
A hatásfok javítása a motorvezérlésben
Kedves olvasóink!
Aktuális témáink boncolgatásakor mi is kutakodunk. Aki keres, az talál – mi is találtunk! Amit találtunk egy rendkívül aktuális és fontos téma: a motorvezérlés hatásfokának javítása. Az erről szóló kifogástalan anyagot a Magyar Elektronika weboldalon leltük fel még 2016-ból, viszont időtállóságát mi sem csorbítja. A Magyar Elektronika Szakfolyóirat (ADL Kiadó Kft.) szerkesztőségének szíves hozzájárulásával a cikket változtatás nélkül az alábbiakban közöljük.
Aktuális témáink boncolgatásakor mi is kutakodunk. Aki keres, az talál – mi is találtunk! Amit találtunk egy rendkívül aktuális és fontos téma: a motorvezérlés hatásfokának javítása. Az erről szóló kifogástalan anyagot a Magyar Elektronika weboldalon leltük fel még 2016-ból, viszont időtállóságát mi sem csorbítja. A Magyar Elektronika Szakfolyóirat (ADL Kiadó Kft.) szerkesztőségének szíves hozzájárulásával a cikket változtatás nélkül az alábbiakban közöljük.
Az energiafelhasználásban az ipari hajtások, motorvezérlések jelentős hányadot képviselnek. Ezért az e területen elért hatásfokjavítás mérhetően csökkenti a globális energiafogyasztást és környezetszennyezést. A cél eléréséhez a cikkben szereplő megfontolások is hozzájárulhatnak.
A hatásfok az a „szent grál”, amely minden villamosmotor-alapú alkalmazás tervezője érdeklődésének középpontjában áll. A legkülönbözőbb jelenkori villamosmotor-alkalmazásokat megvizsgálva felismerhető bennük a hatásfok folytonos növelésére és az ár csökkentésére irányuló trend. Például az autók motorterében a szivattyúk és ventilátorok hajtásának régebben a legáltalánosabban használt módszere a szíjhajtás volt. Azonban – annak ellenére, hogy a motor forgásának ezekre a részegységekre való közvetlen átvitele kézenfekvő módszernek tűnik – ez a megoldás nem túl hatékony. Ha viszont elektromotorral hajtjuk ezeket, attól nemcsak az alkalmazás flexibilitása javul, hanem – jelentős mértékben – a hatásfok is. Egy másik példa a mosógép, amelyben régebben tipikusan váltakozó áramú indukciós motorokat alkalmaztak. A háztartási gépek hatásfokának növelésének fokozódó igénye, a mosási ciklus jobb vezérelhetősége és a víztakarékosabb működés követelménye miatt napjainkban mégis az állandómágneses szinkronmotor használata válik egyre jellemzőbbé.
Természetesen ez a trend erősen összefügg a hajtáshoz szükséges inverter és vezérlés céljára használható félvezető-alkatrészek fejlődésével is. A múltban az elektronikus motorvezérléshez szükséges kapcsolóelemek ára a végtermék alkatrészköltségének jelentős összetevőjét képviselte, amely számos alkalmazásban korlátozta a szinkronmotorok használatát. Ma azonban csökken a félvezetők ára, ezért a szinkronmotorok használata is egyre inkább válik kivételből szabállyá számos alkalmazásban.
Természetesen ez a trend erősen összefügg a hajtáshoz szükséges inverter és vezérlés céljára használható félvezető-alkatrészek fejlődésével is. A múltban az elektronikus motorvezérléshez szükséges kapcsolóelemek ára a végtermék alkatrészköltségének jelentős összetevőjét képviselte, amely számos alkalmazásban korlátozta a szinkronmotorok használatát. Ma azonban csökken a félvezetők ára, ezért a szinkronmotorok használata is egyre inkább válik kivételből szabállyá számos alkalmazásban.
