Magnetorezisztív ABS kerékforgás-érzékelők
Az Autószaki 1998/4. számában Csúri György tollából megjelent egy cikk az indukciós kerékfordulatszám-érzékelők kiváltására használt kétvezetékes, HALL-effektus alapján működő ABS kerékfordulatszám-érzékelőkről. A továbbiakban egy szintén kétvezetékes kerékforgás-érzékelőről lesz szó, azonban ennek a működési elve a magnetorezisztív hatáson alapul.

1. ábra: a magnetorezisztív kerékforgás-érzékelő és a mágneses csapágy-tömítőgyűrű
Az ismertetés előtt felmerülhet az a kérdés, hogy egyáltalán miért használnak az indukciós kerékforgás-érzékelők helyett más szenzorokat? Ezen szenzorok, az elvükből adódóan, azaz a mágneses tér változása által létrejövő indukciónak köszönhetően hoznak létre szinuszos feszültségjelet. Egy adott keréksebesség alatt azonban nincs kiértékelhető sebességjel, továbbá érzékenyek a szenzor és a póluskerék közötti légrés értékére.
A Continental Temic által számos gépjárműgyártó részére (BMW, Opel, Ford) gyártott szenzorváltozatok – a későbbiekben bemutatott módon – már elinduláskor is küldik a keréksebesség-információkat, a légrés akár 3,5–4 mm-ig növekedhet a szenzorvég és a jeladótárcsa között, anélkül hogy a szenzor által küldött sebességjel romlana. Az újabb kiviteleknél már a kerék forgásiránya is meghatározásra kerül. A gépjármű hátrameneti állapota fontos paraméter a lejtőn való elindulást segítő rendszereknek (Hillholder function), illetve navigációs rendszerek részére is hasznos információ a pontos helyzetmeghatározáshoz, időszakosan kieső GPS-jelek esetén. Napjainkig a különböző magnetorezisztív szenzorváltozatokból több mint 100 millió darabot gyártottak!
A számos szenzorváltozat között alapvető különbség, hogy léteznek olyan típusváltozatok, melyek a már az indukciós kerékforgás-érzékelőknél használt póluskereket használják jeladó tárcsaként, illetve vannak olyan változatok is, ahol a kerékcsapágy tömítőgyűrűjére integrált északi és déli pólusokkal ellátott tárcsát használják jeladó tárcsaként (1. ábra). Abban az