Diagnosztika CAN-buszon
A ’70-es évektől kezdődően az elektronika fokozatosan átvette a gépjárműegységek vezérlését, majd irányítását. A kezdeti analóg, majd hibrid vezérlőket kiváltották a tisztán digitális, mikroprocesszoros rendszerek, melyek már a működési hibák tárolására alkalmas memóriát is tartalmaztak. A hibatárak kiolvasásakor kapott adatok nagymértékben segítették a szervizmunkát, elsősorban az elektronikus rendszerek működését kevésbé ismerő szakemberek számára. Az elektronika folyamatos térnyerésével és felügyeleti területének kiterjedésével párhuzamosan, egyre többrétűbb és részletesebb adathozzáférésre és hibatárolásra volt szükség, sőt a környezetvédelmi előírások szigorításakor az összes környezetszennyezést okozó hiba eltárolása (OBD II; EOBD) kötelezővé vált.
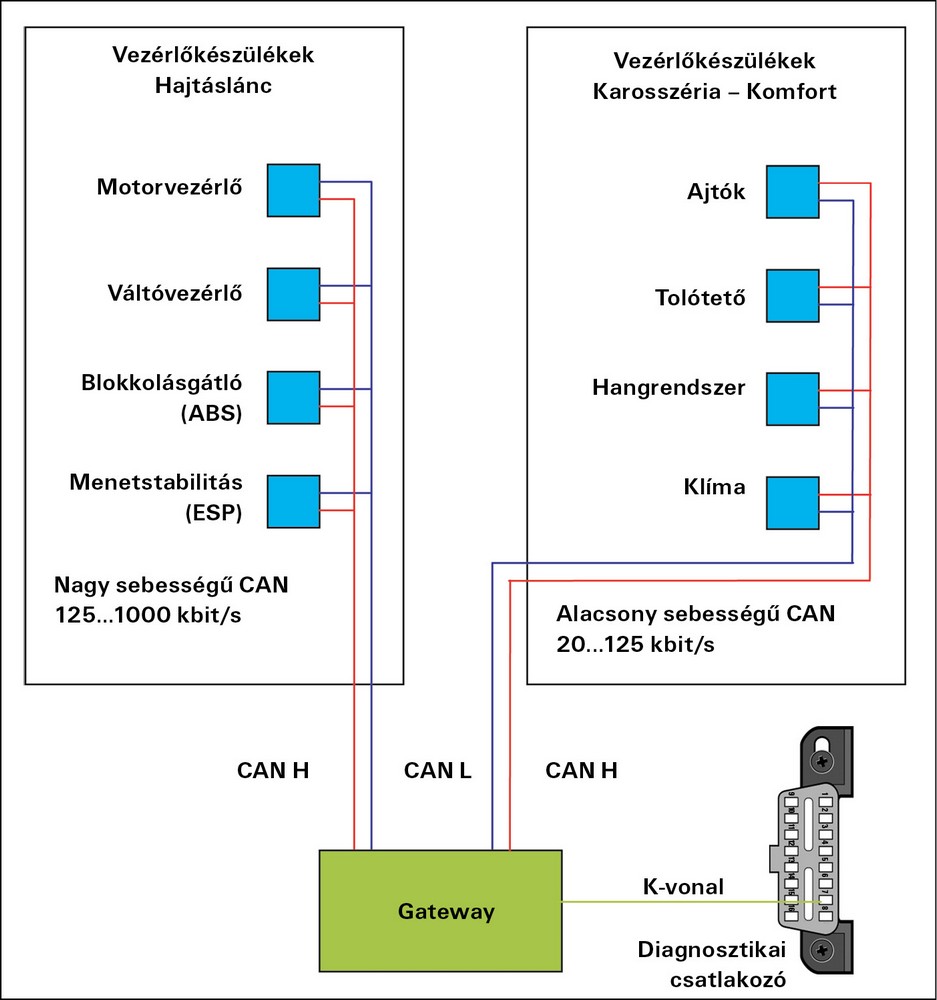
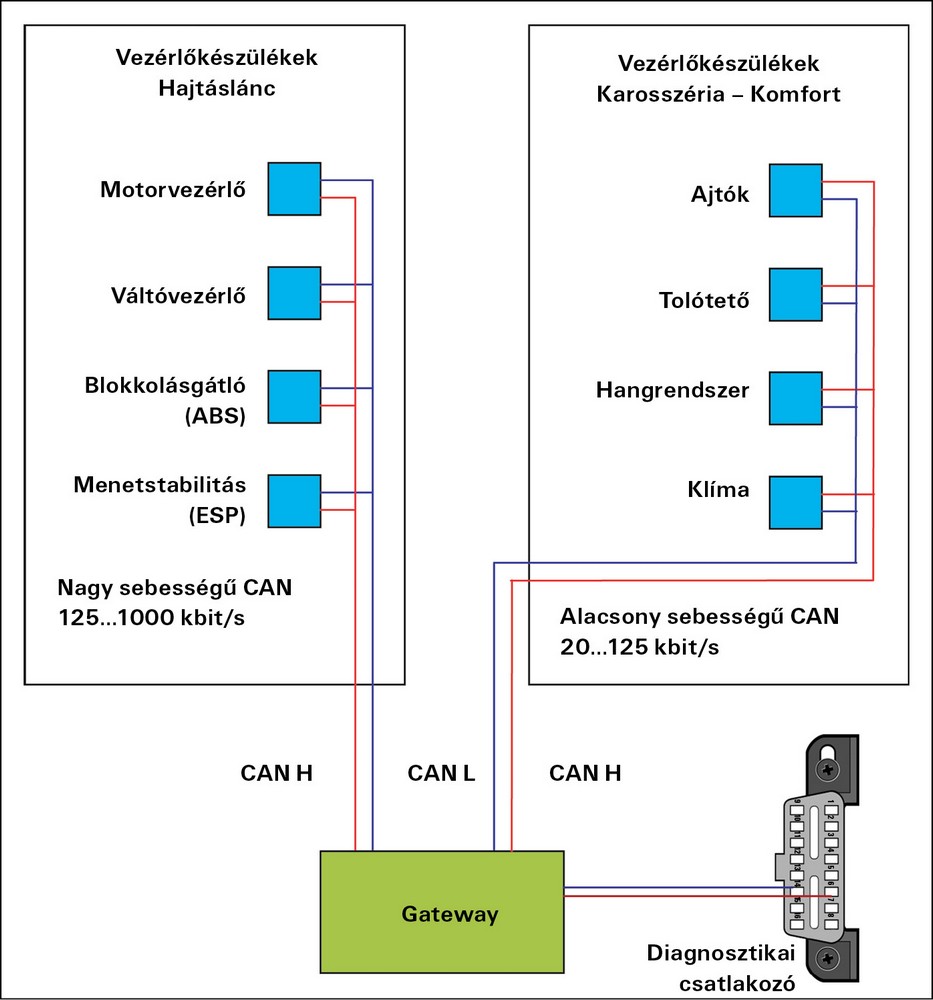
1. ábra