1. ábra Elektromos motorok a jármű jobb üzemanyag-hasznosításáért
A motorválasztás lehetőségei
Azok a motortípusok, amelyeket számításba vehetünk, ha jó hatásfokot és dinamikus vezérelhetőséget igénylő alkalmazást tervezünk, a következők[1]:
- Váltakozó áramú indukciós motor (AC Induction Motor – ACIM)
- Kefe nélküli egyenáramú motor (Brushless DC – BLDC – motor)
- Síkelrendezésű, állandómágneses szinkronmotor (Permanent Magnet Synchronous Motor – PMSM vagy Surface Permanent Motor – SPM)
- Állandómágneses forgórészű szinkronmotor
- (Internal PMSM – IPMSM vagy IPM)
- Reluktanciamotor kapcsolóüzemű vezérléssel
- (Switched Reluctance Motor – SRM)
- Szinkron reluktanciamotor (SyncRM)
A különféle motortípusokat hatásfok szerint a következőképpen rangsorolhatjuk (a sort a legnagyobb hatásfokúval kezdve): IPMSM, PMSM, BLDC, SynchEM, SRM és ACIM. Ez a sorrend azonos az egységnyi motortömegre vonatkoztatott teljesítmény és nyomaték rangsorával.
Az ACIM az ipari alkalmazások „igáslova”, ezért ez a legelterjedtebb a nagy (>1 kW) teljesítményű alkalmazásokban. Azonban, a hatásfok növelésére irányuló erőteljes igény miatt sok ACIM-alkalmazást korszerűsítenek elektronikus hajtásvezérléssel. A dinamikus vezérelhetőséget igénylő alkalmazásokban a PMSM használatának van értelme. Néhány további alkalmazásban, ahol az ár kritikus fontosságú, valamint a motor tömegegységére vonatkoztatott nyomatéka és a robusztus konstrukció is lényeges, az SRM alkalmazása látszik kedvezőnek. Egy másik ipari alkalmazástípusban, a nagy (>10 kW) teljesítményű kompresszorok hajtásánál korábban szinte kizárólag ACIM-hajtást alkalmaztak. E területen most kezdik bevezetni a SynchRM használatát. Ez utóbbiak szerkezete nagyon hasonló az ACIM-ekéhez: az állórész felépítése azonos, csak a forgórész különbözik. Ez a különbség azonban azzal a kellemes következménnyel jár, hogy azonos méretek mellett a SynchRM nyomatéka és hatásfoka nagyobb, illetve kisebb méretű SynchRM is elegendő az azonos nyomaték előállításához.
Léteznek olyan alkalmazási területek is, amelyekben régebben a villamos motorhajtás egyáltalán nem volt jellemző: ilyen például az autók motortere. Itt az elektromos motorok szerepe a mechanikus szíjhajtások kiváltása, amely növeli a hatásfokot, mivel a villamos motor a terhelés igényétől függően kapcsolható be és ki, míg a szíjhajtás „ha kell, ha nem”, együtt forog a jármű belső égésű motorjával. Manapság pedig minden számít, aminek a hatásfokhoz, a fajlagos üzemanyag-felhasználáshoz és a károsanyag-emisszióhoz köze van. Ebben az alkalmazási körben az a trend, hogy a szíjhajtás szerepét BLDC- vagy PMSM-motor veszi át.
Az autókban előforduló másik új alkalmazási terület a „drive by wire”, azaz a vezetőülés kezelőszervei nem mechanikus áttételekkel, hanem elektromos energiával működő kapcsolatokkal avatkoznak be a jármű funkcióiba. Ennek egyik példája az SRM-ek használata, a fékhidraulikát működtető szivattyú elektromos meghajtása. Az SRM jó dinamikai tulajdonságai teszik lehetővé, hogy szükség esetén gyorsan növekedhessen a fékfolyadék nyomása, amely kulcsfontosságú feltétel a gyors reagálású fék megvalósításához.
Az elektronikusan vezérelt motorok újabb, az eddigiektől teljesen eltérő alkalmazási területe az akkumulátorról működő elektromos kéziszerszámok és háztartási készülékek köre.
Az akkumulátor-technológia terén végbement fejlődés – például a lítium-ion akkumulátorok megjelenése – lehetővé tette porszívók és elektromos hajtású kéziszerszámok gyártását a BLDC-motorok jó hatásfokának kihasználásával. Régebben ezekben a készülékekben főként kefés DC-motorokat használtak, de ez jelentősen korlátozta a motor fordulatszámát és maximális nyomatékát. A súly- vagy térfogategységre vonatkoztatott nagyobb teljesítmény és nyomaték, a hosszabb élettartam és kisebb tömeg lehetővé tette, hogy a kábel nélkül használható eszközök teljesítőképessége megközelítse a vezetékes energiaellátással működőkét.