esetben, amikor a jeladó tárcsa a kerékcsapágy tömítőgyűrűje, akkor a gyűrű állapota egy ellenőrző kártyával ellenőrizhető. Használatával a csapágy fordított beszerelése elkerülhető, illetve a mágneses pólusok sérülése felismerhető (2-3. ábra). Az ilyen kódtárcsával ellátott csapágyak beszerelésénél tilos a tárcsa felületét megütni, ellenkező esetben a mágneses pólusok sérülhetnek.
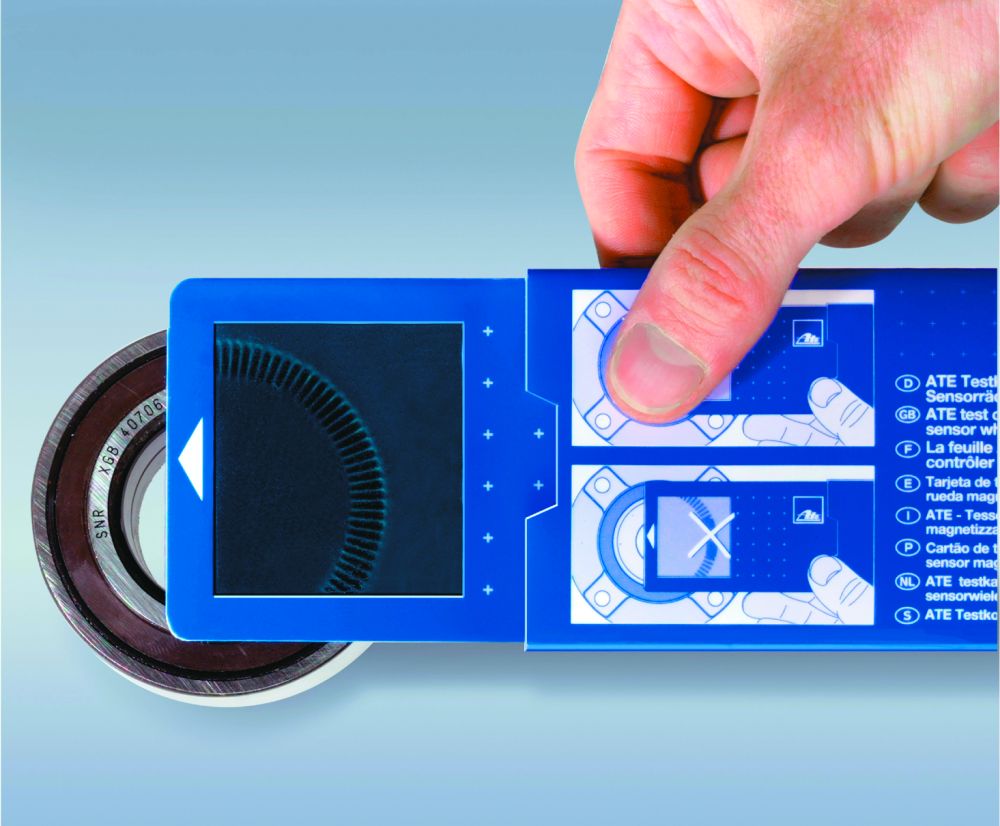
2. ábra: a mágneses tömítőgyűrű helyzetének vizsgálata ellenőrző kártyával
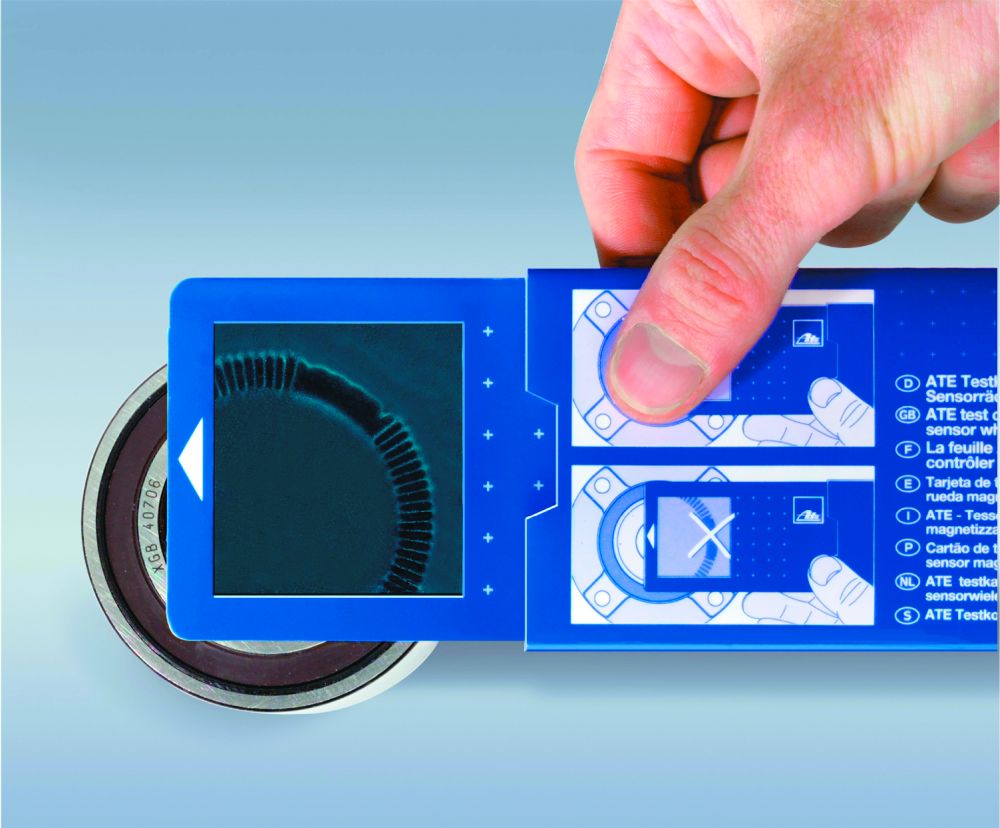
3. ábra: sérült csapágy-tömítőgyűrű
A szenzor működési elve voltaképpen egyszerű, mivel a magnetorezisztív szenzorok a ferromágneses anyagoknak azt a tulajdonságát használják ki, hogy ezeknek az anyagoknak mágneses tér hatására megváltozik az ellenállásuk. Az ellenállás nagyságát az áram és a mágneses erővonalak iránya között bezárt szög határozza meg. Legnagyobb az ellenállás, ha az áram és a mágneses tér iránya párhuzamos egymással. Az áram irányára merőleges mágneses tér eredményezi a legkisebb ellenállást. Mivel az ellenállás-változás nem lineáris a mágneses tér változásával, a szenzorok kialakításakor különböző eljárásokkal kompenzálják a linearitási és a hőmérséklet-változásból adódó hibát. Különösen jó magnetorezisztív tulajdonsággal rendelkezik a permalloy (20%Ni, 80%Fe). A szenzor két részből áll, az első áramköri elemen található a Wheatstone-hídba kötött ellenállás-hálózat, melynek a mágnesestér-változás hatására létrejövő szinuszos feszültségjelét a második áramköri elem feldolgozza és létrehozza a szenzor négyszög kimenő jelét. A szenzor kimenő jele – a HALL elven működőével megegyezően – kétféle áramérték. Ugyanis a szenzor 7 és 14 mA között „kapcsolgat”. A továbbiakban érdemes a szenzort egy kicsit részletesebben is górcső alá venni. A szenzor voltaképpen két külön tokozásban kialakított, egymással villamos kapcsolatban lévő áramköri elemet tartalmaz. A 4. ábrán átható néhány Philips OH191-es áramkör még mielőtt a műanyag házat köré fröccsöntenék.

