
Gyalogosok biztonságát növelő gépjárműtechnika
Bevezetés
Az Európai Bizottság (European Commission – EC) már a 2001-ben folyó és a közlekedés biztonságával foglalkozó tanulmányában rámutatott azokra a területekre, amelyeknél fejlesztésre van szükség a könnyen sebezhető közlekedési szereplők védelme érdekében, elsősorban városi közlekedésben. Könnyen Sebezhető Közlekedési Szereplők (VRU – Vulnerable Road Users) a gyalogosok és a kerékpárosok. 2001 márciusában indították el az EUFP5 jelű, az ún. SAVE-U (Sensors and system Architecture for Vulnerable Road Users – Érzékelők és Szerkezeti Rendszerek a Sebezhető Úthasználók védelmére) projektet, amely 2005. szeptember 30-án fejeződött be hivatalosan. Az EC azt a célt fogalmazta meg követelményként az autóipar számára, hogy növelje a gyalogosok biztonságát, és jelentősen csökkentse 2010-ig a halálos közúti balesetek számát, egészen pontosan 50%-kal a 2001-es mutatókhoz képest. Erre azért volt szükség, mert a megfigyelések a következő eredményekre vezettek:
– Világviszonylatban a gyalogosok okozzák – a járművezetők után – a legnagyobb számú forgalmi balesetet.
– A gyalogos balesetek többsége 50 km/h alatt történik. – A gyalogos balesetek többsége nappali időszakban történik, ugyanakkor a halálos gyalogos (és kerékpáros) balesetek száma éjjel is nagyobb.
– Az útkereszteződésekben a balesetek aránya függ a kereszteződések jellegétől és geometriai méreteitől.
– A gyalogos (és kerékpáros) balesetek nagy többségében egy jármű hozzávetőlegesen egyenesen halad (nincs kereszteződés vagy kanyar).
– A balesetek nagy számában a gyalogosok (és kerékpárosok) oldalt keresztezik a jármű útvonalát.
– A fiatalok fokozottabb számú balesetet mutatnak, mint az idősek.
1. ábra
A vizsgálatok és fejlesztések két irányban indultak meg:
a) A változat: 3 szenzort, egy infra-, egy színes videokamerát és egy 24 GHz-es radarhálózatot tartalmaz. Ez a leginkább támogatott rendszer.
b) B változat: ennél a módszernél a gyalogosok detektálása a PROTECTOR elnevezésű projekt keretében történik. Fekete-fehér sztereó kamerával működik az érzékelő rendszer, vagyis a detektálás teljesen vizuális alapú.
2. ábra
A VRU detektálása kiterjed különböző alakokra, magasságra, ruházatra, járási formára stb. A követelmények nagyon szigorúak és kiterjednek a valós idejű feldolgozásra, pontos érzékelésre, kis hibaszámra stb. A gyalogosokat érzékelő algoritmus azon alapul, hogy az infra- és a színes kamera (A változat) által érzékelt képet össze kell hasonlítani egy előre megadott (memória) képmodellel. A SAVE-U tehát tartalmaz egy EIP-t (Embedded Jauge Processor
– Elemi Beágyazott Képalkotó Processzor is. Az észlelő egység által a VRU-nak meghatározott objektum adatai továbbításra kerülnek az osztályozó egységbe, amely adott valószínűséggel eldönti, hogy valóban VRU-ról van-e szó, vagy pedig nem.
Megjegyzés: a SAVE-U projekt egyik fontos eredménye, hogy a VRU képeinek hatalmas adatbázisa van. Több mint 14 000 képet és 180 képsorozatot dolgoz fel, amelyet infra és színes videokamerával készítettek. A vizsgálatok azt igazolták, hogy a legjobb eredményt neurális hálózatokat tartalmazó rendszerek mutatták. Megjegyzés: a neurális hálózat olyan információfeldolgozó eszköz, amelyek párhuzamos, elosztott működésre képesek, lokális feldolgozást végző neuronokból (az agy fő feldolgozó egységei után adott elnevezés) állnak, képesek tanulni és a megtanult információt felhasználni. Megvalósításuk szerint lehetnek hardver, szoftver vagy akár a kettő kombinációja is. A neurális hálózatok általában nagyon jól használhatók osztályozási, optimalizálási és approximációs feladatok megoldására. A SAVE-U változatai esetén ezért lehetett ezt a területet felhasználni.
3. ábra
A SAVE-U
Mint korábban említettük, két változatot – A és B – dolgoztak ki. A következőkben ezek felépítését tárgyaljuk.