A háztartási készülékekben, például mosógépekben, hűtőszekrényekben, mosogatógépekben, légkondicionálókban éppúgy, mint az ipari alkalmazásokban a leggyakrabban használt „igásló” az ACIM. Nagyjából az ezredforduló óta azonban a kefe nélküli konstrukciók – főként a BLDC- és PMSM-motorok – egyre nagyobb jelentőségre tesznek szert. Ennek a fő hajtóerejét a kormányzatoknak a hatásfok növelését előíró rendelkezései jelentik. Az ACIM-ről a jobb hatásfokú motortechnológiákra való áttérés problémáját a fogyasztási cikkek körében mindig az ár jelenti – a motoré és a meghajtó áramköré egyaránt. Szerencsére mindkettőnek az árszintje jelentősen csökken, amely lehetővé teszi, hogy az új konstrukciókban már a nagyobb hatásfokú motortechnológiákat használják a gyártók.
Az ACIM az ipari alkalmazások „igáslova”, ezért ez a legelterjedtebb a nagy (>1 kW) teljesítményű alkalmazásokban. Azonban, a hatásfok növelésére irányuló erőteljes igény miatt sok ACIM-alkalmazást korszerűsítenek elektronikus hajtásvezérléssel. A dinamikus vezérelhetőséget igénylő alkalmazásokban a PMSM használatának van értelme. Néhány további alkalmazásban, ahol az ár kritikus fontosságú, valamint a motor tömegegységére vonatkoztatott nyomatéka és a robusztus konstrukció is lényeges, az SRM alkalmazása látszik kedvezőnek. Egy másik ipari alkalmazástípusban, a nagy (>10 kW) teljesítményű kompresszorok hajtásánál korábban szinte kizárólag ACIM-hajtást alkalmaztak. E területen most kezdik bevezetni a SynchRM használatát. Ez utóbbiak szerkezete nagyon hasonló az ACIM-ekéhez: az állórész felépítése azonos, csak a forgórész különbözik. Ez a különbség azonban azzal a kellemes következménnyel jár, hogy azonos méretek mellett a SynchRM nyomatéka és hatásfoka nagyobb, illetve kisebb méretű SynchRM is elegendő az azonos nyomaték előállításához.
Léteznek olyan alkalmazási területek is, amelyekben régebben a villamos motorhajtás egyáltalán nem volt jellemző: ilyen például az autók motortere. Itt az elektromos motorok szerepe a mechanikus szíjhajtások kiváltása, amely növeli a hatásfokot, mivel a villamos motor a terhelés igényétől függően kapcsolható be és ki, míg a szíjhajtás „ha kell, ha nem”, együtt forog a jármű belső égésű motorjával. Manapság pedig minden számít, aminek a hatásfokhoz, a fajlagos üzemanyag-felhasználáshoz és a károsanyag-emisszióhoz köze van. Ebben az alkalmazási körben az a trend, hogy a szíjhajtás szerepét BLDC- vagy PMSM-motor veszi át.
Az autókban előforduló másik új alkalmazási terület a „drive by wire”, azaz a vezetőülés kezelőszervei nem mechanikus áttételekkel, hanem elektromos energiával működő kapcsolatokkal avatkoznak be a jármű funkcióiba. Ennek egyik példája az SRM-ek használata, a fékhidraulikát működtető szivattyú elektromos meghajtása. Az SRM jó dinamikai tulajdonságai teszik lehetővé, hogy szükség esetén gyorsan növekedhessen a fékfolyadék nyomása, amely kulcsfontosságú feltétel a gyors reagálású fék megvalósításához.
Az elektronikusan vezérelt motorok újabb, az eddigiektől teljesen eltérő alkalmazási területe az akkumulátorról működő elektromos kéziszerszámok és háztartási készülékek köre.
Az akkumulátor-technológia terén végbement fejlődés – például a lítium-ion akkumulátorok megjelenése – lehetővé tette porszívók és elektromos hajtású kéziszerszámok gyártását a BLDC-motorok jó hatásfokának kihasználásával. Régebben ezekben a készülékekben főként kefés DC-motorokat használtak, de ez jelentősen korlátozta a motor fordulatszámát és maximális nyomatékát. A súly- vagy térfogategységre vonatkoztatott nagyobb teljesítmény és nyomaték, a hosszabb élettartam és kisebb tömeg lehetővé tette, hogy a kábel nélkül használható eszközök teljesítőképessége megközelítse a vezetékes energiaellátással működőkét.