4. ábra: szenzor áramkörök a műanyag ház fröccsöntése előtt
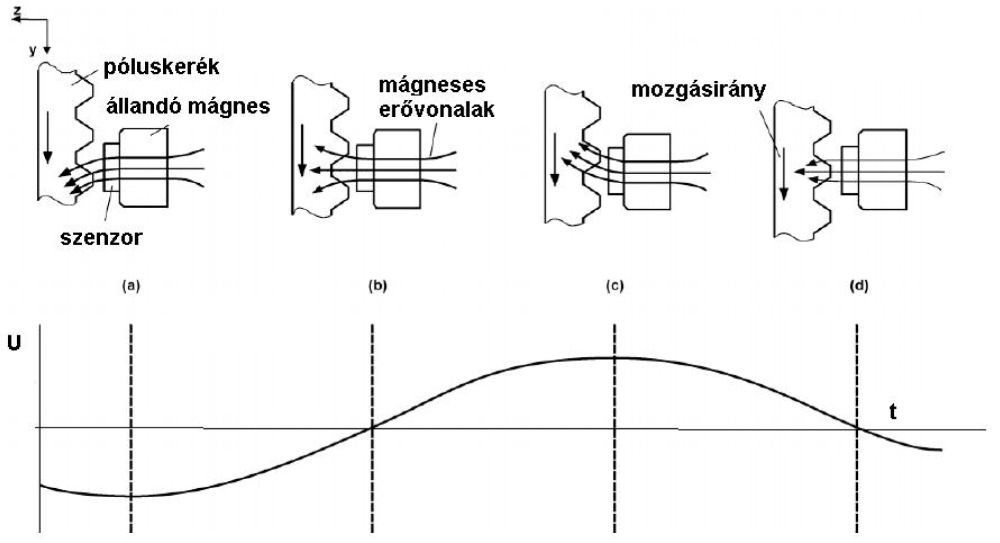
5. ábra: a Wheatstone-híd kimenő feszültsége a mágneses erővonalak helyzetétől függően
A szenzor felső négyszög tokozása tartalmazza a magnetorezisztív anyagból kialakított Wheatstone-hidat. A Wheatstone-híd szilíciumhordozóra felvitt fésűs elrendezésű magnetorezisztív anyagú ellenállás-hálózat. Az 5. ábrán egy elvi vázlat látható, mely az egyenfeszültséggel megtáplált Wheatston-híd kimenetén mérhető feszültség jelalakját magyarázza. A híd kiegyenlített állapotában – amikor a mágneses erővonalak nem hajolnak el, azaz a póluskerék foga, illetve fogárka van közvetlenül a szenzor előtt – a kimeneti feszültség 0 V, a póluskerék ettől eltérő helyzetében a kimeneti feszültség 0 V-tól eltér. A szenzoráramkör alsó tokozása a kiértékelő elektronikát tartalmazza. A 4. ábrán látható a két műanyag tok között a Wheatstone-híd négy kivezetése, illetve a kiértékelő elektronika tokozásából lefelé kilép két kivezetés. A kiértékelő elektronikának a blokkvázlata a 6. ábrán látható. A blokkvázlaton feltüntetésre került a szenzor Wheatstone-hídjának tápfeszültség-ellátását biztosító tápegység. A híd szinuszos kimenő feszültsége az erősítő áramkörbe jut, majd mivel a jel általában valamekkora zajjal terhelt, ezért ha a jel átlagértéke az átbillenési feszültség közelében van, akkor a zaj ide-oda billentené az áramkört, s végül is a zaj amplitúdója szabná meg, hogy mekkora feszültségnél ,,nyugszik meg” az egyik végállapotában. Ezek elkerülése érdekében alkalmaznak egy Schmitt trigger áramkört, melynek a hiszterézise miatt (eltérő az egyik irányba történő átbillenés feszültsége, mint a másik irányba) létrejön a helyes, zavarmentes négyszögfeszültség. Ilyen zavart okozhat a jelben például fékezés közben létrejövő vibráció is. A szenzor kimenetén látható a kétértékű áramforrás, mely végül is biztosítja a szenzor kimenő jelét, azaz a már említett kétféle áramértéket. A gyári blokkvázlat nem mutatja az órajel-generátort, a szenzorba beépített fordított bekötés és túlfeszültség-védelmi, illetve a hőmérséklet-kompenzáló áramköröket.
