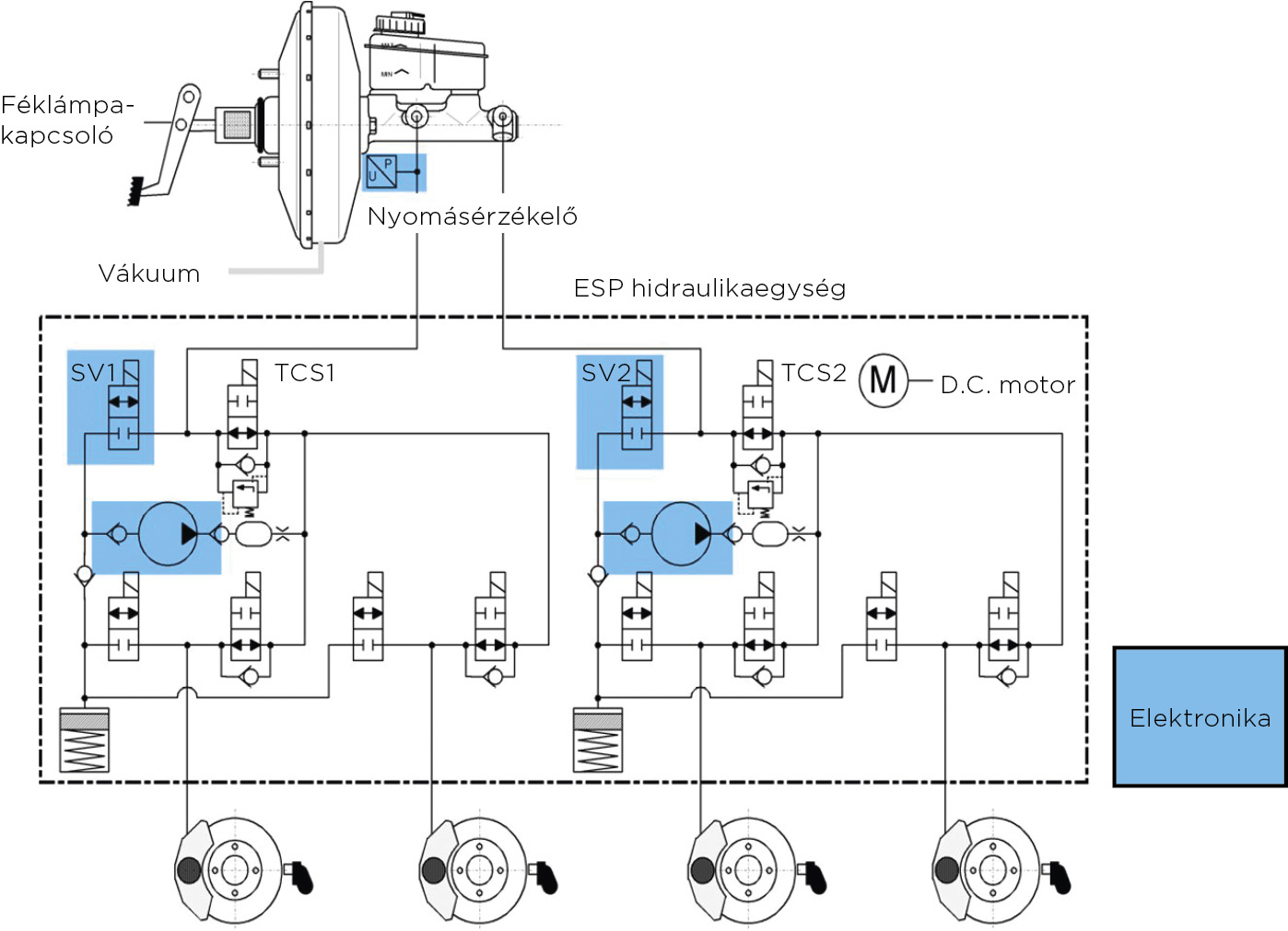
➏ ESP hidraulikarendszer felépítése
TRAILER STABILITY PROGRAM
Az újabb fejlesztéseknek köszönhetően kiegészült az ESP működése az úgynevezett utánfutó stabilizáló algoritmussal. Ez a vontató a gépkocsira fejti ki hatását, amikor az utánfutó kezdi belengetni a teljes járműszerelvényt. Ezt a szabályozási módot Trailer Stability Program-nak nevezik, és TSP-nek rövidítik. Ennek keretében egy valódi kúszási szög szabályozás valósul meg, és automatikus lassítás is bekövetkezik.