A háztartási készülékekben, például mosógépekben, hűtőszekrényekben, mosogatógépekben, légkondicionálókban éppúgy, mint az ipari alkalmazásokban a leggyakrabban használt „igásló” az ACIM. Nagyjából az ezredforduló óta azonban a kefe nélküli konstrukciók – főként a BLDC- és PMSM-motorok – egyre nagyobb jelentőségre tesznek szert. Ennek a fő hajtóerejét a kormányzatoknak a hatásfok növelését előíró rendelkezései jelentik. Az ACIM-ről a jobb hatásfokú motortechnológiákra való áttérés problémáját a fogyasztási cikkek körében mindig az ár jelenti – a motoré és a meghajtó áramköré egyaránt. Szerencsére mindkettőnek az árszintje jelentősen csökken, amely lehetővé teszi, hogy az új konstrukciókban már a nagyobb hatásfokú motortechnológiákat használják a gyártók.
Hajtástechnológiák
Amint azt korábban is említettük, a meghajtó áramkör az elektronikus kommutációt alkalmazó motorok fontos része, ezért lényegében kihagyhatatlan, nélküle semmi sem történik. Majdnem minden motortípusnál, amelyeket eddig említettünk, a vezérlőáramkör nagyon hasonló felépítésű (2a. ábra). A kivétel az SRM (2b. ábra). A legnagyobb különbség ezek közt a motorok közt a vezérlésben van, azaz abban a módszerben, hogyan állítjuk elő a vezérlőjeleket a 2. ábrán látható teljesítményfokozatokhoz.
Ezt aszerint kell megvalósítani, milyen az adott motor konstrukciója, amely a sajátos elektromágneses viselkedését okozza. Ezt a megfelelő áram- vagy feszültségjelalak létrehozásakor figyelembe kell venni az optimális, jó hatásfokú működés érdekében.
Ezt aszerint kell megvalósítani, milyen az adott motor konstrukciója, amely a sajátos elektromágneses viselkedését okozza. Ezt a megfelelő áram- vagy feszültségjelalak létrehozásakor figyelembe kell venni az optimális, jó hatásfokú működés érdekében.
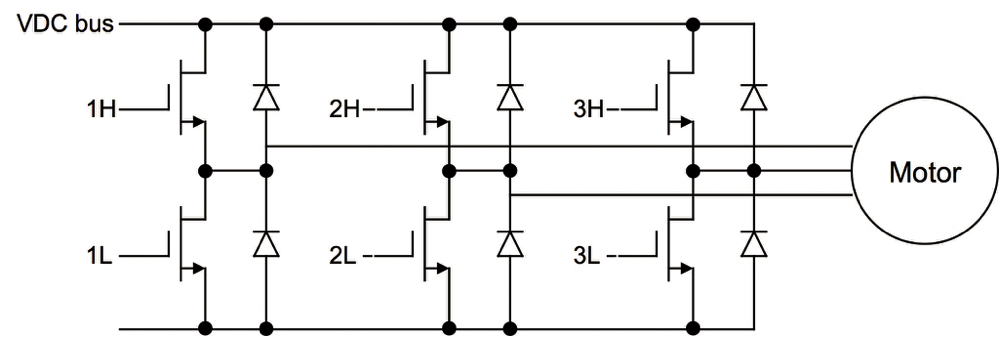
2a. ábra Szinkronmotor meghajtó áramköre
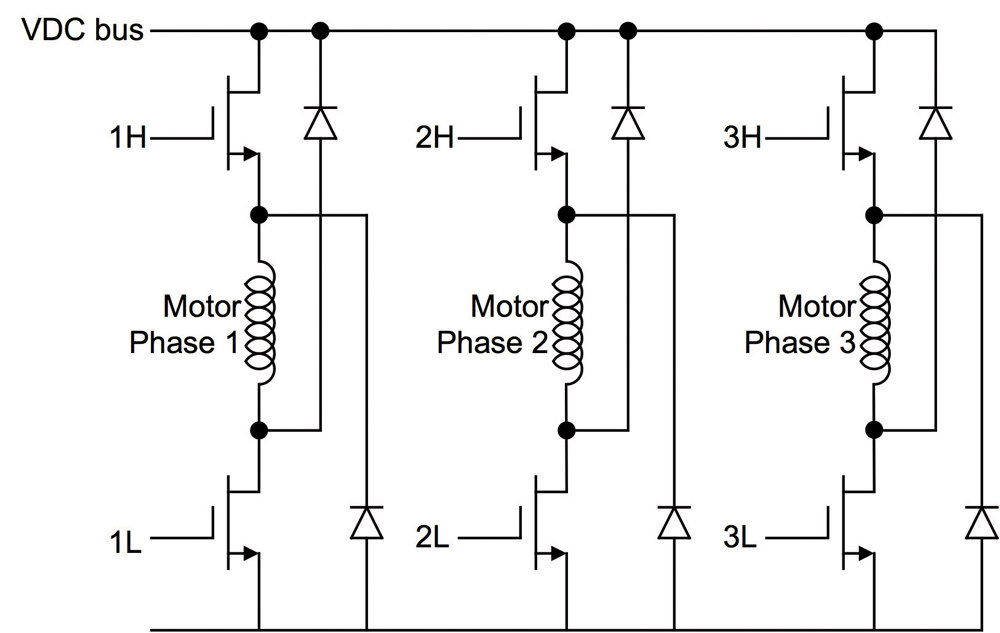
2b. ábra Szinkron reluktanciamotor (SRM) meghajtó áramköre