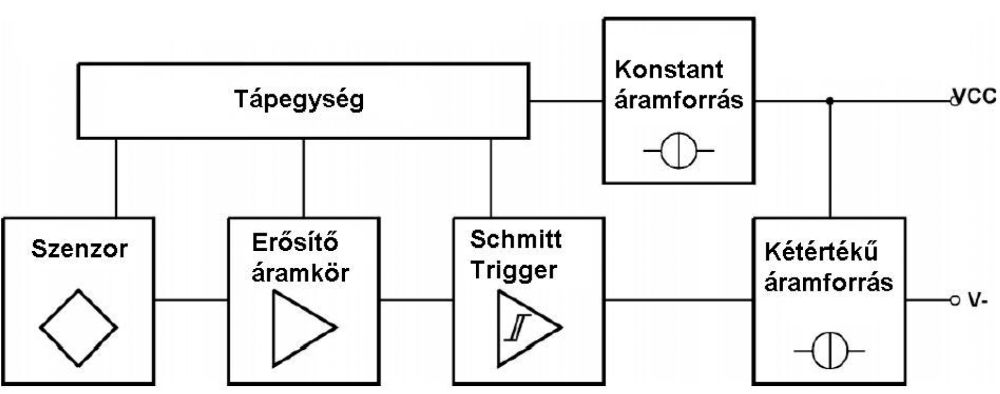
6. ábra: a szenzor felépítésének blokkvázlata
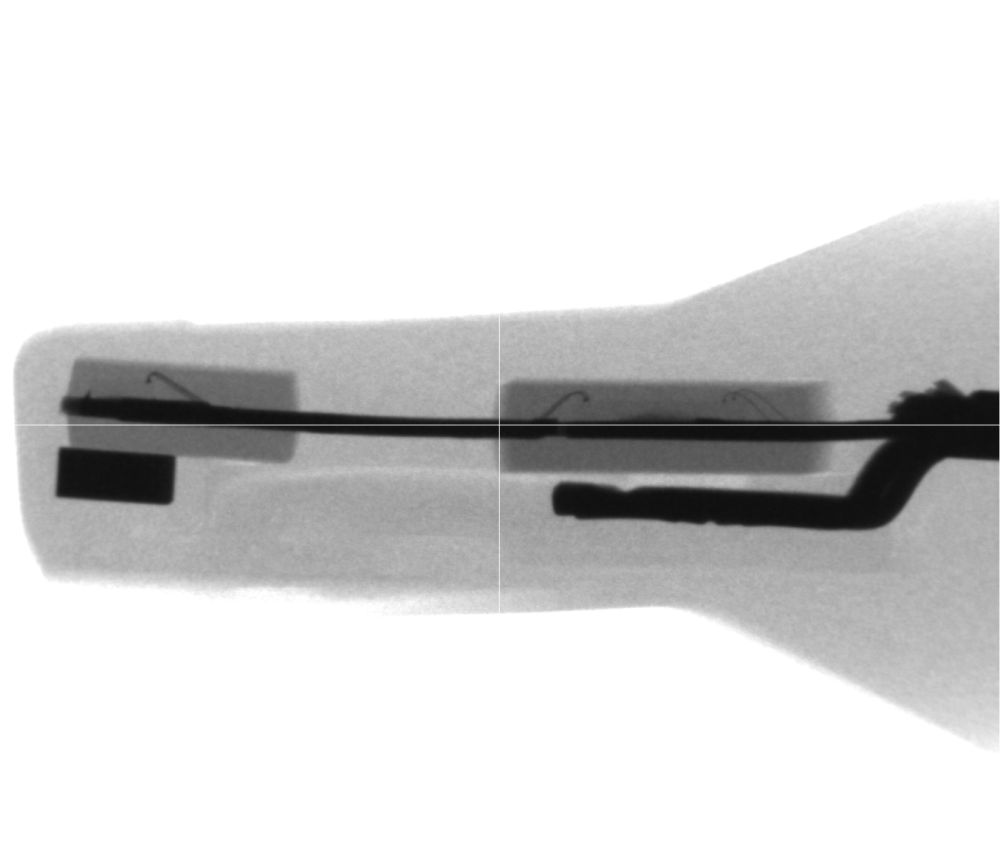
7. ábra: a szenzor röntgenképe
A 7. ábrán látható röntgenképen szintén áttekinthető a már az előzőekben bemutatott belső elrendezés. A röntgenkép bal oldalán látható a Wheatstone-hidat tartalmazó áramkör a ráerősített állandó mágnessel. A kép jobb oldalán az ezzel az áramkörrel összekapcsolt kiértékelő elektronika található. Megjegyzendő, hogy az állandó mágnes méretétől függ, hogy a szenzor a kerékcsapágy tömítőgyűrűjébe integrált mágneses tárcsával vagy ferromágneses póluskerékkel használható. Nagyobb geometriai mérettel rendelkező mágnes alkalmazásakor a szenzor póluskerékkel történő működéshez illesztett. Ha a csapágy mágneses tömítőgyűrűjével tud működni a szenzor, akkor a Wheatstone-híd tokozása mellett lévő kis mágnesnek (kb. 4x2x1 mm méretű) csak a kialakuló mágneses tér ,,stabilizálásában” van szerepe. Ennek megfelelően ezt a mágnest a szakirodalom stabilizáló mágnesnek nevezi.
Az eddigiek alapján belátható, hogy a szenzor áramfelvétele – a beleintegrált kétértékű áramgenerátornak köszönhetően – 7 és 14 mA között ,,ugrál” a kerékfordulatszám függvényében. A négyszög feszültségjel úgy jön létre, hogy az ABS elektronikában a szenzorral sorba kötötten megtalálható egy terhelő ellenállás is. Ezen az ellenálláson az áramváltozás hatására már négyszög feszültségjel