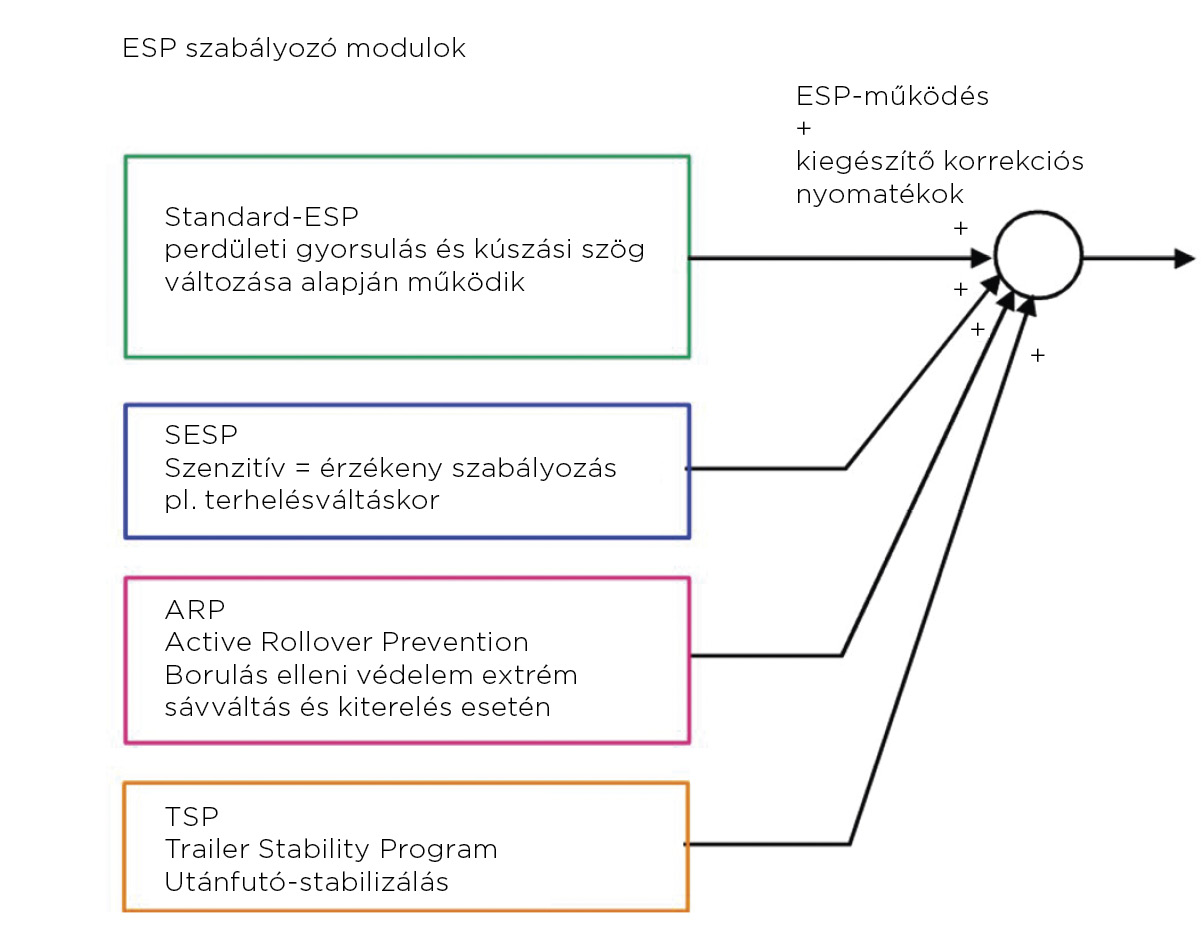
➐ Az ESP szabályozó modulok
Az ESP-rendszer részei:
– Elektro-hidraulikus szabályozó egység, az elektronikával. Ez nagyon hasonlatos az ABS / ASR hidraulikaegységhez.
