
A BMW ACC-rendszerének újrakalibrálása
Napjainkban egyre nagyobb szerepet kapnak közlekedésbiztonsági szempontból is a vezetőt segítő rendszerek, mint például az ACC. Azonban ezek a rendszerek csak akkor működnek tökéletesen, ha megfelelően be vannak állítva. Cikkünkben a BMW karambolos javítás utáni kalibrálási technológiáját mutatjuk be.

A Bayerische Motoren Werke, azaz a BMW az elsők között volt, akik kifejlesztették és sikeresen alkalmazták az ACC-rendszert. Az ACC közel- és távolradarok segítségével képes érzékelni az előttünk haladó jármű távolságát, valamint sebességét. Képes tartani az előre beállított biztonságos követési távolságot, illetve sebességet, akár fékezéssel, akár gyorsítással. A BMW is felszereli járműveit (ha a vásárló igényt tart rá) közel-, vagyis NDS-, valamint távol-, azaz FDS-radarokkal. A kétféle radar közül csak a távolradar igényel beállítást.
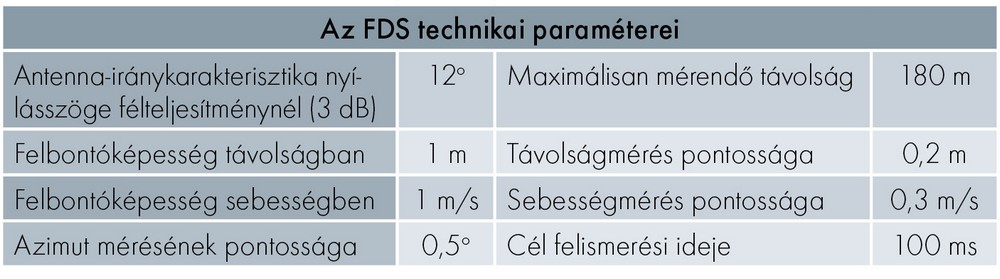
A távolradar technikai paraméterei
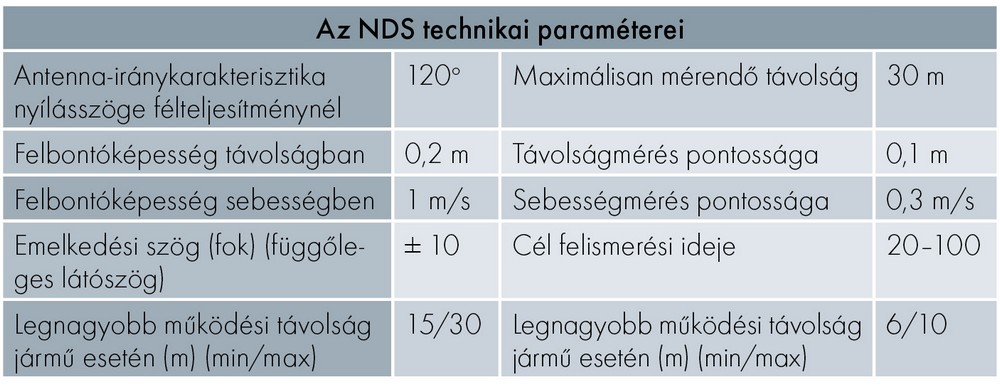
A közelradar technikai paraméterei
A kalibrálásra azért van szükség, mert ezek a radarok akár a jármű előtt 180 méteres távolságban is képesek érzékelni, és ezen a távolságon, a radarsugár akár 1 fokos vízszintes vagy függőleges eltérése az optimálistól, komoly hibákat okozhat a rendszer hibátlan működésében. A radarkalibrálás célja, hogy a jármű menettengelye és a radarsugarak tengelye párhuzamos legyen egymással. A közelradarok esetében ez a hibalehetőség nem áll fenn, mert ezek csak a jármű előtti 30 méteres területet vizsgálják, azt is jóval szélesebb tartományban, mint a távolradar. (Ezekből általában kettőt szerelnek be, amelyek érzékelési tartománya részben fedi egymást, ezért itt egy kis eltérés nem okoz gondot.) A közelradarokat nem is kell kalibrálni, mivel az érzékelési irányát meghatározza a beépítési környezet és az antennakarakterisztika.