jön létre. Az indukciós kerékfordulatszám-szenzorral ellentétben ezen szenzor már a gépjármű álló helyzetében is szolgáltat jelet. A kerék pozíciójától függően alacsony (7 mA) vagy magas (14 mA) áramerősség jön létre, ezáltal a gépjármű álló helyzetében is a szenzor működése már ellenőrizhetővé válik az öndiagnosztika számára!
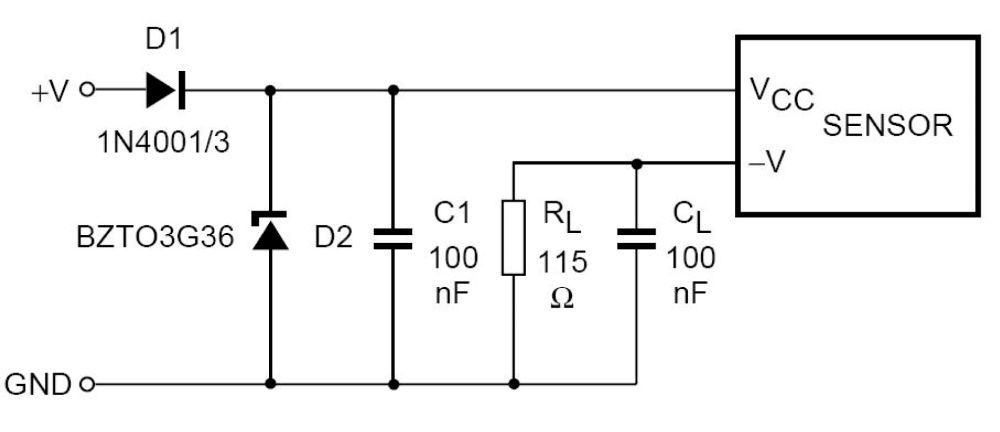
8. ábra: a szenzorvizsgálathoz javasolt tesztáramkör
A jeladó vizsgálható természetesen tesztműszerrel, de kiszerelt állapotban is. Kiszerelt állapotban a jeladóra tápfeszültséget kell kapcsolni, amikor a szenzor előtt mágnest mozgatunk, akkor a szenzorral sorba kötött árammérőn 7, illetve 14 mA körüli áramfelvételt lehet mérni. A 8. ábrán látható a szenzorvizsgálathoz az áramkörgyártó által javasolt bekötési rajz. A szenzorral sorba kötve egy 115 Ω-os terhelő ellenállás alkalmazását javasolja a gyártó. Az ábra alapján a szenzorkimenetnél a terhelő ellenállás és a test közti feszültséget oszcilloszkóppal megmérjük, akkor nagyságrendileg 0,8–1,6 V között változó négyszögfeszültséget mérhetünk. A gyakorlatban a vizsgálatot lefolytathatjuk terhelő ellenállás nélkül is egy sorba kötött árammérővel. A szenzor unipoláris, azaz csak egyféle bekötés esetén működik helyesen, fordított bekötésnél a szenzor áramfelvétele többszöröse a jelképzésnél mérhető áramértékeknek. A szenzor fordított bekötés ellen védett, de csak a 115 Ω-os terhelő ellenállás alkalmazásakor viseli ezt el hosszabb ideig!