A változat
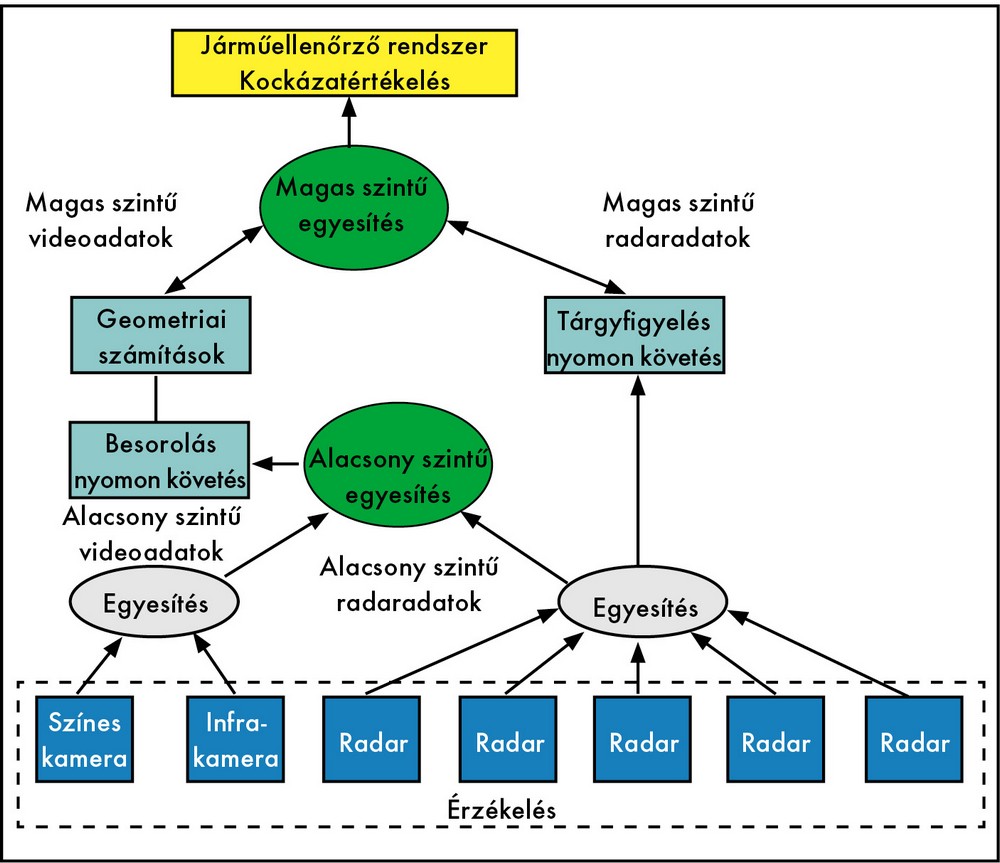
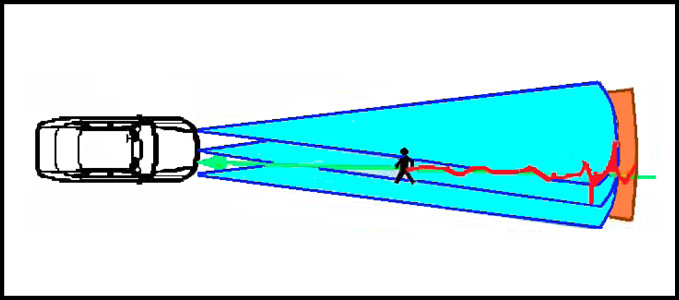
Az A változatot a Volkswagen és a DaimlerChrysler készítették és fejlesztették, illetve fejlesztik. A rendszer felépítése az 1. sz. ábrán látható. Ennél a konfigurációnál a rendelkezésre álló érzékelési platform egy videorendszerből, egy radarrendszerből és egy ECU- (Electronic Control Unit – Elektronikus Vezérlő Egység) rendszerből áll. Az ECU adatokat gyűjt a képekről és a radarfolyamatokról. Kiszámítja az aktuális adatokat, osztályozza a VRU-kat, kiszámítja a távolságukat, a beavatkozáshoz szükséges időt, relatív sebességet stb. Fogadja a jármű információit: sebességet, gyorsulást, kitérés szögét, dőlési szöget stb. A videorendszer infravörös és színes kamerát, a radarrendszer pedig öt radarból álló hálózatot tartalmaz. A rendszer megállapítja, hogy „Van-e VRU a kocsi előtt?” és „Mik a VRU jellemzői?”. Ennek alapján dönt a védelmi rendszer a beavatkozásról. A belső kommunikáció CAN- (Communication network) buszon keresztül zajlik. Amennyiben van pl. a radar iránykarakterisztikában egy gyalogos (2. sz. ábra), akkor a jármű automatikusan fékez. A fékezési stratégia a következő. Egy veszélyes forgalmi helyzet esetén a féket korán (kb. 1 sec) aktiválja a rendszer. Ez azért szükséges, hogy legyen elég idő a sebességcsökkentésre. A teljes féknyomás csak akkor alkalmazható, ha a gyalogos és a jármű ütközése elkerülhetetlen. A kísérletek és a számítások kimutatták, hogy az elkerülhetetlen katasztrófát meg lehet jósolni kb. 300 méterrel az ütközés előtt.
