Adaptív xenonfényszóró motorkerékpárhoz
A ZIZALA Lichtsysteme GmbH által a BMW motorkerékpárokhoz kifejlesztett adaptív fényszóró xenonprojektoron alapul. Billenő lencséjével a motor bólintó mozgását, motorral mozgatott tükre segítségével pedig a motor dőlését egyenlíti ki automatikusan. Ez az első sorozatgyártású intelligens fényszórórendszer motorkerékpárokhoz, mely a láthatóságot és a biztonságot egyaránt jelentősen növeli.

Az egy nyomon haladó járművek ívmenetben – a jármű dőlése miatt – éjszaka nagy problémával küzdenek. Mivel a főfényszóró merev kapcsolatban áll a motorral, a fényszórórendszer mindig azonos dőlésszögű, mint a motor. Ez ahhoz vezet, hogy a fényszóró ívmenetben az utat a motor előtt nem világítja be megfelelően.
Ennek megoldására az osztrák Zizala Lichtsysteme kifejlesztett egy olyan fényszórórendszert, mely a motor ívmeneti dőlését kiegyenlíti, és így a világos-sötét határvonal mindig ugyanabban a pozícióban marad. Emellett a rendszer kiegyenlíti a terhelés- és sebességváltozásokból, valamint útegyenetlenségekből fakadó bólintó mozgásokat is, és ezáltal a fénytávolság-változásokat. A 2011 tavasza óta kapható BMW K1600 GT / GTL páros ezzel a fényszórórendszerrel van felszerelve.
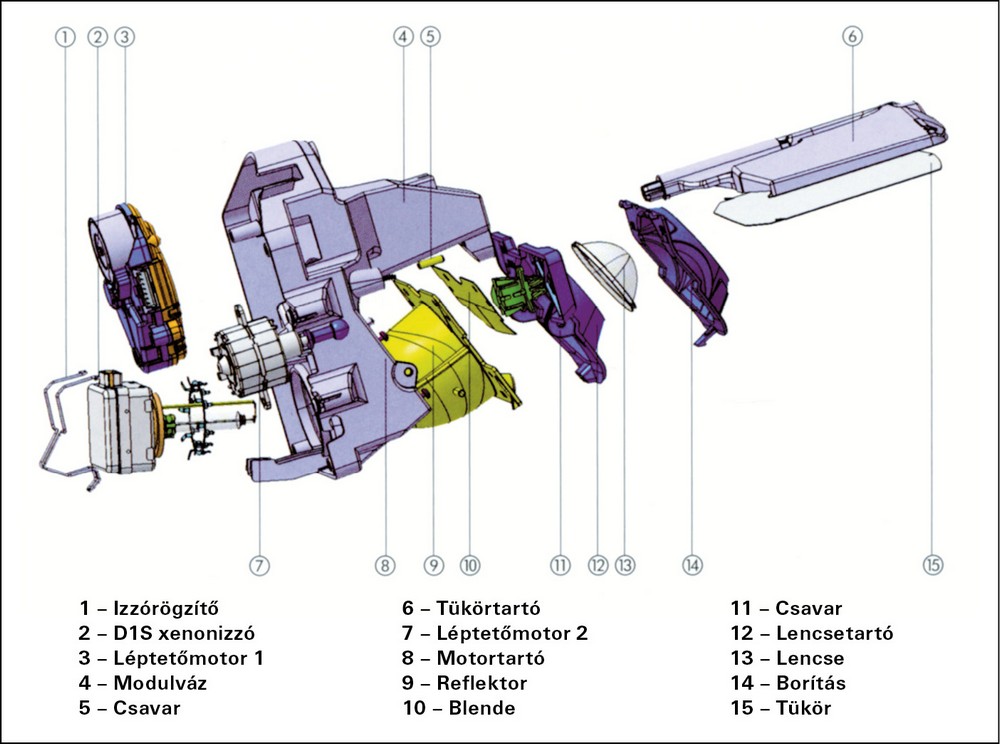
1. ábra
Rendszerleírás
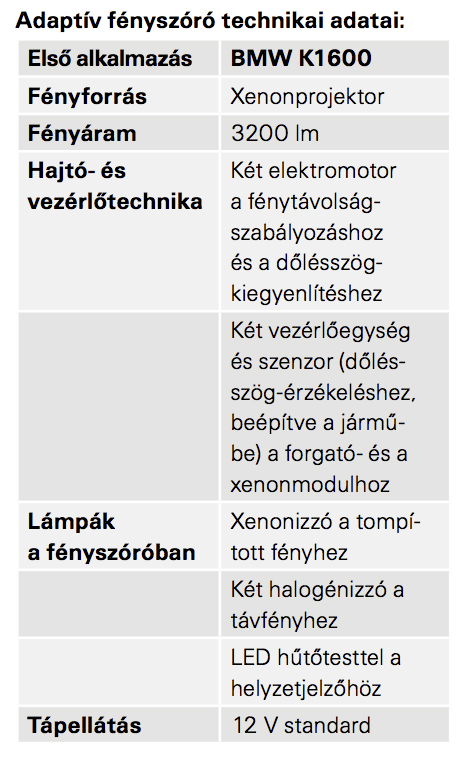
Az adaptív fényszóró alapját xenonprojektor szolgáltatja, melyben az izzó Philips D1S xenonizzó. A dőléskiegyenlítést motoros mozgatású tükör végzi. A tükör vékony tartón van, mely a modulvázon elfordítható. Ennek megfelelően a dőlésszög-korrekció 25o-ig