
Radar segítségével működő asszisztens rendszerek
A radarok mikrohullámokon sugároznak, ezért ez az egyik legbiztonságosabban alkalmazható szenzor, amely rossz időjárási viszonyok esetén is képes biztonságosan működni, míg a videó- és ultrahangos készülékek nem, vagy csak bizonytalanul alkalmazhatóak, holott ekkor lenne rájuk a legnagyobb szükség.
A radartechnika egyre inkább áthatja a közlekedés egész területét, de leginkább az autóiparban nő egyre nagyobb mértékben a szerepe. Napjainkban az autógyártók a távoli objektumok felismerését radar rendszerek beépítésével teszik lehetővé, így az akadályok felismerése, a követési távolság biztonságos szinten tartása, a sávváltások biztonságossá tétele válik lehetővé. A vezetőt segítő rendszerek egyrészt az emberi érzékelés javításával, másrészt a vezetéssel járó feladatok átvállalásával teszik biztonságosabbá a vezetést. A támogató rendszerek a jármű vezetésébe való beavatkozásuk szerint figyelmeztető/tájékoztató és autonóm működésű rendszerek lehetnek. A vezető tevékenysége szempontjából az első csoportba sorolt rendszerek közös jellemzője, hogy információikkal a vezetőt ösztönzik beavatkozásra, a második csoportba soroltak pedig közvetlenül befolyásolják a jármű viselkedését a motor nyomaték változtatásával, szükség esetén a fékrendszerbe való beavatkozással, a vezető akaratlagos cselekedetei nélkül.
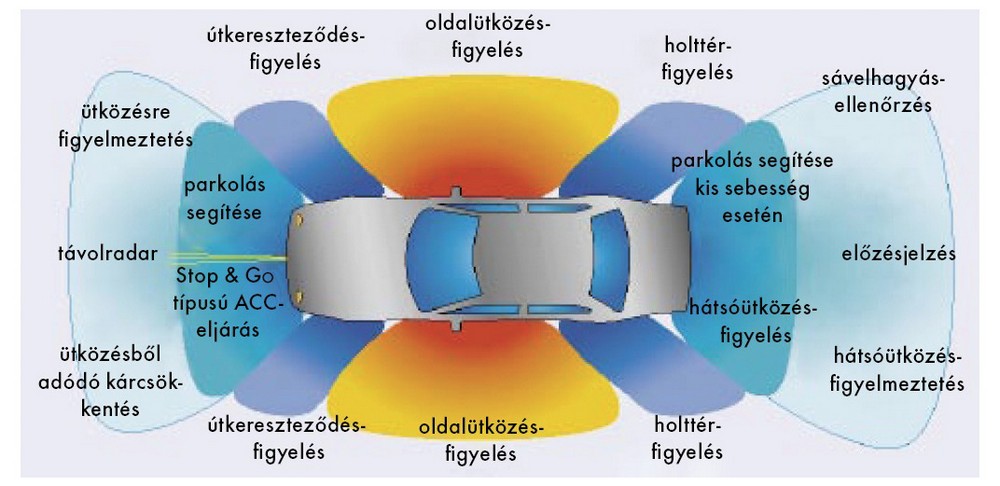
Gépjárműveken alkalmazott radarok
Kereszteződési ütközésjelző
A kereszteződési ütközésjelző közúti infrastrukturális elemekkel együttműködve, valamint felhasználva a jármű fedélzeti radarjait a rendszer felméri a csomóponton áthaladó többi jármű várható haladási irányát és sebességét, és riaszt egy esetleges ütközés kialakulásának veszélyekor. Ilyen esetekben szükség esetén a gépjármű haladási irányának és sebességének változtatásával elkerüli a baleset bekövetkeztét
Ütközés előtti érzékelés (Pre-crash)
A Pre-crash rendszer arra az elvre épül, hogy egy esetleges baleset észlelése és bekövetkezése közti időt a passzív biztonságtechnikai eszközök nem tudják kihasználni, mivel csak a baleset megtörténte után lépnek működésbe. Ezzel szemben a környezetérzékelő rendszerekkel felszerelt járművek képesek előre jelezni egy lehetséges ütközés bekövetkezését. Ilyen esetekben a pre-crash rendszer felkészül az ütközésre, megfeszíti az öveket, készenlétbe helyezi a fékeket, amely azt jelenti, hogy a fékbetéteket közelíti a féktárcsához, így fékezés esetén rövidebb idő alatt kialakul a fékhatás, figyelmeztető jelzést küld a vezető részére a veszélyhelyzetről, ha mégis sikerül a balesetet elkerülni, mindent visszaállít az eredeti állapotba, ha pedig bekövetkezik a balesetet, értékes másodperceket nyernek az utasok. Egyes rendszerek képesek beavatkozni a jármű irányításában, amikor az ütközést már nem lehet elkerülni automatikusan működésbe hozzák a fékeket, csökkentve így a becsapódás sebességét.