B változat
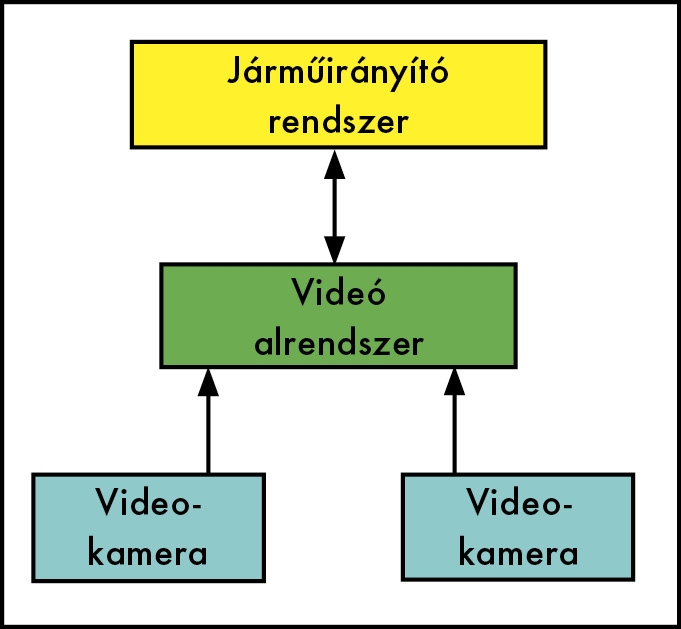
Ezt a változatot a DaimlerChrysler egyedül indította a SAVE-U projekten belül, PROTECTOR néven. Ez csak videokamerákat alkalmaz. A rendszer felépítése a 3. sz. ábrán látható. Megjegyzés: mindkét rendszer esetében a Volkswagen Baleset Kutatási Osztál - lyal – Volkswagen Accident Research Department – egyetértésben döntötte el, hogy csak az automata fékezés lenne az egyetlen VRU védelmi rendszer. Itt figyelembe vették, hogy a frontális ütközés jellemzően elkerülhetetlenné válik kb. 300 msec-al az ütközés előtt. A legbonyolultabb feladat a megfelelő küszöbérték megvalósítása, amely azt mutatja meg, hogy az e feletti érték esetén van VRU, az alatta lévő érték esetén pedig nincs, függetlenül attól, hogy valóban van vagy nincs cél.
Belső kommunikáció
A kommunikáció hálózati eszközökkel történik, 3 db miniszámítógép felhasználásával. Ebben a pontban a gyakran alkalmazott A változatot tárgyaljuk. A rendszer egyik számítógépe a radar adatait, a másik a kamerák adatait, a harmadik pedig a jármű adatait dolgozza fel. A projekt kezdetén még követelményként szerepelt a járművezető figyelmeztetése hangjelzéssel, ezzel lehetővé téve az emberi beavatkozást. A megvalósítás során ez utóbbi már nem szerepelt a tervekben, csak a hangjelzés. Az emberi beavatkozási lehetőség helyett a beavatás automatikus. A védelmi intézkedések kiviteli stratégiája három fázist tartalmaz:
– Első fázis
Az érzékelő platform észleli és nyomon követi az összes VRU-t a jármű előtt, de semmiféle intézkedést nem foganatosít.
– Második fázis
Amennyiben a VRU-k beléptek a jármű útvonalába, de valószínűtlen az azonnali ütközés, akkor a járművezetőt hangjelzéssel készíti fel a rendszer az esetleges veszélyre.
– Harmadik fázis
Nagy valószínűséggel bekövetkező baleset esetén a jármű automatikusan lefékez. A leírtakat a 4. sz. ábra mutatja.
4. ábra
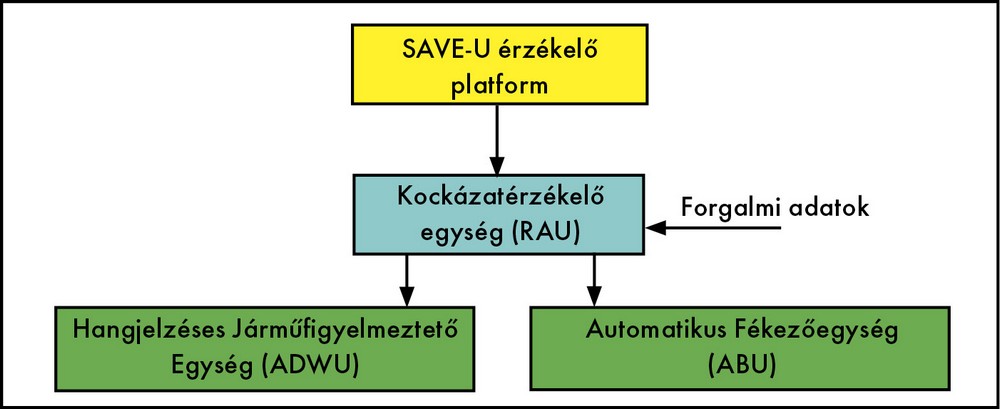
Az ábra áttekintést ad a leírt folyamatról. A hangjelzés útján történő figyelmeztetés és az automatikus fékezés aktiválása egy kockázatértékelő egység utasításával történik. Az utasítás bekövetkezése viszont a VRUazonosításokon – ami a SAVE-U-tól származik – és a jármű adatállományán alapul. A karambol aktualitása függ a VRU-k jövőbeni viselkedésétől és a járművezetőtől, de mindkettő kiszámíthatatlan. A gyalogosok megállhatnak, elindulhatnak, irányt változtathatnak. Mindezeket a bizonytalanságokat még fokozza, hogy a VRU-k sebességének becslése a járművek érzékelő platformjával nagyon bonyolultnak és gyakran pontatlannak bizonyult. A leírtak alapján arra a következtetésre jutottak, hogy a döntés, a védelmi rendszerek aktiválása kizárólag a VRU-k helyzetétől és irányváltoztatásától függ, illetve még a forgalomban szereplő pálya tulajdonságaitól. Ez indokolta, hogy az érzékelési területet három zónára osszák fel (5. ábra).