lehetséges. A bólintáskiegyenlítést mozgatható lencse végzi. Az üvegből készült lencse a gyújtótéren átmenő tengely körül billen el úgy, hogy egy lineáris beavatkozó mozgatja a lencsetartót, miáltal a lencse hosszirányú mozgás hatására fel- és lefelé billen. A fényszórórendszer robbantott rajza az 1. ábrán látható, a táblázatban pedig a technikai adatokat foglaltuk össze.
Adaptív fényszóró technikai adatai:
A fénysugár irányítása
Egy hagyományos vetítőrendszerű fényszóróegység áll egy fényforrásból, egy reflektorból és egy elfordulóan ágyazott keretből, mely a különböző tompított fény funkciókat hozza létre (AHL-funkciók, Adaptive Head Light – adaptív fényszóró).
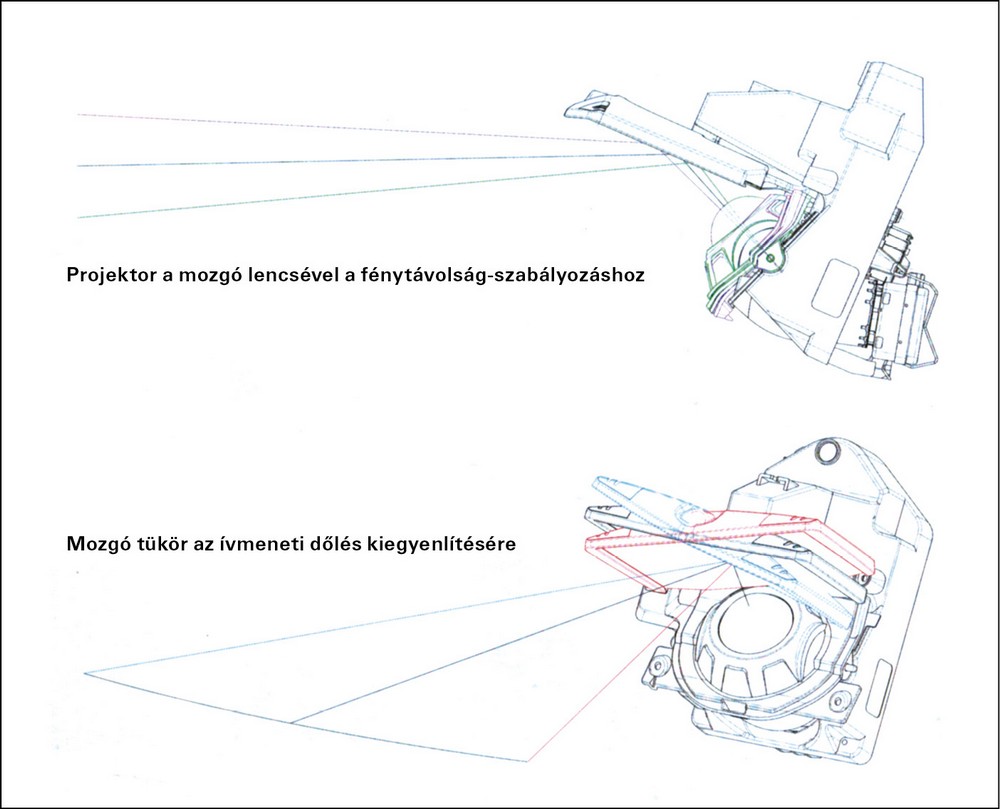
Ezen túlmenően – a motorhoz kifejlesztett fényszóróegységben – van egy mozgó tükör is. A projektormodul a fényt körülbelül 45o-ban felfele irányítja, majd a tükör tereli a fény irányát a kötelezően előírt 1%-os (0,57o) lejtéssel előre (2. ábra).
Egyenes menetben a fénymodul optikai tengelye és a tükör forgáspontja egy függőleges síkba esik, mely megegyezik a motorkerékpár hossztengelyével.
A világítás kifejezetten jónak mondható, ha a tükör tengelye feleakkora szögben áll, mint a vetítőlencse optikai tengelyének és a jármű hossztengelyének bezárt szöge, mely 45o. Ez a szögérték a legjobb szögérték, mert ebben az esetben optimális fényeloszlás biztosítható a legkisebb helyszükséglettel. A xenonizzó 10o-os szögben felfelé áll a reflektorban. Ezt az értéket helytakarékossági okokból választották, de így a fényt is jobban lehet a felette lévő tükörre irányítani.