Az elektronikusan kommutált motorokra történő áttérés korai szakaszában a megcélzott alkalmazási területek nagy része nagyon árérzékeny volt. Ennek eredményeképpen gyakran választották a BDLC-motorokat, mivel a vezérlésükhöz szükséges trapézjel alakú kommutáló jelet egy egyszerű, 8 bites mikrovezérlővel is elő lehetett állítani. Az ár bizonyos esetekben még így is túl magasnak bizonyult. A következő 15 év viharos fejlődési üteme következtében a nagyteljesítményű digitális jelfeldolgozók és mikrovezérlők ára eléggé lecsökkent ahhoz, hogy az árérzékeny alkalmazásokban is használhatók legyenek az olyan fejlett vezérlőalgoritmusok futtatására, mint például a Field Oriented Control[2] (FOC). Ennek előnyeit például a háztartási fűtőberendezések keringetőszivattyúinak vagy az autók hűtőventilátorának hajtásánál lehet kihasználni (3. ábra). De mit is tudnak egyáltalán ezek a különleges vezérlő-algoritmusok? Miért nem elég jó a trapézjellel vezérelt BLDC-motor?
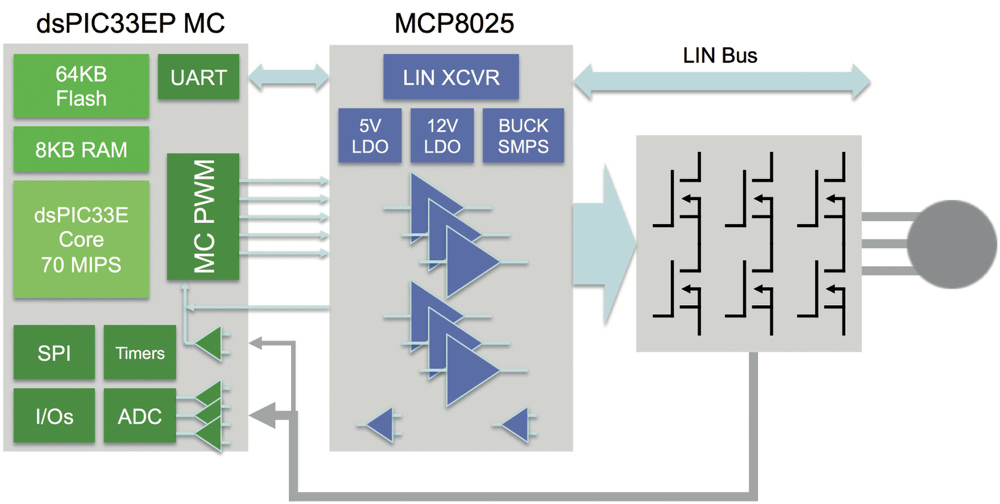
3. ábra Autó hűtőventilátor-vezérlésének megvalósítása
Hatásfok
Sok szó esik a motorok és a meghajtók hatékonyságáról, de minden gondolatmenet végkövetkeztetése az, hogy leginkább a teljes rendszer hatásfoka számít. Például már említettük a gépkocsimotoroknál használt szíjhajtásokat. Ezek hatásfoka önmagukban kiváló ugyan (meghaladja a 90%-ot), de nem lehet leállítani, ha a meghajtásra pillanatnyilag nincs szükség. Ehelyett a szíjhajtás haszontalanul működik, hajtja a feleslegesen forgó terhelést, és ezzel jelentős veszteséget okoz. Hasonlóképpen, ha elektromechanikus hajtásra térünk át, keletkeznek bizonyos járulékos veszteségek, például a vibráció, amelyet az egyszerű motorvezérlés nyomatékingadozása okoz. Ez a BLDC- és az SRM-motorok működésének mellékhatása. Az alkalmazás igényeit követve a hatásfokot tovább növelhetjük tehát, ha a motor sima futásáról is gondoskodunk. Ez az a többlet, amit a FOC- vagy egyéb, hasonló vektorvezérlő algoritmus alkalmazásától várhatunk.