– Aktív vákuumos fékrásegítő (ez hozza létre a vezetőtől függetlenül a fékezőnyomást az egyes kerekeknél történő szelektív beavatkozásokhoz).
– Kormányzási szöghelyzet érzékelő.
– CAN hálózati kommunikáció a motornyomaték-szabályozáshoz.
– Kerékfordulatszám-érzékelők (4 db).
– Perdülés- és keresztirányú gyorsulásérzékelő.
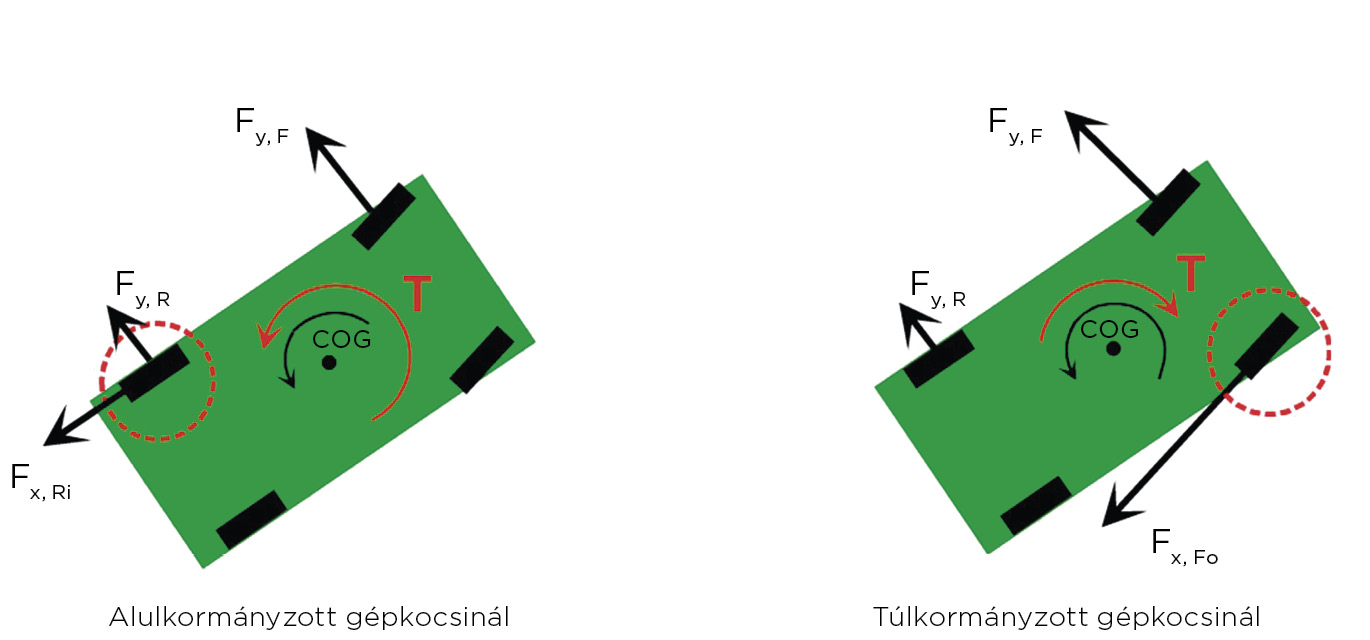
➑ ESP-beavatkozások alul- éstúlkormányzott gépkocsinál
AZ ESP ÖSSZETETT MENETDINAMIKAI SZABÁLYOZÓ RENDSZER
Ez már nemcsak a gépkocsi hosszdinamikáját, hanem a hossz- és keresztirányú dinamikáját is képes befolyásolni. Ezzel jelentősen növeli a gépkocsik aktív biztonságát. Ez az alapján történik, hogy a szoftver által tárolt matematikai modell alapján minden hatodik milliszekundumban összehasonlítja a vezető által kívánatosnak tartott menetpályát, a gépkocsi tényleges menetpályájával.
