Automatikus vezetés
A gépjárművek növekvő száma miatt egyre nagyobbak a torlódások, amelyek már nemcsak városi forgalmat, hanem az autópályákat és autóutakat is terhelik. Ezt a problémát nem lehet már megoldani autópályák szélesítésével, új autópályák, autóutak építésével. Egyetlen mód van a változtatásra: a közút és a forgalom menedzselése.
Az egyik megközelítés az lenne, hogy olyan automatizált országutakat fejlesszenek ki, amelyben a sávok és a járművek speciális érzékelőkkel és vezeték nélküli kommunikációs rendszerrel vannak ellátva, és utazás közben számítógépes irányítás alatt állnak. A járműveket ideiglenesen összeköthetnénk a kommunikációs hálózattal, amely lehetővé teszi a folyamatos információcserét, mint pl.: sebesség, gyorsulás, fékezés, akadályok stb. Az utak mentén és a gépjárművekben kis számítógépeket telepítenek, így koordinálni lehet a járműveket, és össze lehet hangolni a forgalom áramlását (sebességingadozások, forgalomingadozások stb.). Ezzel maximalizálni lehet az utak kapacitását és az utasok biztonságát. Hátránya, hogy a rendszer bármilyen meghibásodása kisebb ütközésekhez vezethet, mert a járművek közel azonos sebességgel haladnak. Ezt a megoldást automatizált útvonalnak nevezzük. Egy újabb fogalom, amellyel meg kell barátkoznunk.
Automatikus vezetés
A járművezető, aki úgy dönt, hogy használja az automatizált útvonalat, először át kell hogy lépjen egy érvényesítési sávon, hasonlóan a mai autópálya-belépéshez. A rendszer megállapítja, hogy az autó megfelelően működik az automatizált üzemmódban, megállapítja a rendeltetési helyet, és ellenőrzi a levonási díjat a járművezető hitelszámlájáról. A helytelenül működő járművet manuális sávokba terelik. A vezetőt egy gyűjtőterületre irányítja, és az autót egy kapun keresztül az automatizált sávra kormányozza. Egy automatavezérlő rendszer koordinálja az újonnan belépő és a meglévő forgalmi mozgásokat. Automatikus üzemmódban az első utazás a vezetőnek pihentető egészen a kikapcsolásig. A fordított eljárás levinné a járművet az útról. Ennél a pontnál a vezetőnek át kellene vennie az irányítást, ezután a rendszer megfelelő intézkedéseket tud hozni, ha a vezető alszik, beteg vagy meghalt. A másik alternatíva erre az elkötelezett rendszerre egy kevert forgalmi rendszer, amelyben vannak automatizált és nem automatizált járművek, amelyek megosztanák az úttestet. Ez a megközelítés több kiterjedt módosítást igényel az országúti infrastruktúrára, de a kapacitásnövekedés tekintetében ez nyújtaná a legnagyobb emelkedést. Valójában a megközelítések egy spektrumát felfoghatjuk olyan automatizált rendszerekként, amelyekben mindegyik jármű önrendelkezésének a mértéke változik. A vonal egyik vége teljesen független lenne vagy speciális járművek képessé tennék a járműveket, hogy biztonságosan megálljanak, ha előtte valamilyen járműnek hirtelen kellene fékeznie. Általában azonban a technológia legnagyobb része be lenne szerelve az autóba.
A környezet érzékelése
A leírt megoldás megköveteli, hogy a környezet érzékelése pontosan és folyamatosan megtörténjen. Hogy a sávban tudják kormányozni a járműveket, magnetométereket alkalmaznak, amelyek az útba beépített mágneseket érzékelik. Másik megközelítésként vizuális érzékelőkkel, monitorok telepítésével az útpályaszalagokra vagy intelligens képkezelő rendszerek felszerelésével, amelyekkel érzékelni tudják a felfestett sávokat. Akadályészlelést és ütközéskerülést tudnak kezelni a mm hullámhosszú infravörös radar vagy infravörös lézerrendszerek, vagy talán a haladó video képkezelő rendszerek. De lehet adatfúzió-technikák használata a haladó járműveken, hogy az összes érzékeléstechnológiát minimalizálják, amit mindegyik autóba be kellene építeni. Gyorsulásmérők, amelyeket különböző működtető szerkezetek kapcsolnak össze egy járműben, kezelnék a kormányzást, fékezés közben gázadagoló rendszerekkel tartanák fent a megfelelő sebességet és pozíciót. A vezeték nélküli hírközlő rendszerre eső választás az automatizálástól függne. Természetesen minden extra berendezés a jármű költségeit emelné, ami az egyik vitaforrás az automatizált autópályák körül. Az egyik legfontosabb a fejlődő járművek nyitott rendszerének elfogadása, amelyben információkat, szolgáltatásokat és funkciókat (pl.: a közlekedés nyomon követése és vészhelyzet esetén a támogatás) tudják fejleszteni. Jelenleg a világban kb. 20 különböző technológia létezik és csak az USA-ban 20 vállalat foglalkozik a probléma megoldásával. Sajnos ezek a vállalatok tevékenységüket nem hangolják össze.