Az egyes vezérlőkészülékek meghatározott adataihoz (pl.: a hibatárhoz, élőadatokhoz stb.) történő hozzáférést egy külön erre a célra szolgáló K-vonalon lehet megvalósítani, melyre minden vezérlőt rákapcsoltak. Az adatátviteli összeköttetés, a kiolvasó ún. rendszerteszter (szkenner) és a jármű irányítóegységei között, a diagnosztikai csatlakozón keresztül jön létre. Az ilyen kapcsolatot (ebben a vonatkozásban) offboard kapcsolatnak, míg a vezérlők közötti belső kapcsolatot onboard kapcsolatnak nevezik. A K-vonal kétirányú kapcsolatot létesít a diagnosztikai készülék és a jármű belső hálózatán lévő vezérlők között egy szabványosított protokoll (ISO 9141, később ISO 9141-2) segítségével. Miután újabb és újabb területek kerültek elektronikus felügyelet alá, a diagnosztikai protokoll fejlesztése is folytatódott, így jutottak el a mérföldkövet jelentő „Keyword protocol 2000” megjelölésű változathoz, mely ISO 14230 szabványként azonosítható. A diagnosztikai kapcsolat felhasználása már jó ideje túlnőtt eredeti szerepkörén, hiszen pl.: a vezérlők flash programozására is alkalmassá vált.