Egy másik fontos tényező a terhelés, amit a vezérelt motor meghajt. Minden motornak van egy jellegzetes terheléshatékonysági diagramja, amely a 4. ábrához hasonlít (ez az ábra a hajtás hatásfokát is magában foglalja). Amint az látható, ennek a diagramnak van egy maximumpontja a motor névleges nyomatékánál, de a legtöbb hajtásrendszerre nem az állandó nyomatékigényű terhelés a jellemző. Némely esetben a nyomatékigény a motor teljes működési tartományára is kiterjedhet. Ennek egy példája egy légkondicionáló berendezés kompresszora. Itt a terhelés egyrészt attól függően is változik, milyen mértékű fűtő- vagy hűtőteljesítményt kell a rendszernek szolgáltatnia; másrészt a terhelőnyomaték egyetlen kompresszorcikluson belül is ingadozik. Mivel a klímagépek kompresszorai gyakorlatilag állandóan működnek, a legjobb hatásfokuk miatt az IPM-motorok használata vált általánossá. Ám ha egy IPM-motor hatásfokdiagramját egy azonos teljesítményű SynchRM-ével hasonlítjuk össze, azt látjuk, hogy míg az IPM-motor maximális hatásfoka a névleges terhelőnyomatéknál jelentkezik, addig a SychRM-motor diagramja laposabb. Másképpen szólva: kis terhelésnél a SynchRM hatásfoka a nagyobb, ami azt eredményezi, hogy a teljes rendszer teljes üzemi tartományra vonatkoztatott hatásfoka a két motortípusnál igen hasonló.
Egy másik fontos tényező a terhelés, amit a vezérelt motor meghajt. Minden motornak van egy jellegzetes terheléshatékonysági diagramja, amely a 4. ábrához hasonlít (ez az ábra a hajtás hatásfokát is magában foglalja). Amint az látható, ennek a diagramnak van egy maximumpontja a motor névleges nyomatékánál, de a legtöbb hajtásrendszerre nem az állandó nyomatékigényű terhelés a jellemző. Némely esetben a nyomatékigény a motor teljes működési tartományára is kiterjedhet. Ennek egy példája egy légkondicionáló berendezés kompresszora. Itt a terhelés egyrészt attól függően is változik, milyen mértékű fűtő- vagy hűtőteljesítményt kell a rendszernek szolgáltatnia; másrészt a terhelőnyomaték egyetlen kompresszorcikluson belül is ingadozik. Mivel a klímagépek kompresszorai gyakorlatilag állandóan működnek, a legjobb hatásfokuk miatt az IPM-motorok használata vált általánossá. Ám ha egy IPM-motor hatásfokdiagramját egy azonos teljesítményű SynchRM-ével hasonlítjuk össze, azt látjuk, hogy míg az IPM-motor maximális hatásfoka a névleges terhelőnyomatéknál jelentkezik, addig a SychRM-motor diagramja laposabb. Másképpen szólva: kis terhelésnél a SynchRM hatásfoka a nagyobb, ami azt eredményezi, hogy a teljes rendszer teljes üzemi tartományra vonatkoztatott hatásfoka a két motortípusnál igen hasonló.