Az ismertetett áramkör alkalmazásával kialakított érzékelő főbb jellemzői:
– tápfeszültség: 0,5–16 V-ig
– kimeneti áram alacsony értéke: 5,6–8,4 mA
– kimeneti áram magas értéke: 11,2–16,8 mA
– környezeti hőmérséklet: -40-tól 85 °C-ig
– a vezérlő mágneses tér frekvenciatartománya: 0–25 kHz.
Az előzőekben ismertetett szenzor továbbfejlesztett változatai már a kerék forgásirányát, a szenzor és a jeladótárcsa közötti légrés nagyságát is érzékelik. A mért adatokat a már ismertetett kerékfordulatszám-jelek közé beszúrt adat-bitek segítségével közlik. A következőkben tekintsük át a szenzorok ezen típusát is.
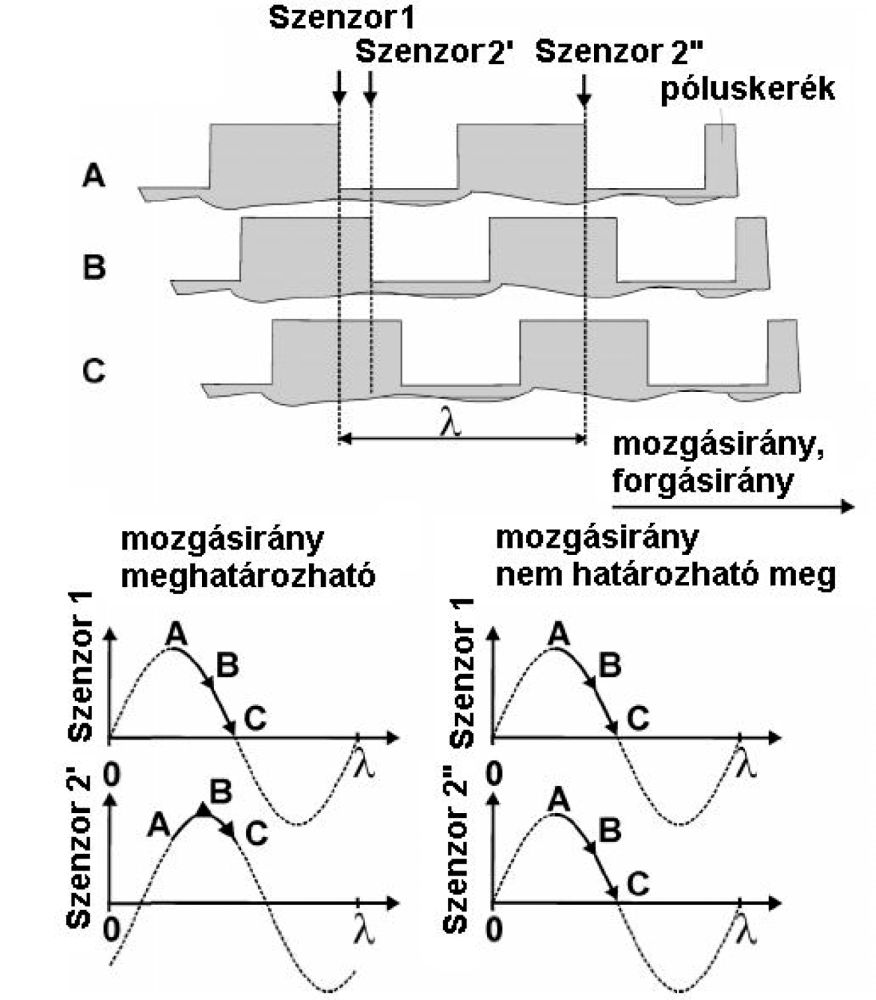
9. ábra: a kerékforgásirány meghatározása két szenzor segítségével
A kerékforgásirány meghatározásánál felmerül az a probléma, hogy ehhez bizony legalább két szenzorra lenne szükség. Ha a szenzorokat elég közel helyeznénk el egymáshoz – azaz póluskerék alkalmazásakor egy fog és fogárok távolságnyin belül, vagy mágneses csapágytárcsa esetén egy északi és déli póluson belül –, akkor logikai áramkörök alkalmazásával a két szenzor kimeneti jele alapján el lehetne dönteni a kerék forgásirányát (9. ábra). Azonban egy szenzor alkalmazásával ez hogy lehetséges? Az alapelv voltaképpen egyszerű. A már ismertetett Wheatstone- hidat a tervezők „megfelezték”, azaz voltaképpen egy tokozáson belül két egymástól független magnetorezisztív ellenállás-hálózatot hoztak létre. A két fél híd kimenő feszültségének egymáshoz képesti eltolódásából a kerék forgásiránya meghatározható. Annyit érdemes megjegyezni, hogy a feszültségjelek közötti fázisszög meghatározásához a jelek mind összegző, mind