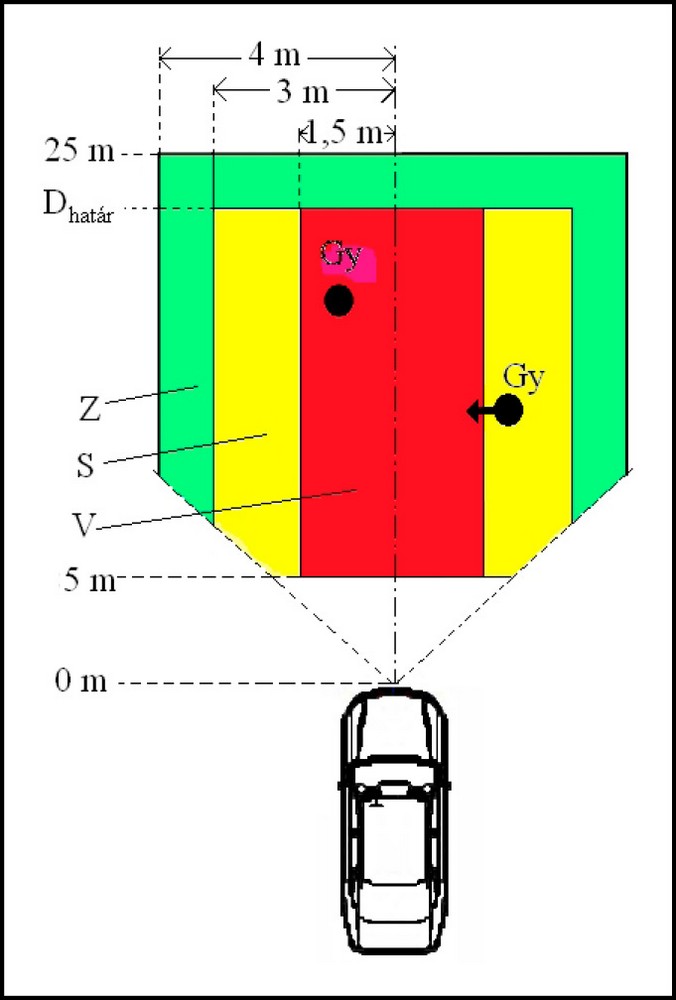
5. ábra
a) Vörös zóna (V) A jármű tengelyétől 1,5 m távolságig tart mindkét irányban. Az ütközési kockázat a VRU-kal ezen belül van figyelembe véve. b) Sárga zóna (S) A VRU-k a sárga zónában 1,5–3 m-ig vannak figyelembe véve mindkét irányban, de csak akkor, ha a menetirányban lévő oldalon haladnak. c) Zöld zóna (Z) A VRU-k a védelmi intézkedések aktiválása vonatkozásában nincsenek figyelembe véve. A távolság határa (D) 25 m-re van téve a sofőr figyelmeztetése miatt, és dinamikusan illeszkedik (alkalmazkodik) a jármű sebességéhez. Az automatikus fékezés tartománya 5–20 méterig terjed. Kísérlet során a hangjelzés olyan volt, hogy a riasztóberendezés jelzése kódolva volt aszerint, hogy a jobb vagy a bal oldalon szóljon annak megfelelően, hogy a veszély melyik oldalon lépett fel. A hangerő pedig kódolta a veszély nagyságát jelezte. Ez bevált és valószínű a végleges kiépítésben is ez fog szerepelni.