Stop and Go
A Stop and Go rendszer az ACC rendszer továbbfejlesztéséből jött létre, fő funkciója, hogy fenntartsa az elöl lévő járműig mért távolságot a szabályzószervek használatával. Annak az adottságnak a következtében, hogy a jármű teljesen megállítható, a Stop and Go funkció tovább növeli a sebességtartó funkció felhasználhatóságát azáltal, hogy városi forgalomban a zsúfolt utakon is használható. A fő különbség a mai használt ACC rendszerekhez képest az, hogy a Stop and Go rendszer képes a járművet teljesen megállítani, majd amennyiben az előtte lévő jármű továbbhalad, felgyorsítani. A teljes megállás utáni gyorsításhoz azonban a vezető beavatkozására is szükség van. Így a jármű csak biztosan akkor indulhat el, ha a környező forgalmi rend tartósan helyreállt. Mivel követelmény a kis hatótávolságú észlelés és a rövid reakcióidő, a rendszerhez néhány fajta kis hatótávolságú érzékelőre is szüksége van. A rendszernek képesnek kell lennie megállítani a járművet ha az előtte haladó teljesen lefékezi járművét, valamint kezelni azokat a helyzeteket, amikor hirtelen bevágnak a jármű elé.
Holttér figyelő és sávváltást segítő rendszer
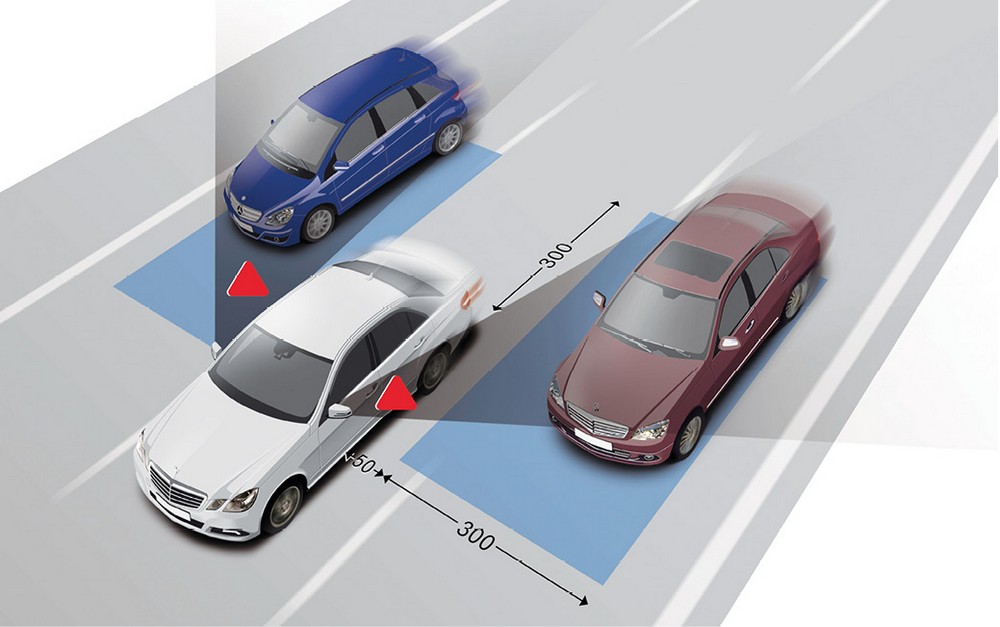
A holttér figyelő berendezés segíti a vezetőt a sávváltások biztonságos végrehajtásában. Radarszenzorok segítségével nem csupán a holtteret figyeli, hanem az autó mögött 50 méteres körzetben nagy sebességgel, hirtelen feltűnő járműveket is.