Miután a vezérlőkészülékek száma folyamatosan növekedett, felmerült az igény olyan belső kommunikációs hálózat létrehozására, mely egy buszrendszeren keresztül az összes vezérlő adatcseréjét képes ellátni. Ismeretes, hogy meglehetősen sokféle buszrendszer született, de a csupán diagnosztikai célokat szolgáló egyvezetékes „ősi” K-vonalas buszrendszer (a folyamatos protokollmódosításokkal), a maga területén még sokáig kitartott. Az elmúlt évtizedben azonban egyre többen sürgették, hogy a szinte minden járműben használt CAN-rendszert tegyék alkalmassá diagnosztikai feladatok ellátására (azaz offboard kommunikációra) is. Mivel a CAN-rendszer fejlesztése a mai napig folyamatos, gondoljunk csak a kis sebességű, hibatoleráns (ISO 11898-3) változatra vagy TT-CAN (ISO 11898-4) megoldásra, megvizsgálták a K-vonali átvitelhez fejlesztett diagnosztikai protokoll változatokat, és a korábban említett ISO 14230 alapján elkészítették a CAN-diagnosztikai protokollt (ISO 15765), melynek ismeretében a „kiokosított” diagnosztikai műszer komplett vizsgálatot képes a járműhálózat vezérlőinél a CAN-busz segítségével elvégezni.
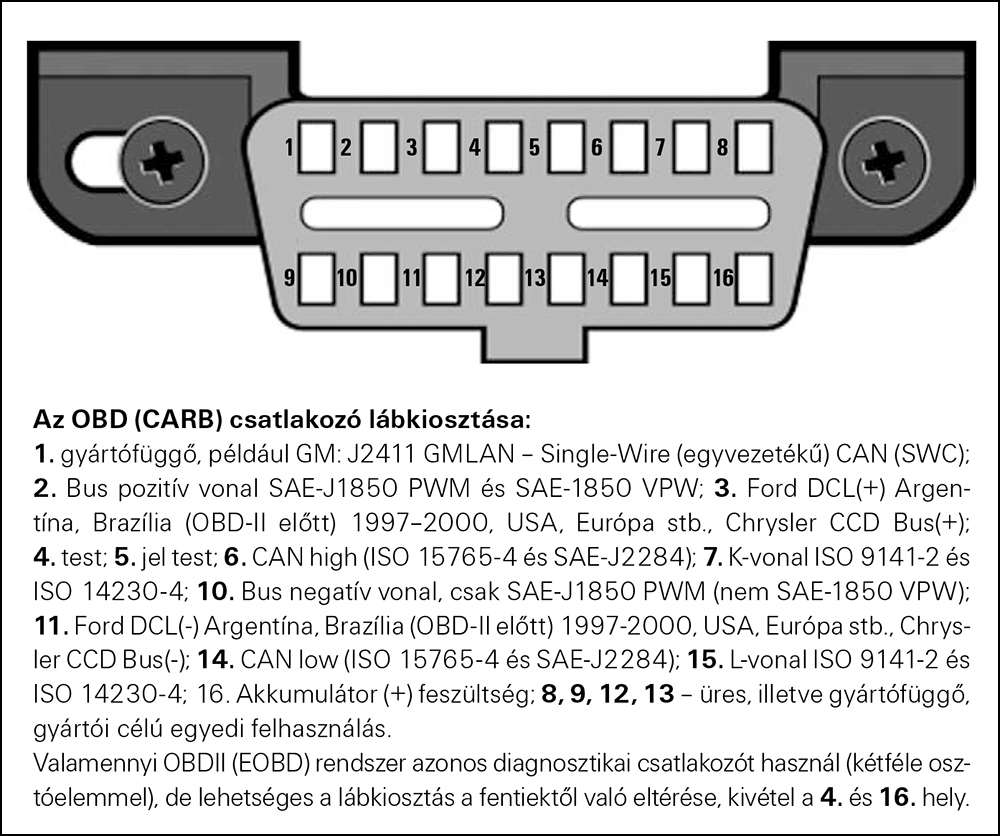
A rövid bevezető után vizsgáljuk meg, hogy az egyes járműgyártók milyen lehetőségek közül választhatnak, az OBD-csatlakozón keresztül elérhető CAN-buszos diagnosztika kialakítására. A cikk megírása abból az egyszerűnek tűnő kérdésből indult el, hogy az OBD-csatlakozó CAN-kivezető pontjai között egy multiméterrel a lezáró ellenállásokkal rendelkező CAN-vezeték névleges ellenállásértéke kimérhető-e.