A vezető szándéka a kormánykerék elfordítási iránya, az elfordítás sebessége és szöghelyzete, és hozzá hasonlóan a gáz-, illetve a fékpedál helyzete és annak változása, valamint a gépkocsi sebessége alapján határozható meg.
A gépkocsi tényleges menetpályájára vonatkozó információk a perdülés, a kereszt-, illetve összkerékhajtásúaknál a hosszirányú gyorsulásérzékelők, továbbá a kerékfordulatszám-érzékelők jelei alapján szerezhetők. Ebből is kitűnik, hogy ezeknek a speciális érzékelőknek a kifogástalan működése nagyon fontos az ESP-szabályozás szempontjából.
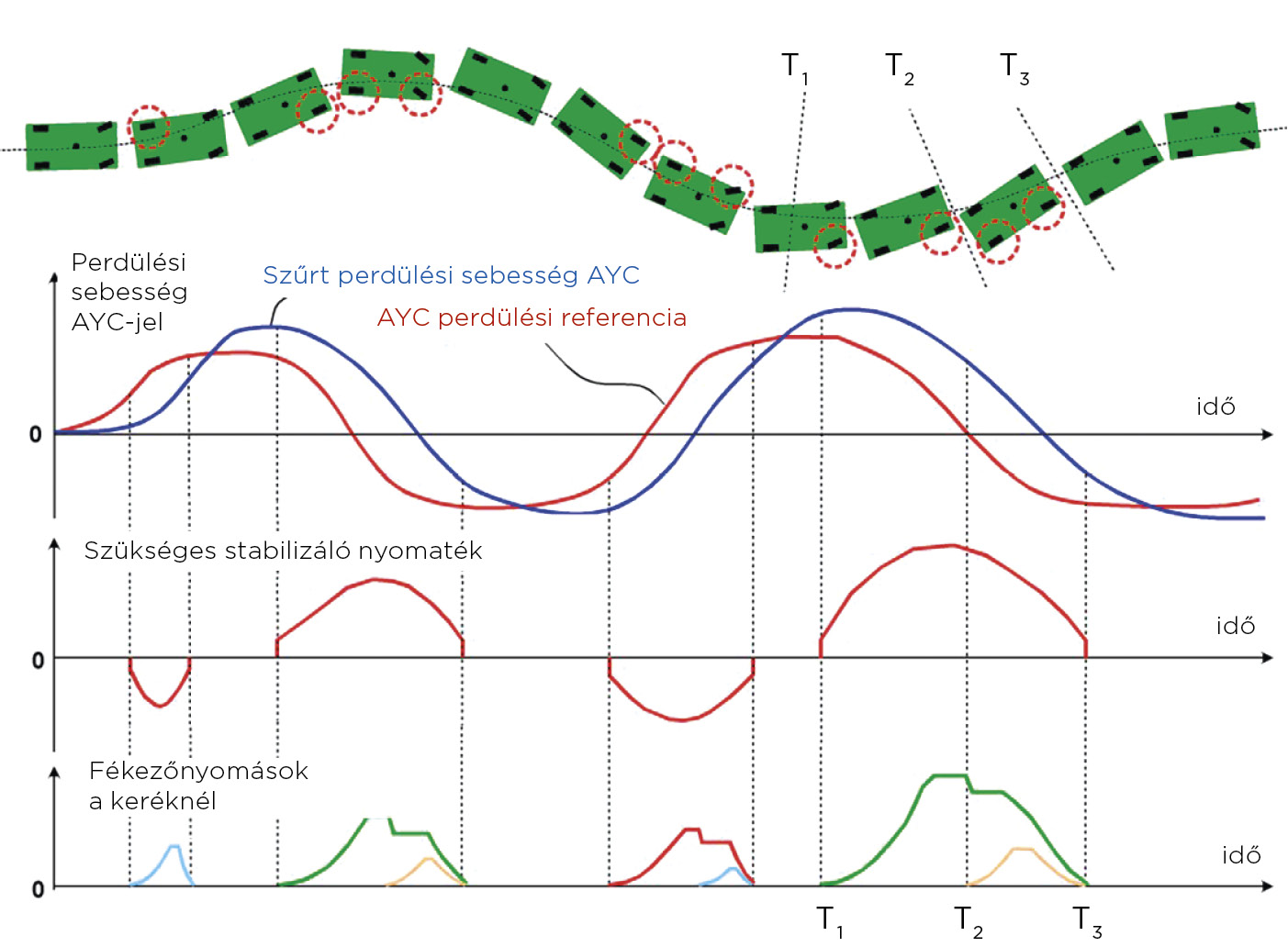
➒ Az ESP működése szlalom menetben
Az ESP-szabályozásnak az alábbi részprogramjai használatosak:
– blokkolásgátló ABS (és annak nagyobb kerékcsúszást engedélyező „terep fokozata”,
– kipörgésgátló ASR (és annak nagyobb kerékcsúszást engedélyező „terep fokozata”,
– perdülési nyomaték szabályozás (GMR),
– elektronikus fékerőfelosztás (EBV),
– fékasszisztens-működés (BA),
– utánfutó-stabilizálás (TSP).
