
LiDAR az önvezető autók lelke
Az önvezető autók, mint a közlekedés jövőjének egyik alternatívája már köztünk járnak. Mint a híradásokból tudjuk az USA egyes államaiban az önvezető autók már az utat koptatják, de kizárólag tesztelési célokkal és korlátozott területeken. Bár ma még nem lehet teljesen önvezető járművet vásárolni, a félig autonóm technológia már jó ideje elérhető a vásárlóközönségnek. A vezetési automatizálásnak több szintje van. A legegyszerűbbek az egyszerű vakfolt-érzékelő rendszerek, melyek radar segítségével érzékelik a mozgást a gépjármű mindkét oldalán, illetve mögötte; figyelmeztetik a vezetőt, hogy az egyes manőverek biztonságosan megkezdhetőek-e. A legfrissebb tanulmányok szerint a vakfolt-érzékelő rendszerek 14% -kal csökkentik az általános sávváltási baleseteket.

Egy valóban autonóm jármű létrehozásához félig autonóm rendszerek kapcsolatára lesz szükség. A LiDAR kulcsfontosságú eleme a biztonságos önvezető járművek életre hívásának, mivel a technológia lehetővé teszi a látást szemek nélkül.
Mi az a LiDAR?
A LiDAR (Light Detection and Ranging, nyers fordításban: fény alapú érzékelés és távolságmérés) a legújabb technológiának számít a navigációban. Ahogyan a technológia egyre kifinomultabbá válik, a LiDAR számos alkalmazási lehetőséget teremt meg. A LiDAR lehetővé teszi a jármű számára, hogy lássa, merre tart. A LiDAR rendszer úgy működik, hogy megméri a tárgyak távolságát az önvezető jármű helyzetéhez viszonyítva, így agyában létrejön a környezet 3D-s mása. Az integrált számítógépes rendszer a kezdeti lézerimpulzusok és a vevő közötti időt méri a fénysebesség segítségével a megtett távolság kiszámításához. A LiDAR másodpercenként 100 000 lézerimpulzus adatait bocsátja ki és számítja ki. Ezeket az adatpontokat felhasználva pontfelhőt képez és 3D objektummodelleket hoz létre. Miután azonosítja az obejktumokat (azaz legtöbbször járműveket, gyalogosokat, netán az utat szegélyező tereptárgyakat), és megjósolja várható viselkedésüket a jármű reakciójának meghatározásához.
A legtöbb LiDAR rendszer négy összetevőből áll:
Lézerfény kivetítés: A LiDAR rendszer lézerimpulzusokat bocsát ki, melyek az útjukba eső tárgyakról visszaverődnek. A visszavert hullámokat a LiDAR rendszer szenzorai érzékelik, vezérlőegysége értékeli, térképen (3D nézetben) megjeleníti, illetve kiinduló adatként használja fel elsődlegesen manőverek algoritmusainak megalkotásakor.
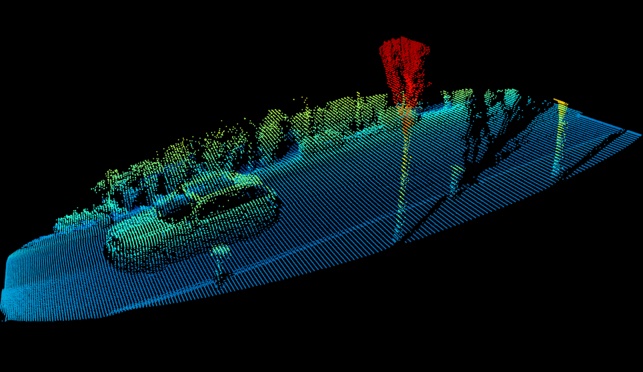
Szkenner: a beérkezett lézerpontokat egy „pontfelhőbe” csoportosítja, hogy elkészítse a környezetében lévő tárgyak 3D-s modelljét.
Globális helymeghatározó rendszer (GPS): rögzíti a beolvasott 3D objektumok pontos helykoordinátáit egy LiDAR érzékelő helyzetéhez viszonyítva.
A LiDAR technológia jelentősége az önvezető járművekben:
A LiDAR technológia lehetővé teszi az önvezető járművek felelős vezérlőegységei számára, hogy pontos menetdinamikai szabályzást valósítsanak meg annak képességével, hogy észlelik a jármű közvetlen környezetében lévő tárgyakat. Úgy gondolhatunk rá, mint egy jármű „szemére”, ami az önvezető járművek megvalósulásának legfontosabb feltétele. A LiDAR olyan dolgokat láthatnak, amelyek meghaladják az emberi szem képességeit. Képzelje el, ha látása folyamatos 360 fokos láthatóságot biztosítana, vagy ha a mélységérzékelése mindig helyes lenne, és soha nem kellene becsülnie az autója és az Ön előtt álló autók közötti megállási távolságot. A LiDAR mindezt lehetővé teszi.
A LiDAR bevezetése az önvezető járművek fejlesztésébe elengedhetetlen a koncepció életre keltéséhez. Mivel a biztonság a legfontosabb kérdés, a LiDAR lehetővé teszi az önvezető járművek számára, hogy emberi tévedés nélkül pontos döntéseket hozzanak, így kevésbé lesznek hajlamosak az ütközésekre.
(Küllei)