Az 1. ábra még azt a „konzervatívnak” számító megoldást tünteti fel, ahol a jármű hajtáslánc-vezérlését megvalósító nagy sebességű CAN-busz és a karosszériakomfort oldalt kiszolgáló kis sebességű CAN-busz, valamint a diagnosztikai célokat szolgáló K-vonal, egy Gateway segítségével kapcsolódik egymáshoz. Ebben az elrendezésben a Gateway „lefordítja” a teszter adatkérő protokollját CAN-protokollra, majd a választ visszafordítja a teszter, illetve a kezelő által értelmezhető formába. A megoldás előnyeként említhető, hogy az egyes vezérlők felfűzése a K-vonalra megszűnik, és ez adott kábelmennyiség megtakarítását eredményezi, ugyanakkor a Gateway vagy a CAN-hálózat meghibásodása a diagnosztikai kiolvasást meghiúsíthatja. A kizárólag K-vonali csatlakozással rendelkező diagnosztikai műszerek ennél a kiépítésnél még jól használhatók, hiszen ahogy ez az ábrából kitűnik, a K-vonal belső ere továbbra is a diagnosztikai csatlakozó 7-es lábára kapcsolódik.
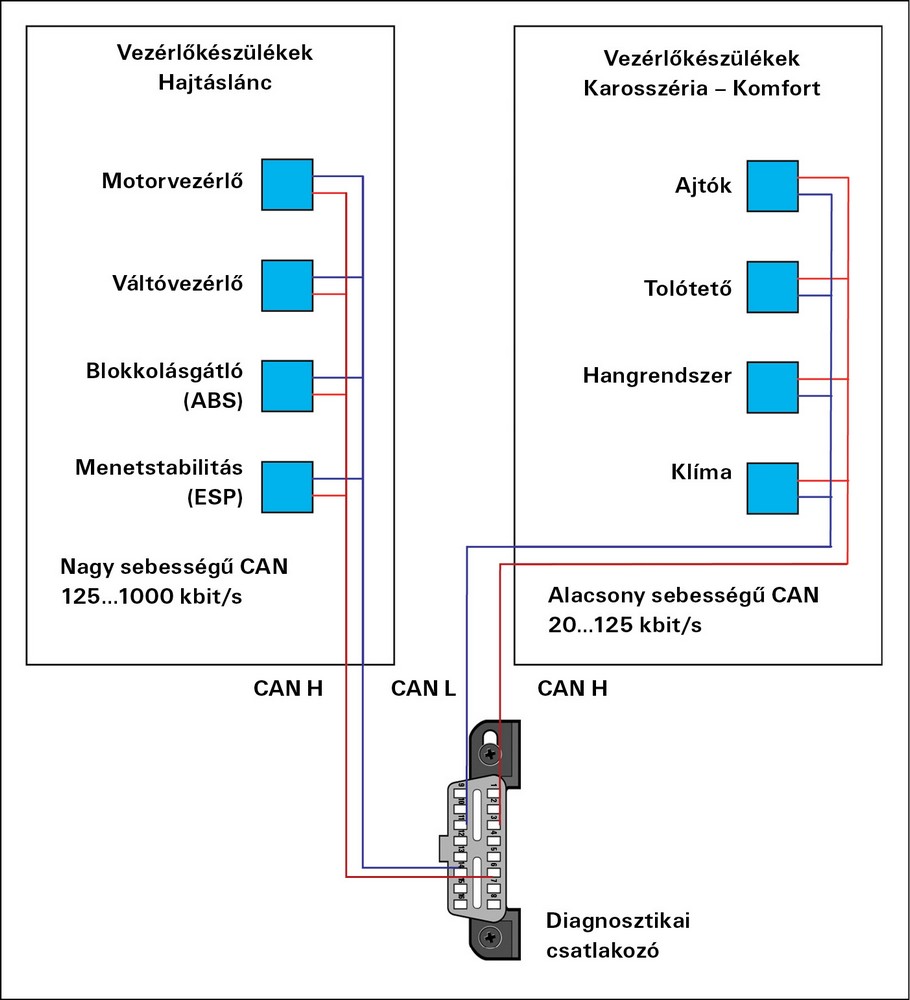
2. ábra
A 2. ábrán olyan megoldást láthatunk, melynél a Gateway, alapfeladatként továbbra is megoldja a két eltérő sebességű CAN-hálózat közötti belső információcserét, de a diagnosztikai csatlakozó felé egy harmadik fajta, csak a CAN-diagnosztikai protokollt (ISO 15765) használó hálózattal csatlakozik. Mivel a diagnosztikai teszter ismeri a szükséges protokollt, elküldi a kérést és értelmezi a választ, a különböző sebességű és buszfeszültséget használó rendszerjellemzőkre történő „fordítás” és „visszafordítás” továbbra is a Gateway feladata.