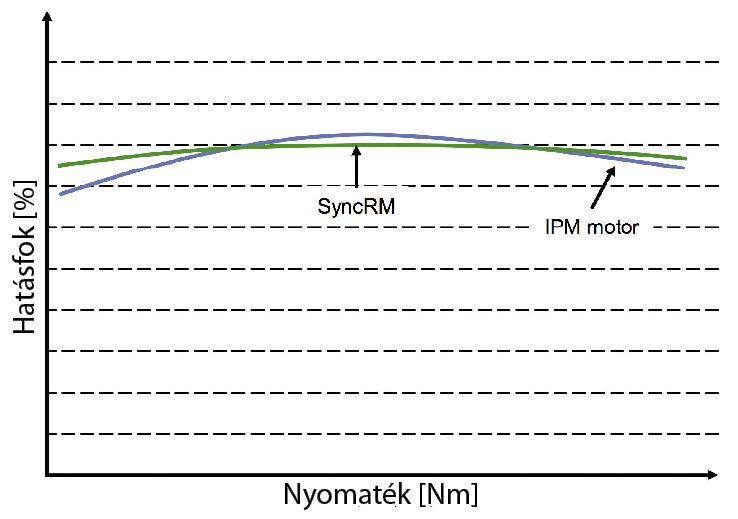
4. ábra A motor és a hajtás együttes hatásfok-diagramja a terhelőnyomaték függvényében
Összefoglalás
Az a trend, amely a nagyobb hatásfokú elektromotorok elterjedésének felgyorsulását mutatta, az ezredforduló körül kezdődött. A folyamat elindítója a kefe nélküli, állandó mágnesű motorok és a javuló minőségű vezérlő félvezetők árának csökkenése és teljesítőképességük javulása volt. Ez a trend a fogyasztási cikkek területén is éreztette a hatását, főként a BLDC-motorokat használó termékekben. Azóta ez a trend kiterjedt a váltakozó áramú aszinkronmotorok elektronikus kommutációjára, újraélesztette a kapcsolóüzemű vezérléssel működő reluktanciamotorokat, és még az állandó mágnesek használatát is kiküszöbölte a szinkron reluktanciamotorokkal.
A legfontosabb tanulságok egyike, hogy egy rendszer hatásfokának vizsgálatánál annak minden részét egyszerre kell figyelembe vennünk, mivel a hatásfokot végső soron pénzügyi értelemben kell maximalizálni. Következésképpen az alkalmazás sajátosságai függvényében kell választanunk a rendelkezésre álló motortechnológiák és vezérlési algoritmusok közül. Nincs olyan motortechnológia, amely minden körülmények között, minden tulajdonságában a legjobb. Ezért tehát az elektromotoros hajtások tervezőinek meg kell fontolniuk a rendelkezésre álló technológiák alkalmazása mellett és ellen szóló érveket annak érdekében, hogy az igényeiknek a legjobban megfelelő megoldást megtalálhassák.
A legfontosabb tanulságok egyike, hogy egy rendszer hatásfokának vizsgálatánál annak minden részét egyszerre kell figyelembe vennünk, mivel a hatásfokot végső soron pénzügyi értelemben kell maximalizálni. Következésképpen az alkalmazás sajátosságai függvényében kell választanunk a rendelkezésre álló motortechnológiák és vezérlési algoritmusok közül. Nincs olyan motortechnológia, amely minden körülmények között, minden tulajdonságában a legjobb. Ezért tehát az elektromotoros hajtások tervezőinek meg kell fontolniuk a rendelkezésre álló technológiák alkalmazása mellett és ellen szóló érveket annak érdekében, hogy az igényeiknek a legjobban megfelelő megoldást megtalálhassák.
Erlendur Kristjansson, termékmenedzser ‑ Microchip Technology, 16 bites MCU-részleg
www.microchip.com
www.microchip.com
[1] Az itt következő felsorolásban – a más forrásokkal való könnyebb egybevetés érdekében – dőlt félkövér betűtípussal emeltük ki az egyes motortípusok nevének az angol szaknyelvben általánosan alkalmazott rövidítéseit, amelyeket a szöveg ezt követő részében további magyarázat nélkül alkalmazunk. – A szerk. megj.
[2] A forgó mágneses tér vektorának derékszögű komponensekre bontásán alapuló, jelentős valós idejű matematikai művelet-végrehajtást igénylő vezérlés.
[2] A forgó mágneses tér vektorának derékszögű komponensekre bontásán alapuló, jelentős valós idejű matematikai művelet-végrehajtást igénylő vezérlés.
Forrás: Magyar Elektronika weboldal: magyar-elektronika.hu