A forgalom modellezése
Alapvetően ezekhez az automatizált országutakhoz számítógépes szimulációkat alkalmaztak, az ilyen rendszer a legkevésbé költséges módja annak, hogy növelni tudjuk az autópályák kihasználtságát. Az automatizált autóút a kapacitást megkettőzné, sőt megháromszorozná. Például egy tipikus autópálya mintegy 2000 jármű/ó átbocsátóképességgel bír. Az automatizálással ezt az átbocsátóképességet 6000 jármű/ó-ra tudnánk kiterjeszteni, a be- és kijáratok térközelségétől függően. Az ún. PATH-program eredménye egy kifejlesztett mágneses technológia, amelyeket az útba építenek, és amelyeket magnetométerek segítségével érzékelnek a járművek. Ez egy lehetséges módja annak, hogy figyelemmel kísérjük a jármű mozgását és sebességét. További előny az üzemanyag-fogyasztás és a kipufogógáz kibocsátása. Ha ki lehet simítani a gépjárműáramlást, akkor a járművek állandó sebességgel haladhatnak, ami a futásteljesítményt növeli, és a légszennyezést csökkenti. Továbbá a térköz szakasz lecsökken fél autó hosszra, az autók változatlanul haladnak egymás mellett, az akadályok felére csökkennek. Ez 20%-os visszaesést jelentene az üzemanyag-fogyasztásban.
Egyéb megoldások
A sebességtartó automatikák alkalmazása jelentheti a másik megoldást. Az ACC-s automatikus sebességszabályzók, amelyek képesek egy biztonságos távolságot tartani a járművek között, élenjárnak. Ez az eszköz érzékeli az előtte haladó járművet, figyeli a távolságot és a sebességet, ezáltal eldönti, hogy veszélyhelyzet lehetősége áll fenn, ennek megfelelően figyelmeztetést adhat vagy automatikusan fékez. Ennek a rendszernek is van kockázata. Pl.: mondjuk, valaki túl közel jön hozzánk és az ACC hamisan reagál és lassítja az autót. Aki közel jött hozzánk, az ideges lesz, mert látja, hogy indokolatlanul fékezek. A gép megsérti a másik vezető elvárásait és balesethez is vezethet.
Az esetlegesen bekövetkező balesetnél viszont kérdéses lehet, hogy kié a jogi felelősség. Ilyen jellegű nehézségek lépnek fel az ACC-rendszerekben, legalábbis a kezdetekben, habár nem teremt veszélyt, de a hatékonyságot csökkenti. Az európai közösség részvételével fejlődik a telematika, a közlekedéstechnológia, ez a kutatási program negyedik szakasza. Újabb erőfeszítés a vezetésre a vezeték nélküli rádiós kapcsolat két teherautó között, ahol csak az elsőben van ténylegesen vezető. A teherautók nagyon közel mehetnek egymáshoz és a video képkezelés segítségével tartani tudják a sávokat és a biztonságos követési távolságot. Ez az első lépés abba az irányba, hogy teherautó-csoportokat tudjunk irányítani.