Első pillantásra úgy tűnhet, hogy az ábrán látható megoldásnál a diagnosztikai csatlakozó 6 és 14 lábai között (CAN-H; CAN-L) megmérhető a belső hálózat lezáró ellenállásainak értéke vagy a vonali feszültségek, hiszen a megadott lábakon roncsolás nélkül hozzáférhetünk a CAN-buszhoz, ez súlyos tévedés! Mivel a Gateway fizikailag szétválasztja, szoftveresen pedig összeköti a rá csatlakozó hálózatokat, az említett pontokon a belső hálózatokhoz fizikailag nem lehet hozzáférni, tehát sem a kis, sem a nagy sebességű CAN-rendszer említett adatait nem tudjuk kimérni! Amennyiben a diagnosztikai csatlakozóhoz nem kapcsolunk tesztert, az említett vonalak üresjáratban vannak, és rajtuk semmiféle adatmozgás nem tapasztalható.
3. ábra
A 3. ábra azt a változatot mutatja, amikor úgy a nagy sebességű CAN (6 és 14), mint a kis sebességű CAN (3 és 11) hálózat a diagnosztikai csatlakozó adott pontjaira közvetlenül kivezetett. Ennél a megoldásnál, a CAN-diagnosztikai programot használó teszter olyan kialakítású, melynél megválasztható, hogy melyik sebességű CAN-rendszerhez csatlakozzon. Az ilyen kialakításnál még olyan adatok is kiolvashatók az adott rendszerből, melyek a korábban bemutatott megoldásoknál nem érhetők el, azaz egy részletesebb, mélyebb diagnosztika végezhető. Ehhez természetesen a tesz-
ternek ismernie kell a tervezők által használt CAN-mátrix adatait, hogy ezeket a kezelő által értelmezhető formába alakíthassa.