A VRU-k jellegzetességei
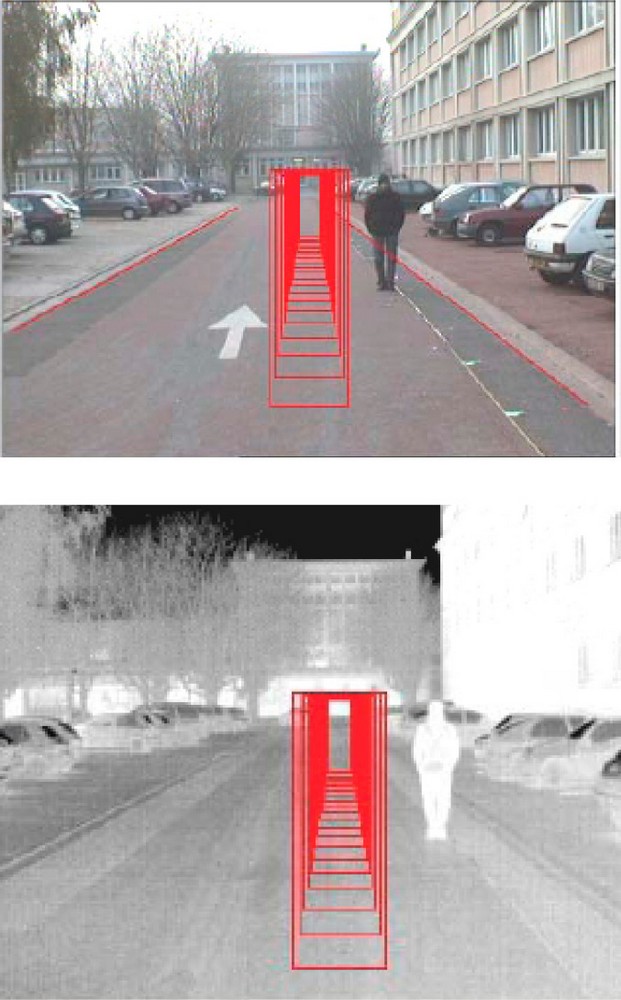
Az érzékelő algoritmus működése a VRU-k és a tárolt modellek összehasonlításán alapul. A valós kép meghatározásánál több változó van (szín, fényesség stb.), ezért a kép éleire történő tájékozódás az egyetlen információ, amit a VRU megjelenésével modelleztek, így az egy VRU jellegzetes vektorként fogható fel. Ezt a vektort hasonlítják össze az adatbázis figuráival. A VRU-k jellegzetes kiterjedésének meghatározása az alak téglalapba foglalásának alapján történik, amelyeket az egymástól eltérő VRU-jármű távolságból számítanak, 7–30 m távolságban a videokamerától. A kísérletek azt igazolták, hogy 10 ilyen folyamat megismétlése elegendő a helyes alakfelismeréshez (6. ábra). [13]
Lehetséges VRU baleseti formák
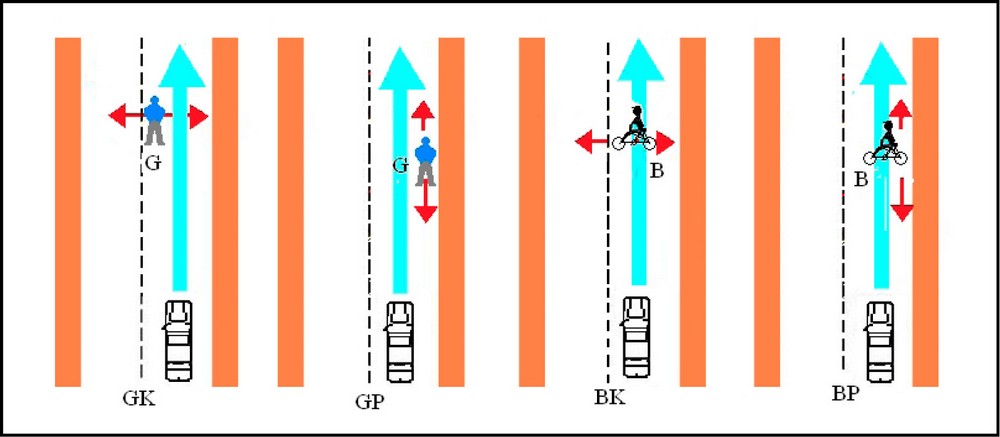
A VRU-baleseteknek sok különböző formája lehet, de a vizsgálatok igazolták, hogy négy alapvető mód tárgyalása elegendő (7. sz. ábra). [13] Az összes eset mind egyenes, mind kanyarodó utat tartalmaz – bár ez utóbbi nincs külön jelölve. Az ábrák vonatkoznak kereszteződésekre is, de ezek sincsenek jelölve. Ennek megfelelően a jelölés legyen XY. Az X felveheti a gyalogos (G) vagy kerékpáros (B) jelölést, az Y pedig a keresztirányú (K), illetve párhuzamos irányú (P) jelölést. Magyarázatként tekintsük a GK esetet.