kivonó áramkörökön futnak keresztül és logikai kapcsolások segítségével kerül eldöntésre a kerék forgásiránya. A mérőhidak kimeneti feszültségének amplitúdójából a jeladókerék és a szenzor közötti távolság is meghatározható. A szenzor által mért adatokat alacsony keréksebességnél a két sebességimpulzus közé szúrja be a szenzorelektronika. Azonban a keréksebességjel magas áramértéke ennél a szenzornál már nem 14 mA, hanem 28 mA! Az áram alacsony értéke változatlanul 7 mA. A kódolt információ úgynevezett Menchester-kódolású.
Ennél a kódolási formánál a kódoló minden bit-időt két egyenlő részre vág, ahol a bináris „0” küldése esetén az első intervallumban magas, míg a második alatt alacsony szint jelenik meg a vonalon. Bináris „1” elküldése esetén az előbbi folyamat inverze valósul meg, az első intervallumban alacsony, a másodikban pedig magas szint kerül a csatornára. Azaz ha a bit-idő közepén a jel felfutó, akkor az 1-et, ha lefutó, akkor az 0-t jelent. Mivel minden bit-idő közepén lesz egy átmenet, így a vevő könnyen összeszinkronizálódhat az adóval. A Manchester-kódoló hátránya, hogy a felére csökkent impulzusszélesség miatt a bináris kódoláshoz elegendő sávszélesség kétszeresét igényli. Azonban az esetleges hibás adatátvitel könnyedén kiszűrhető, mivel ha a bit-idő közepén nincs le- vagy felfutó jel, akkor az hibaként detektálható. A 10. ábra felső részén látható a jelfolyam, melyen jól nyomon követhető, hogy az ilyen típusú szenzor már három áramszinten küldi a jeleket az elektronikának. A sebességjel 7 és 28 mA között, míg a sebességjelek között lévő kódolt információ 7 és 14 mA között változik.