Az ábrán látható megoldás diagnosztikai csatlakozójánál már valóban hozzáférhetők az egyes CAN-hálózatok vonalai, de a mérésekre vonatkozó szigorú szabályokat továbbra is be kell tartani.
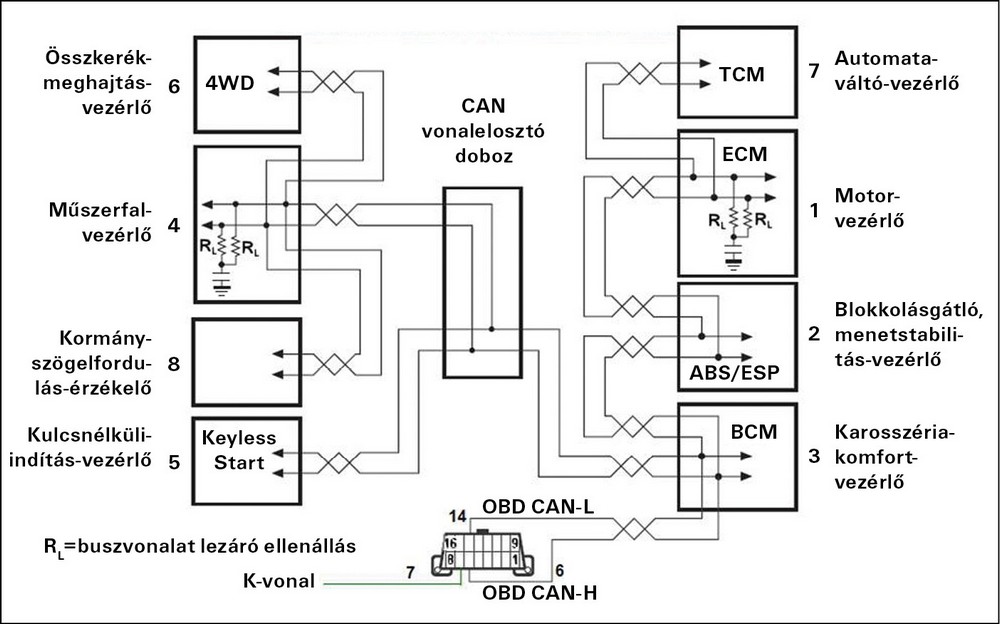
4. ábra: a Suzuki SX4 vezérlőinek CAN-buszos kapcsolata
Több járműgyártó is alkalmaz olyan megoldást, melynél csak egyetlen, általában nagy sebességű CAN-hálózatot használ, és erről üzemel a hajtáslánc, valamint a karosszériakomfort köre is. Erre a kialakításra mutat példát a Suzuki SX4 Can-hálózata (4. ábra). A diagnosztikai csatlakozón keresztül a gyújtás levétele és kellő idő, legalább 5 perc eltelte után a hálózat ellenállása kimérhető, melynek névleges értéke 60 ohm. Az ilyen kialakításoknál előfordul (bár állítólag 2008-tól már nem javasolt ez a változat), hogy a direkt kommunikációt biztosító K-vonal is kivezetésre kerül (7 láb), aminek feltétlen előnye, hogy a diagnosztika akkor is elvégezhető, ha az egyetlen, közös feladatot ellátó CAN-hálózat meghibásodik.