6. ábra
Ekkor a gyalogos átkelhet egy kereszteződésben a gyalogosátkelő helyen szabályosan, vagy az úttest bármely részén szabálytalanul. Ezek az esetek pl. az algoritmus számára közömbösek. A SAVE-U-ban nincs olyan megkülönböztetés, amely az időjárásra és napszakra vonatkozik. A fejlesztett eszközök egyaránt képesek kezelni a jó és rossz (eső, hó, köd, jég, száraz idő stb.) időjárási körülményeket, továbbá a különböző napszakokat (dél, hajnal és esti szürkület, éjszaka stb.). Felmerült a gyalogos (kerékpáros) figyelmeztetése is a veszélyre, pl. fényszóró felvillantásával vagy a duda használatával. Ez azonban bizonyos országokban jelenleg jogi problémákba ütközik, mert pl. ez Németországban tilos.
7. ábra
Gyalogos- (kerékpáros) felismerés éjszakai látásviszonyok mellett
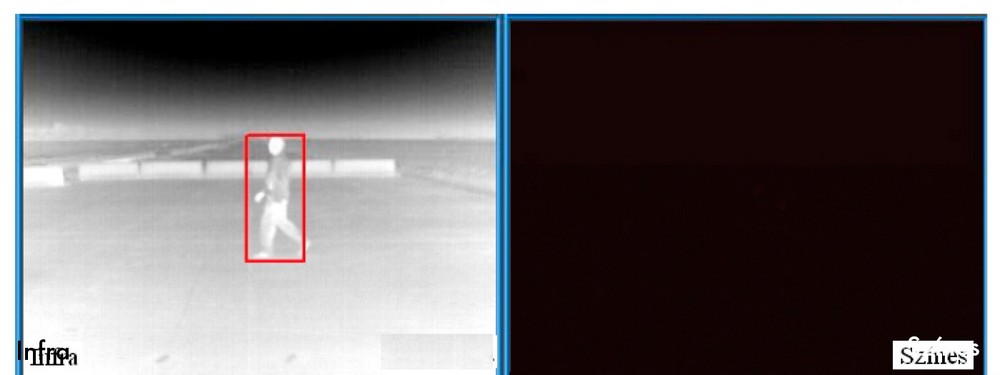
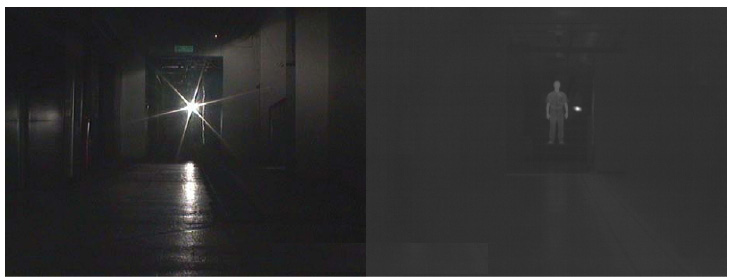
Éjszakai közlekedési viszonyok mellett csak az infra- (IR) kép és a radarok jelei szolgálhatnak értékelhető információval. A színes kamera jelei használhatatlanok (8. sz. ábra). Ebben az esetben tehát mindenképpen az A változat jöhet szóba. A 8. a sz. ábrán az IR-kamera képe látható, a 8. b sz. ábrán pedig a színes kamera képe, amely ekkor teljesen sötét.
8. ábra
A 9. sz. ábrán [13] olyan eset látható, ahol a szembejövő jármű világítása elvakítja a színes kamerát, míg az IR továbbra is jól használható (9. a sz. ábra). A projekt kezdeti időszakához viszonyított minőség a fejlesztések során napjainkra jelentősen fejlődött, de még mindig vannak korlátai, amelyek a következők: a) A gyalogosfelismerés még mindig bizonytalan a valós esetekhez képest. A gyakorlatban elért legjobb felismerés városi környezetben 80…90%-os volt. Ez még mindig magas bizonytalanságot jelent. b) Az érzékelés hatására bekövetkező vezérlés még eléggé átfogó jellegű. Pl. növelni kell a VRU-k lefedettség-hatósugarát, vagy az algoritmus működési sebességét gyorsítani kellene és 40 km/h helyett 50 km/h városi forgalomhoz kell igazítani. c) A hardver és a szoftver összehangolása még nem kielégítő. A VRU-algoritmust jobban hozzá kell igazítani a ma már jól alkalmazható speciális hardverekhez.
9. ábra
II. Sávkövető és figyelmeztető rendszerek
Bevezetés
A világon évente több millió olyan típusú baleset következik be, amelyik sávelhagyásból adódik úgy, hogy közben nem történik más járművel ütközés. Csak az Amerikai Egyesült Államokban évente kb. hárommillió sávelhagyásos baleset történik, amelynek kb. 13 000 halálos áldozata van. Az előzetes felmérések alapján ezeknek a baleseteknek a fele elkerülhető lett volna, ha a jármű rendelkezik sávelhagyás-figyelmeztető rendszerrel. A sávkövető rendszerek legfontosabb komponense a járműre szerelt kamerák által rögzített képek feldolgozása és kiértékelése. Ezek a képsorok a jármű környezetéről szolgálnak hasznos információkat, amelyek kiértékelés után komoly segítséget nyújtanak az adott közlekedési helyzetben. A modern járművekben a vezetés lényeges paraméterei, mint pl. a pillanatnyi sebesség, ill. az index és a fék működési állapota kön - nyen elérhetővé tehetők a segédrendszerek számára. A vizsgálatok igazolták, hogy a videó alapú sávfigyelő rendszerek kellő információt nyújtanak a sáv geometriájáról is.