AZ ESP-BEAVATKOZÁS MÓDJA ÉS HATÁSA
Amikor a gépkocsi alulkormányzott módon viselkedik: az elektronika impulzusszerű fékezést hajt végre a kanyar belső ívén futó hátsó keréknél. Túlkormányzott viselkedés esetén az elektronika a szükséges mértékben fékezi a kanyar külső ívén futó első kereket. Dinamikus kormányzási manővereknél az ESP megkönnyíti az ellenkormányzást.
Ha szükséges, az ESP csökkenti a motor hajtó nyomatékát is. Kanyarban történő gyorsításkor megakadályozza az extrém alulkormányzott viselkedést. Csökkenti a stabilitásvesztés veszélyét a hirtelen bekövetkező terhelésváltáskor. Az ESP megfelelő periódusokban változó fékező beavatkozásokkal támogatja a szlalom menetet.
A Standard-ESP a gépkocsi perdületi gyorsulásának és kúszási szög változásának alapján működik. Ezt további algoritmusok finomítják, melyekkel különböző célokat valósítanak meg. Ilyenek például a következők:
SESP, ennek a rövidítésnek az első „S” betűje a szenzitív szót helyettesíti, amely magyarul „érzékeny”-t jelent. Ennek a szabályozásnak az előnyei terhelésváltáskor mutatkoznak meg.
ARP, ez az Active Rollover Prevention rövidítése, mely a borulás elleni védelmet jelenti. Nagyon dinamikus sávváltásnál, illetve kitérés esetén hatékonyan növeli az aktív biztonságot.
TSP, melyről az előzőekben már írtunk, a Trailer Stability Program, vagyis az utánfutó-stabilizálás.
ABS- ÉS ESP-RENDSZEREK GYÁRTÁSA
A Continental Teves MK 20 volt az első ESP-szabályozásra alkalmas hidraulikaegység változat. Ennél külön egységet alkotott az opto-kapus működési elvű kormánykerék-elfordítás érzékelő, a speciális kettős hangvillával működő perdülésérzékelő, melynek házába szerelték a keresztirányú gyorsulásérzékelőt, illetve összkerékhajtású gépkocsiknál a hosszirányú lassulásérzékelőt. Ez utóbbiakból fejlesztették ki az intelligens „sensor-cluster”-t, mely már szűrte és kiértékelte az érzékelők jeleit. A CAN-hálózaton keresztül küldte azokat az ESP-elektronikának. Ennek az MK 20 rendszernek a gyártása 2000-ig tartott. Ezt a rendszert követte az MK 60 típusváltozat, melyet 2000–2002 között gyártottak. Ezt követte az MK 70 változat. Bizonyos működések csak az MK25E / MK60E típusoknál állnak rendelkezésre. Az MK 60 típusnál például két kiegészítő nyomásérzékelőt alkalmaztak.
Schiel Lothar előadása nyomán lejegyezte: Kőfalusi Pál