Tükörbe épített jelzőfény villogni kezd ha a járművünk holtterében egy másik jármű tartózkodik
Amikor a rendszer egy másik járművet észlel ezen a területen belül, akkor erről egy, a külső visszapillantó tükörben felvillanó LED jelzőfény informálja a vezetőt, nehogy bevágjon az érkező jármű elé. Abban az esetben, ha a vezető a figyelmeztető jelzés ellenére mégis megpróbál sávot váltani, a jármű a fényjelzést kiegészíti egy hangjelzéssel is, nyomatékosabban felhívva ezzel a sofőr figyelmét a veszélyhelyzetre.
A holttér figyelő rendszer által lefedett terület
Ezek a rendszerek közelradart vagy ultrahanggal működő szenzorokat használnak, a felügyelendő távolságtól függően. Az ilyen berendezések kalibrációt nem igényelnek, mivel a beépítési környezetük és antennájuk iránykarakterisztikája meghatározza az érzékelési irányt és belátható távolságot. A szenzorok általában a jármű hátsó lökhárító burkolata alatt kerülnek elhelyezésre.
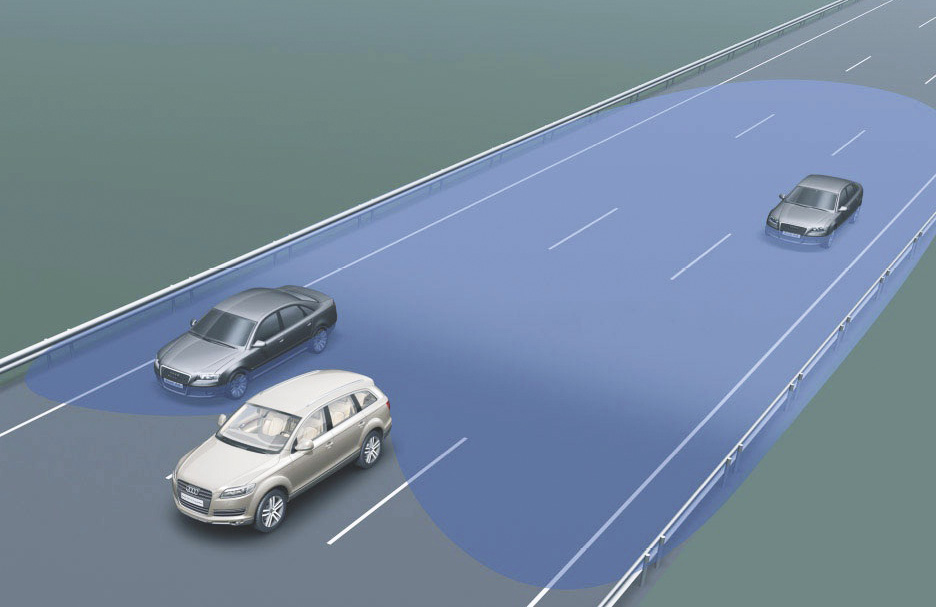
Az Audi által alkalmazott sávváltást segítő asszisztens által „látott” terület. Amikor ezen területen belül egy másik jármű tartózkodik és a sofőr jelzi sávváltási szándékát, a rendszer figyelmeztető jelzést küld
Parkolást segítő rendszer
A parkolást segítő rendszer magában foglalja a parkolási manőver megtervezését, a parkolóhely nagyságának vizsgálatát. A parkolás segítő célja, hogy támogatást nyújtson a jármű vezetőjének a parkolási manőver során. Ez többféleképpen is megvalósítható. A legegyszerűbb az optikai vagy akusztikus úton szolgáltatott információ, amennyiben akadály található a gépjármű előtt vagy mögött. Az egyik lehetősége, hogy a rendszer különböző frekvenciájú hangjelzést küld a vezetőnek attól függően, hogy az akadály milyen távolságra van. Egy másik lehetséges megoldás a különböző színeket használó optikai kijelző. Ezen a szinten a jármű vezetőjének egyedül kell eldöntenie, hogy a kívánt parkolóhely megfelel-e a járműnek és a tervezett parkolási manővernek. A következő szinten a rendszer feladata, hogy információkat szolgáltasson a parkolóhelyről, megfelelő méretű-e a jármű számára. A legmagasabb szinten a rendszer önmaga végzi a parkolás. A sofőrnek csak a be kell kapcsolnia a rendszert és jeleznie a parkolási szándékot az irányjelző használatával. Ilyenkor a rendszer a radarszenzorok segítségével feltérképezi a lehetséges helyeket, és ha megfelelőt talál, értesíti a vezetőt. Ezután megtervezi a szükséges manővereket, kormánylefordítás és szükséges haladási távolságok mértékét. Automata sebességváltóval szerelt járműveknél, csak a megfelelő sebességfokozatot kell kiválasztanunk és a rendszer automatikusan beparkol a kiválasztott helyre, a sofőrnek mindössze annyi feladata van, hogy a manőver végén lefékezze a járművet.