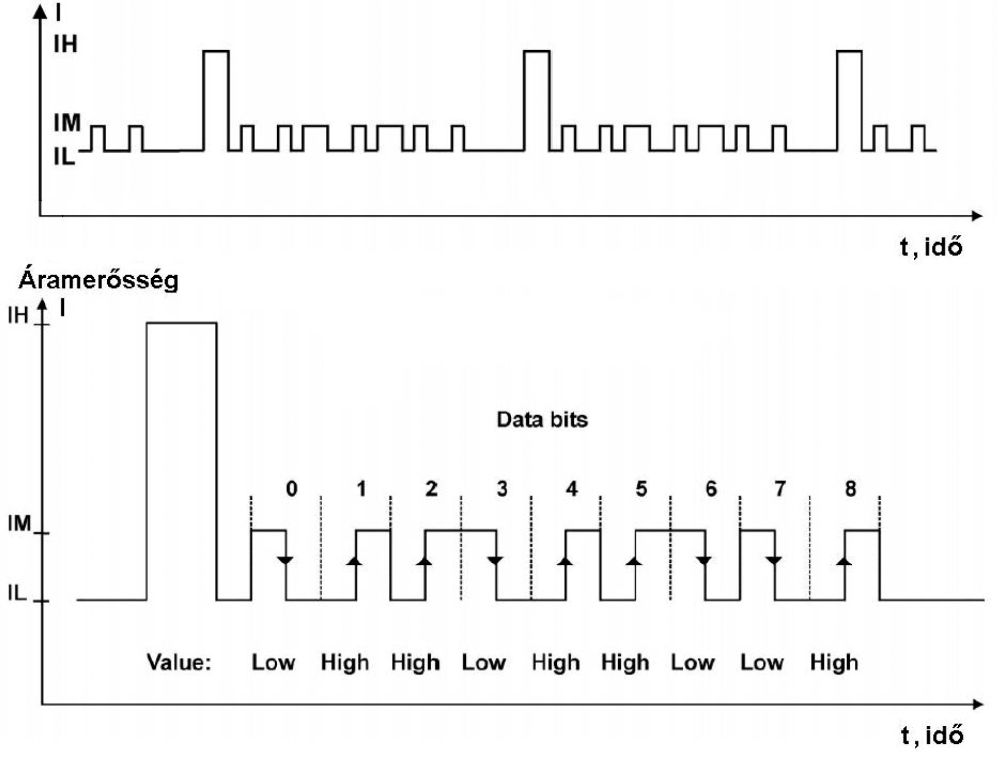
10. ábra: a keréksebességjelek közötti adatfolyam
Az ábra alsó részén a kódolt rész kinagyított képe látható. A 28 mA értékű, magas kerékfordulatszám-jelnek a fordulatszám-információn túl szinkronizálás is a feladata, mivel utána következik a 9 adat-bit. Egy bit-idő 50 μs hosszúságú. A 10. ábra alsó részén 0-tól 8-ig számozott adatbitek magyarázata a következő. A 0-tól 3. bit-ig az elektronika számára biztosít információkat a magnetorezisztív ellenállás hálózaton mérhető feszültségamplitúdó nagyságáról. Ebből számunkra a 0. bit kiemelt fontosságú, mivel annak magas értéke azt jelzi, hogy a légrés a jeladótárcsa és a szenzor között túl nagy. A légrés további növekedése esetén a szenzor már nem lesz működőképes. A 4. bit a kerék forgásirányát jelzi, annak magas értékekor a kerék forgásiránya pozitív, azaz a póluskerék forgásiránya a 9. ábrán látható mozgásiránnyal megegyező. Az 5., 6. és 7. bit a már előbb említett légrést számszerűsíti. Hibátlan jelképzés fennálló lehetséges légrésnagysága 8 részre van felosztva (3 bittel ennyi adat kódolható), ennek a pontos értékét a szenzor közli az elektronikával. Így a légrés értéke és esetleges változása pontosan mérhetővé válik. Ezen mérési adatok így mind a gyártás utáni teszteknél, illetve gépkocsiba beszerelt állapotban is felhasználhatóak. A 8. bit a kódsorozat esetleges adathibái kiszűrésében jut szerephez (páros paritás). Lassú keréksebességnél és a kerék álló helyzetében a fenti kommunikációs protokoll 150 ms-enként ismétlődik. Ekkor mivel a keréksebesség-jelek viszonylag lassan vagy egyáltalán nem követik egymást, a protokollindítást a már említett 28 mA értékű keréksebességjel helyett egy 14 mA-es jel indítja, mivel ez elengedhetetlen a szinkronizáláshoz. Gyors keréksebességnél, amikor a sebességjel közé ,,nem fér be” a teljes adatsor, akkor az első 3 bit hosszúságra rövidül le a közlendő információ. Ennél nagyobb sebességeknél, már csak a keréksebességjelek ,,élnek”, az adatsor továbbítása megszűnik.
Az ismertetett áramkör alkalmazásával kialakított érzékelő főbb jellemzői:
– tápfeszültség: 4,5–18 V-ig
– kimeneti áram alacsony értéke: 5,8–8,4 mA
– kimeneti áram középső értéke: 11,7–16,8 mA
– kimeneti áram magas értéke: 23,5–33,5 mA
– adat-bitek periódusideje (bit-idő): 50 μs
– alacsony keréksebességnél az adatprotokoll ismétlési ideje: 150 ms.
Remélem, azok a kitartóak, akik a cikket végigolvasták, számos új ismerettel lettek gazdagabbak. Igaz ugyan, hogy az ismertetett szenzortípusok hibás működésének felismeréséhez talán nem is szükséges ennyire mélyen belelátni a lelkivilágukba, de legalább ismét szembesülhetünk azzal a ténnyel, hogy ez elektronika ma már mindenbe beleüti az orrát.