2. ábra
Ahhoz, hogy kis tükröt használhassanak, a forgáspontot a tükröző felülethez a lehető legközelebb kellett elhelyezni. A lencse és a tükör közötti távolságnak a lehető legkisebbnek kell lennie, hogy a tükrön megjelenő vetített „képnagyságot” csökkentsék.
A projektornak is kompaktnak kell lennie, így csak kis fókusztávolságú lencsét lehet alkalmazni.
A fénymodul két optikai elemből áll, mely a képet invertálja. Emiatt a fénymodul-foglalatot fordítva kell beépíteni, és a xenonizzót is úgy kellett elhelyezni, hogy a xenonizzó külső vezető elektródája a fényív felett legyen. Ez a különleges kialakítás alig befolyásolja a fényáramot (kereken csak 100 lumennel kevesebb).
A fényszóró funkcionális áttekintése
3. ábra
Az első- és hátsókerék-felfüggesztés szenzorai szolgáltatnak adatot az állandó fénytávolság-szabályozáshoz. Egy léptetőmotor billenti a lencsét és korrigálja a bólintási szöget. Ennek a korrekciónak köszönhetően a fényszóró mindig pontosan az előre beállított területet világítja meg, amikor a motor egyenesen halad, a terhelés- és a sebességváltozásoknak így nincs befolyásuk.
A járműben lévő „giroszkóp” méri a lineáris gyorsulástényezőket és a természetes tengelyhez képesti elfordulás szögsebességeit. A vezérlés meghatározza ezáltal a motor dőlésszögét. A léptetőmotor elfordítja a tükröt és kiegyenlíti a dőlésszöget. Így mind a bólintási szöget, mind a dőlési szöget ki tudja egyenlíteni a rendszer, ezáltal ívmenetben lényegesen jobb a megvilágítás, mely következtében a biztonság is (3. ábra). Jobbkanyarban a szembejövőket például nem vakítja el.