A vizsgálatok során különbséget kell tenni a sáv érzékelése és a sáv térképezése között. A sáv érzékelése a sáv szélei helyeinek egy sima képen való meghatározását jelenti anélkül, hogy előzetes tudomással rendelkeznénk a sáv helyzetéről. A sávtérképezés a sáv széleinek folyamatos sorozatképek alapján történő meghatározását jelenti, miközben információt használunk fel a sáv helyzetéről a megelőző sorozatképek felhasználásával, hogy leszűkítsük a sáv lehetséges helyzetét az aktuális képen. Különböző rendszerek különböző algoritmusokat használnak a sáv helyzetének érzékelésére és térképezésére (pl. VaMoRs- és LOIS-rendszerek), bár lehetnek átfedések is pl. abban, hogy ugyanazt az alapképet dolgozzák fel a sáv érzékelésére és térképezésére. Általában a pályaelhagyások fő oka a figyelmetlenség és a kimerültség. Hogy adott esetben melyik érvényesül, arra a vezető aktivitásából lehet következtetni. Erre elviekben két lehetőség van: mérhetjük magának a sávtartási feladat teljesülésének mértékét, vagy mérhetjük a változók értékét, amelyek a vezető közvetlen befolyása alatt állnak (pl. kormányzási szög). A sávkövetési feladat teljesülésének egyik legjellemzőbb mutatója a sávelhagyási idő (TLC – time to line crossing), amely megadja, hogy állandó járműsebességet feltételezve mennyi idő múlva hagyná el a sávot a jármű kereke.
A vezetői aktivitás mérhető tényezői a kormányzási, illetve a fék-, gázpedál-használati értékek, továbbá az irányjelző használata alkalmasak a vezető fáradtságának jelzésére. Fairchlugh három különböző fáradtsági mutatót hasonlított össze: pszichofiziológiai méréseket (EEG), az elsősorban a vezető által befolyásolt mutatókat (sebesség, kormányzási szög), valamint a vezető szubjektív megítélését a saját fáradtságáról. Siegmund és társai egyértelmű összefüggést találtak a három mutató között. Ezek alapján a kormánymozgatási (in) aktivitást javasolták a fáradtság potenciális mutatójának. Richardson és társai viszont a hosszú ideig tartó vezetés okozta fáradtság vezetési teljesítményre gyakorolt hatásáról készített tanulmányt. A kimerültség mértékét EEG-mérésekkel vizsgálták.
Videó alapú sávkövető rendszer kombinált algoritmusa
Ebben a részben olyan sávkövető rendszert, illetve algoritmusát tárgyalunk, amely a különböző sávelhagyást érzékelő algoritmusok számításait használja az irányjelző és fék állapotának, illetve kormányzási tevékenység figyelésével. Első lépésben egyértelműen meg kell határozni, hogy mely esetekben szükséges a vészjelzés alkalmazása. Jelen helyzetben kilenc alapvető esetet különböztetünk meg. Mindenekelőtt meg kell említeni, hogy három különböző vonalvezetésű sávot definiálhatunk: egyenes, balra kanyarodó és jobbra kanyarodó típusokat. Mindhárom típuson belül is a következő eseteket kell figyelembe venni. Sávban maradó, sáv elhagyása balra és sáv elhagyása jobbra. Könnyen belátható, hogy amennyiben sávon belül maradunk, nem szükséges vészjelzés alkalmazása, függetlenül attól, milyen vonalvezetésű sávban közlekedünk. Abban az esetben viszont, ha elhagyjuk a sávot, csak akkor alkalmazható figyelmeztetés, ha a sávelhagyás akaratlanul történt.
10. ábra
Ezért fontos a vezető folyamatos figyelése. Ez azért szükséges, hogy elkerüljük a téves riasztásokat. A szándékos sávelhagyásnak a következő esetek tekinthetők: – sávváltás esete – kanyar ívének levágása – kitérő manőver vészhelyzet esetén. Ha ezekben az esetekben, azok bármelyikében riasztás jön létre, az téves riasztásnak minősül, amely nem megengedhető. Ugyanakkor a vezetői viselkedés megfigyelésének tényezői: – irányjelző állapota – fékezés – kormányzási szög. Ezek az állapotjelzések könnyen elérhetők a jármű elektromos hálózatából. A sávelhagyás érzékelésének alapja a jármű sávon belüli aktuális pozíciójának (CCP – car’s current position) folyamatos figyelése. A pozíció közelítő értékét sávfigyelő algoritmus segítségével határozzuk meg. A jármű akkor követi a sávot, ha első kerekei közül mindkettő a sávon belül tartózkodik. Ekkor az első kerekek sávhatárhoz viszonyított helyzete: ∆ y > 0 értékek adódnak. Ekkor nem szükséges riasztás. Amint a kerekek valamelyike átlépi a sávhatárt, akkor ez evidens módon azt jelenti, hogy a jármű elhagyta a sávot. Ekkor ∆ y < 0 értékek adódnak. Ebben az esetben szükséges a riasztás. Sajnos azonban ekkor lehet, hogy a riasztás elkésett, mert hiszen a kerekek már sávon kívül vannak. Ez a probléma úgy védhető ki, ha a számításokhoz hozzárendelünk egy virtuális sávszélességet, amit a mért értéknél kisebbre választunk, így a vezetőt korábban tudja a rendszer riasztani. Ekkor viszont ez a módszer nem lesz elfogadható azon vezetők számára, akik a teljes sávot használják vezetés közben.