Végezetül a 5. ábrán egy olyan megoldás látható, mely a 3. ábrán mutatotthoz nagyon hasonló. Itt is kivezetik mindkét CAN-hálózatot a diagnosztikai csatlakozó korábban megadott pontjaira, de nem közvetlenül. Ugyanis egy relé érintkezőinek segítségével, talán éppen a közvetlen hozzáférés megakadályozása céljából, megszakítják a vonalakat, melyek csak akkor kapcsolódnak a diagnosztikai csatlakozóhoz, ha a csatlakoztatott teszter ezt a korábbi, de a rendszeren belüli vezérlőkkel összeköttetésben nem lévő K-vonal vezérlésével engedélyezi. Itt tehát a K-vonal már nem használható diagnosztizáláshoz, csupán relévezérlési feladatokat lát el. Természetesen a csatlakozó 7 pontjáról teszter nélkül is vezérelhetjük a relét, így mérési célból hozzáférhetünk a buszvonalakhoz, de mindenkor megfelelő óvatossággal kell eljárni.
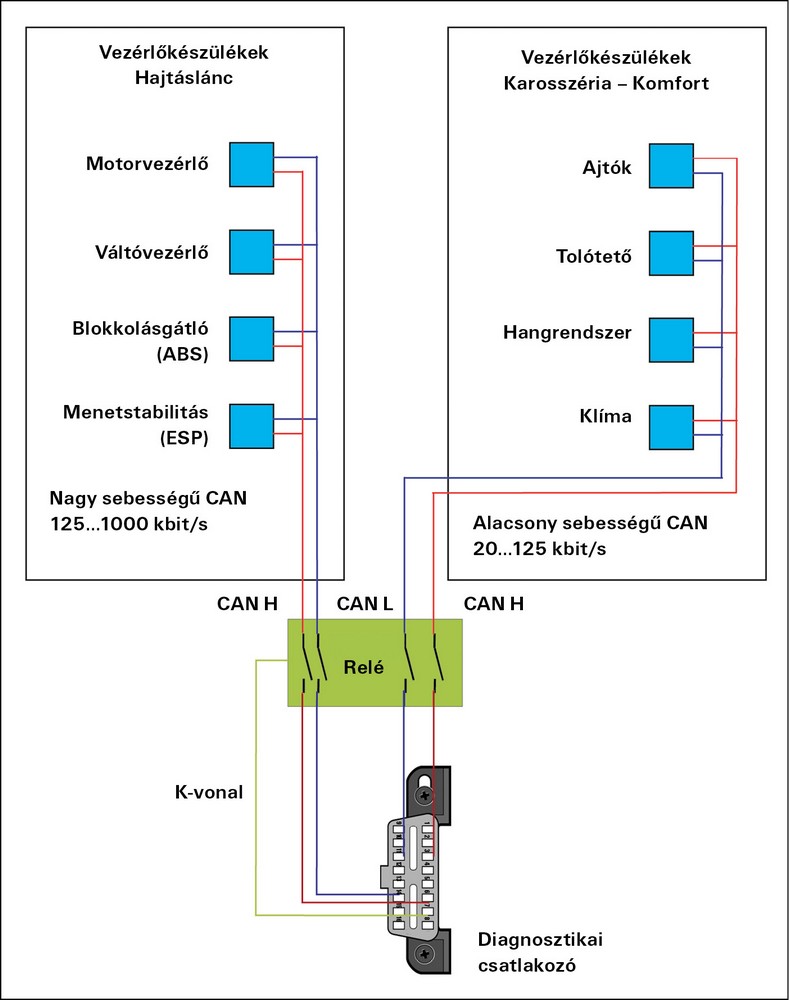
5. ábra
Összefoglalásként elmondható, hogy a kidolgozott protokoll segítségével precíz, minden igényt kielégítő diagnosztika végezhető a CAN-hálózat segítségével, ezért az újonnan gyártott gépkocsiknál a K-vonalas diagnosztika lassan már csak emlék marad. Azt azonban érdemes kihangsúlyozni, hogy mielőtt CAN-hozzáférési pontokat keresnénk a diagnosztikai csatlakozón, vegyük alaposan szemügyre a gyári kapcsolási sémát, mert csak ennek ismeretében dönthető el, hogy milyen kialakítási változattal van dolgunk.
Csúri György
Az ábrák forrása:
www.bosch.de/aa/de/Berufsschulinfo