A fénynyaláb korrekciója kanyarodáskor
A motor dőlésszögének megfelelően a tükör az ellenkező irányba fordul. A tükör elfordulási szöge 55% a dőlésszöghöz képest. Így lehetséges, hogy a világos-sötét határvonalat az adaptív fényszórórendszer mindig a megfelelő vízszintes pozícióban, párhuzamosan az úttal, függetlenül a motor üzemállapotától, tartsa.
A lencse és a tükör együttes mozgására folyamatosan változnak a tükröződési viszonyok. Minden dőlési és bólintási szög esetében megváltozik, hogy a tükör mely felülete világítódik meg. Emiatt figyelembe kell venni azt, hogy semmilyen mozgási korrekciót sem lehet független és lineáris függvényekkel véghezvinni.
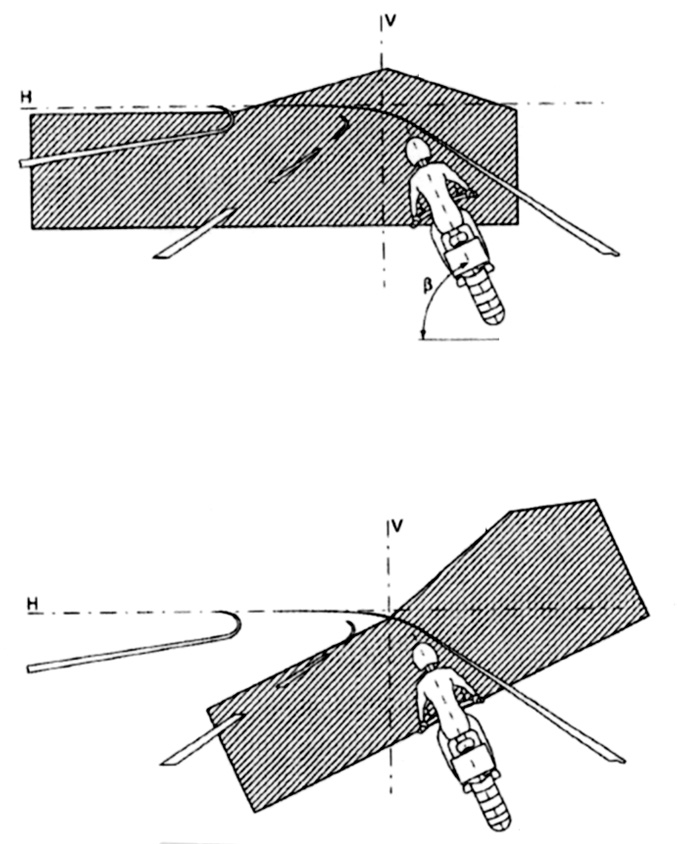
4. ábra
A motor bedöntött állapota szolgáltatja a „természetes” kanyarvilágítást, mely a fénycsóva optikai tengelyét jobbra vagy balra mozdítja el (4. ábra). Ez az oldalra mozdulás maximum 9o lehet 25o-os dőlés esetén.