TLC alapú algoritmus
A sávelhagyás időbeni észlelését legjobban a TLC alapú szemlélet biztosítja. Ezzel kiszámítható, hogy a jármű mikor hagyja el a sávot.
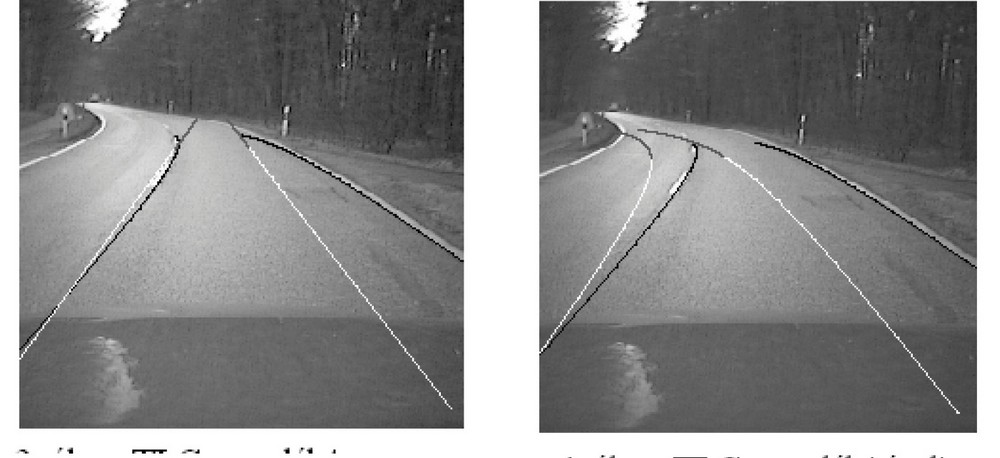
Modell a jármű változatlan – egyenes vonalú – mozgásának – továbbhaladásának feltételezésével
E feltételezés szerinti mozgása a 10. sz. ábrán látható. Ekkor azt feltételezzük, hogy a jármű egyenes vonalon halad tovább.
Modell, ha a TLC-t ívelt görbével közelítjük meg
Feltételezésünk a 11. sz. ábrán látható. Az autó mozgásának ívét az íves sávhatárok becsléséhez hasonlóan klotoid modell segítségével határozzuk meg. Megjegyzés: klotoid: egyenesekből és körívekből álló, célszerűen megválasztott szakaszok. Mindkét esetben az autó közepének mozgását vesszük figyelembe. A kerekek pozíciójának számításához a jármű szélességét is figyelembe kell venni.
A jármű viselkedésének megfigyelése
A sávelhagyás lehet akaratlan és szándékos. Nyilvánvaló, hogy az irányjelző használata sávváltási szándékra utal. A vezető egy másik megfigyelendő tevékenysége a kormányzás, amelynek ellenőrzése a kormányzási szög megfigyelésén alapul. A mérés során két küszöbérték definiálható. Egy alsó és egy felső határ. Az alsó határ alatti értékek hosszú egyenes utakon történő vezetések során tapasztalhatók, így feltételezhető, hogy a vezető koncentrációképessége csökken. Ilyen esetekben hamarabb történik a riasztás a virtuális sávszélesség használata mellett. A felső határ feletti értékeknél jogos az a feltételezés, hogy a vezető éber. Ilyenkor a riasztás le van tiltva. A rendszert úgy kell kialakítani, hogy a riasztás ne következzen be szándékos sávelhagyáskor. Szándékos sávelhagyásnak minősülnek az alábbiak: – az irányjelző használatát követő sávváltások – heves kormánymozdulatokkal és fékezésekkel járó kitérő manőverek – a sáv elhagyása rövid időre a kanyar ívének levágása érdekében. A sávelhagyás akkor tekinthető kanyarlevágásnak, ha a jármű becsült útvonala még az utat pásztázó rendszer látókörén belül visszatér a megfelelő forgalmi sávba. Ekkor a téves riasztás elkerülése a TLC szemléletű sávelhagyás-észlelés alkalmazásával lehetővé válik