Egy másik az európai közösség által támogatott fejlesztési projekt célja, az autonóm ütközéselkerülők támogatása és egy biztonsági invertációs rendszer, egy adaptív tempomat-ellenőrzési program, amelyben érintettek: Jaguar, Volvo, Renault és a Rover. Ráadásul a városi vezetés ellenőrzés erőfeszítése, hogy a városokban növeljék az átbocsátóképességet és csökkentsék a szennyezést. Ezzel a technológiával közúti jelzőeszközök kiszámítják a kedvező sebességet, hogy a forgalmi mozgékonyságot javítsák, amit a vezetőnek ajánlhat, vagy adott esetben kötelezheti rá. Ezt a technológiát tesztelték Torinóban a Fiat, PSA, Jaguar és a Renault támogatásával.
Nyilvánvalóan fokozatos lépésekre lesz szükség ahhoz, hogy az automatizált autók felé haladjunk. Az ITS amerikai vezetői számos lehetőséget ajánlottak a bevezetésre. Az egyik lehetőség az autópályák automatizálására, hogy elsősorban az állami buszokra és karbantartó járművekre felszerelni ezeket a rendszereket. Másik alternatíva, hogy a nagy magán áruszállító telephelyeken kezdenék bevezetni. Másik felajánlás, hogy az állami autópályákon kerüljön bevezetésre. A kutatások tovább folynak. A fő probléma nem a technológiában van, hanem a már említett jogban.
Forrás: Steven Ashley. Smart cars and automated highways (Mechanical engineering, 2009 május)
Önállóan vezető autók
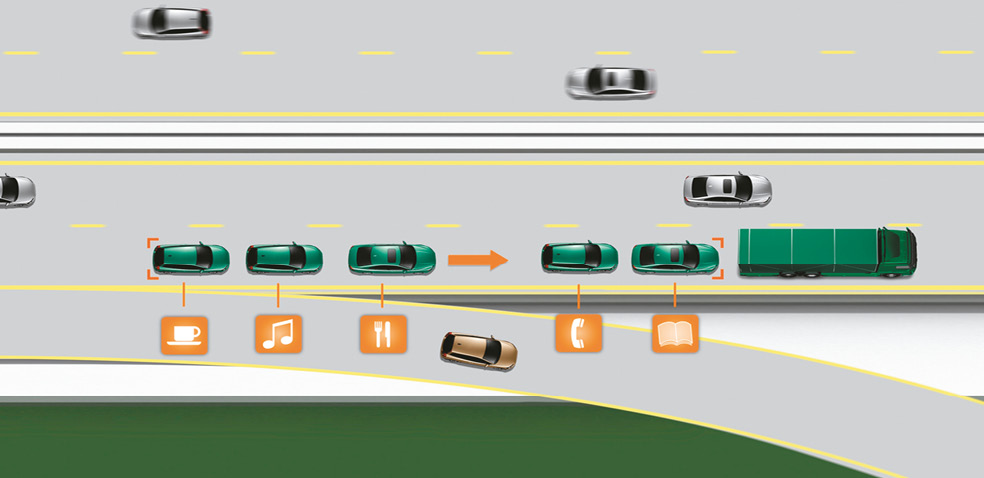
Az Európai Unióban új kutatási projektet indítottak „Sartre” (Safe Road Trains for Environment) néven, amely az önállóan vezető autókkal foglalkozik – számoltunk be az Autótechnika 2009/11-es számában. Emlékeztetőül: a projektben a svéd műszaki kutatóintézet és az aacheni műszaki főiskola autóipari intézete mellett a Volvo is szerepet vállalt. A résztvevők egy olyan technológiát fejlesztettek ki és tesztelnek, mellyel az autók a jövőben önállóan haladhatnak menetoszlopban az autópályán. Most két képpel is szemléltetjük a projekt lényegét.
A menetoszlop élén haladó járművet hivatásos sofőr vezeti, amely lehet egy előre meghatározott útvonalat követő teherautó vagy autóbusz. A menetoszlopba csatlakozás után a többi autó vezetője más dolgokkal is foglalkozhat, például dolgozhat, olvashat, zenét hallgathat, filmet nézhet, telefonálhat, vagy egyszerűen csak pihenhet. Az autók navigációs rendszere kijelzi a közelben haladó menetoszlopokat, és azok úti célját. Menet közben további autók is csatlakozhatnak a konvojhoz. Bárki szabadon elhagyhatja menet közben a menetoszlopot, ilyenkor a távozó autó mögötti autó automatikusan felzárkózik a többiekhez, így megszüntetve a keletkezett rést.