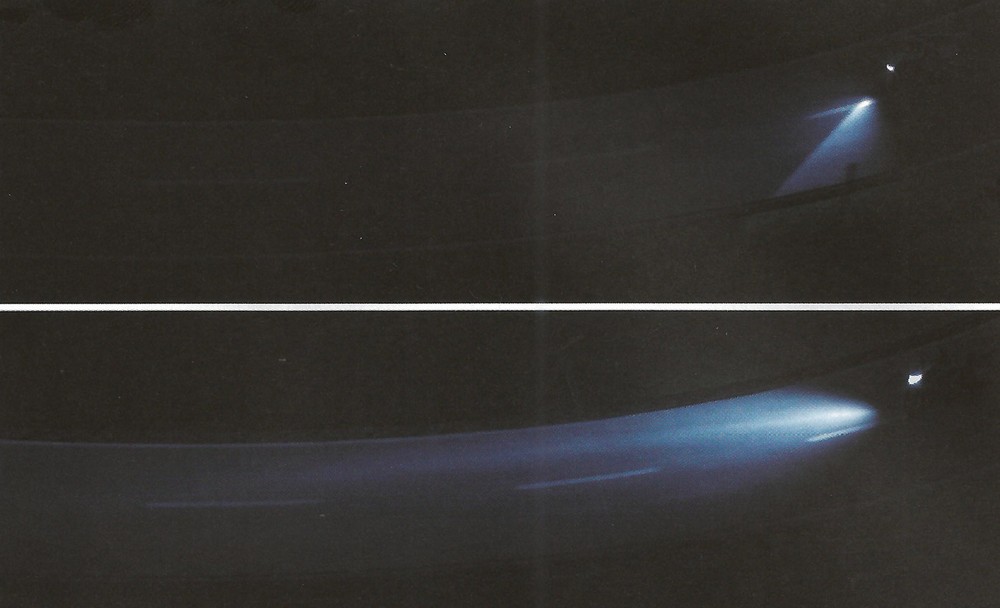
A sebességváltozások (gyorsítások és fékezések) a motor járulékos bólintásaihoz vezetnek, valamint a különböző terhelési állapotokat is ugyanúgy figyelembe kell venni. A lencse billentésével lehet a megfelelő világos-sötét határvonal vízszintes pozícióját állandó értéken tartani, ami az 5. ábrán is látható. A képsorozat járó motornál, tompított fény felkapcsolásakor készült, amikor is a fényszóró elvégezte az öntesztet. A képsorozaton az is jól látszódik, hogy a bekapcsolást követően a xenonizzónak időre van szüksége ahhoz, hogy a megfelelő színhőmérsékletet és fényerőt elérje.

5. ábra
Az elektromos rendszer
Több elektromos berendezés is segédkezik a fényszórórendszer működésében:
– egy szenzorcsoport,
– két szintjelző,
– egy elektronikus rendszervezérlő,
– egy elektronikus fényszóróvezérlő és két léptetőmotor.
A szenzorcsoport adataiból, mely három szögsebesség-érzékelőből és két gyorsulásérzékelőből áll, határozza meg a rendszervezérlő a motor dőlési és bólintási szögét. A két szintjelző, melyből az egyik az első kerékkel van kapcsolatban, a másik a hátsó kerékkel, szolgáltatja az adatot az átlagos berugózottsági állapot meghatározásához. Ezen értékek alapján mérik meg az aktuális bólintási szöget.
A szintjelzők értékei, a kiszámított dőlésszög és néhány egyéb érték, mint például a járműsebesség adata kerül a fényszóróegységbe, hogy a fényszóró a kívánt pozíciót meghatározza.
A xenon-gyújtóelektronika és a többi lámpa az autóipar standard komponensei. A helyzetjelzők LED-modulja egy hűtőtestből és egy meghajtóegységből, valamint egy LED-chipből áll. A meghajtóegység feszültségátalakítóként és védelemként szolgál, hogy ne legyen károsodás fordított polaritás és túlfeszültség esetén. A léptetőmotorok a kereskedelemben is elérhető motorok, melyek hagyományos AHL-komponensek.
Szarka János
Forrás: Hubert Schuhleitner, Erwin Mosch: Adaptiver Xenon-Hauptscheinwerfer für Motorräder, ATZ 10/2011.
http://www.zkw.at
Szarka János: A BMW K1600 GT/GTL motorkerékpár-páros soros hathengerű motorral, Autótechnika 2011 / 11-12