Adaptív követési távolság tartás (ACC)
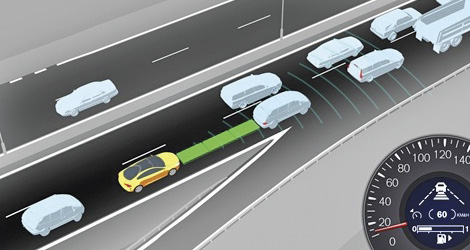
Az adaptív sebességszabályozó a hagyományos sebességszabályozó berendezés továbbfejlesztett változata. Az automatika nemcsak a sebességet tartja, hanem az előttünk haladó autóhoz mért, előre beállított követési távolságot is. Működése biztonsági szempontokból behatárolt, minimális működési sebesség Stop and Go funkció nélkül 30 km/h, maximális működési sebesség 180 km/h, maximális lassító képesség 4 m/s2. A rendszer speciális radaros érzékelővel méri a jármű és az előtte haladó közti távolságot.
Amennyiben a távolság túlságosan lecsökken, a rendszer először finom gázvisszavétellel csökkenti a sebességet, majd ha ez nem elegendő, akkor automatikus fékezést vált ki, mégpedig a jármű maximális lassulásának mintegy 40%-áig. Amikor ismét szabad az út, az autó gyorsítani kezd és adaptív sebességszabályozója segítségével felgyorsít az eredetileg beállított sebességre. Amennyiben a fékezési folyamatban a berendezés által kifejtett maximális lassulás nem elegendő, azaz a jármű nekiütközne az előtte haladó másik járműnek, a rendszer azonnal akusztikus jelzés küld, így figyelmeztetve a vezetőt, hogy fékezzen.

Bekapcsolt ACC-nél a fedélzeti számítógép kijelzőjén az itt látható ikon jelenik meg. (2. kivetési távolság fokozattal)
A sofőr négy előre definiált program közül választhat. Az 1. fokozat kis távolságot tart az előttünk haladó járműhöz, ezáltal intenzív lassulást és gyorsulást produkál. Az úttest szabaddá válásakor rövid idő alatt gyorsít fel a beállított haladási sebességre. A 2. és 3. távolság beállítással tempósan tarthatjuk a lépést az előttünk haladóval. A 4. fokozat autópályákon hasznos, ilyenkor a rendszer nagyobb követési távolságot tart az elől haladó mögött.
Az ACC nem reagál álló akadályokra, szembejövő járművekre, és biztonsági előírások miatt nem szabad használni, rossz időjárási körülmények között. A rendszer nem veszi el a felelősséget a jármű vezetőjétől, ezért a sebesség és a követési távolság figyelemmel kíséréséért bekapcsolt adaptív sebességszabályozó esetén is a járművezető felelős. A rendszer állapotáról a műszerfalon található kijelzőről kapunk információt.
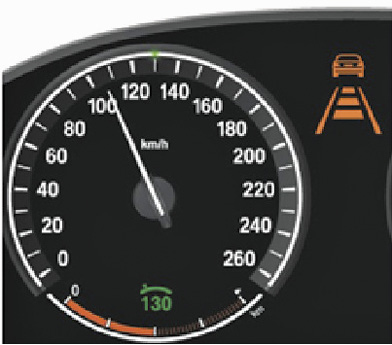
A képen látható, hogy a beállított sebesség 130 km/h. Azonban mivel a rendszer egy másik, előttünk lassabban haladó járművet érzékelt (108 km/h), ezért a számítógép által vezérelt asszisztens csökkentette a sebességet, és az előre beprogramozott 130 km/h helyett a beállított 3. távolság fokozat került aktiválásra. Így nem a sebesség a döntő paraméter, hanem a két jármű között mért távolság. Amikor szabaddá válik az út, az autót ábrázoló kis ikon elalszik, és a jármű automatikusan felgyorsít a beállított sebességre.
Az ACC nagy segítség a vezetőnek például autópályán egy lassan haladó torlódás esetén. Ilyenkor a rendszer automatikusan követi az előttünk haladó járművet, mentesítve ezzel a sofőrt az állandó egymás utáni fékezés és gyorsítás monoton folyamatától