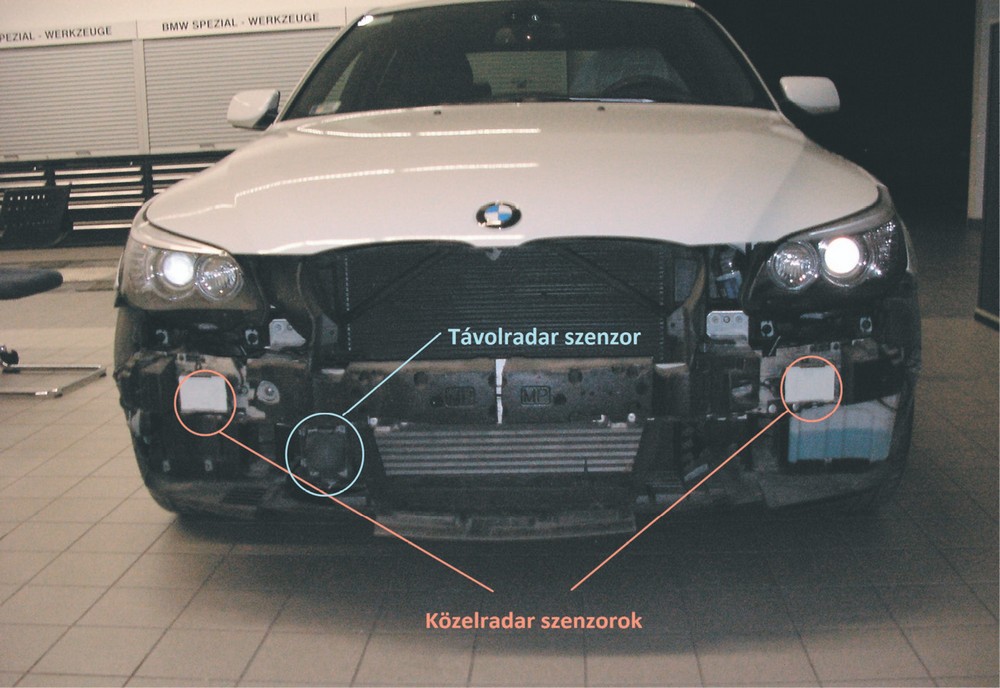
A BMW gépjárműveinél a távolradar- és közelradarszenzorok a lökhárító bal alsó légbeömlőjénél találhatók, mellette jobb és bal szélen találhatóak a közelradar szenzorai
BMW kalibrálási megoldása
Újrakalibrálásra akkor van szükség, ha:
– a hibatároló hibát jelez,
– a hátsó futóművön állítást eszközöltek,
– a járművön futómű-átalakítást végeztek,
– ha feltételezhető, hogy a tartókonzolt például ráfutásos baleset vagy hasonló következtében külső erőbehatás érte,
– jeladó- vagy jeladótartó-csere történt,
– ütközés esetén a radarszenzor elmozdult a helyéről,
– javítás során a szenzort eltávolították
– ACC-vezérlőegység-csere esetén,
– bármilyen ACC-vel kapcsolatos reklamáció esetén.
Az ACC radarkalibrálásához nincs szükség futómű-beállító padra, csak egy megfelelően vízszintes területre, egy tükörre, kerékre szerelhető gyorsrögzítőkre, lézerpointerre és egy diagnosztikai számítógépre. A jármű radarjának kalibrálása ma még csak márkaszervizben történik, jelenleg csak ott találhatóak meg a szükséges eszközök, berendezések.
A kalibrálás menete
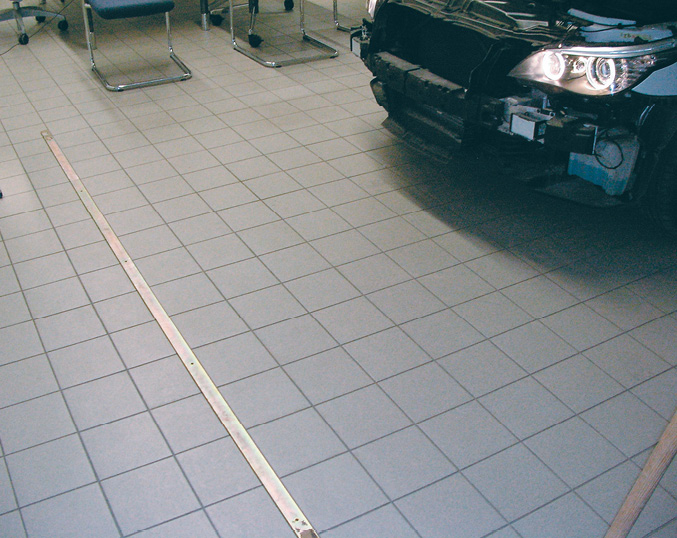
A gépjárművel beállunk a tükörtartó sín elé kb. 120 cm-re, lehetőleg úgy, hogy amennyire csak lehet, merőleges legyen a jármű tengelye a tartósínre. Állítsuk le a motort, majd csatlakoztassuk az akkumulátortöltő készüléket, valamint a diagnosztikai számítógépet.
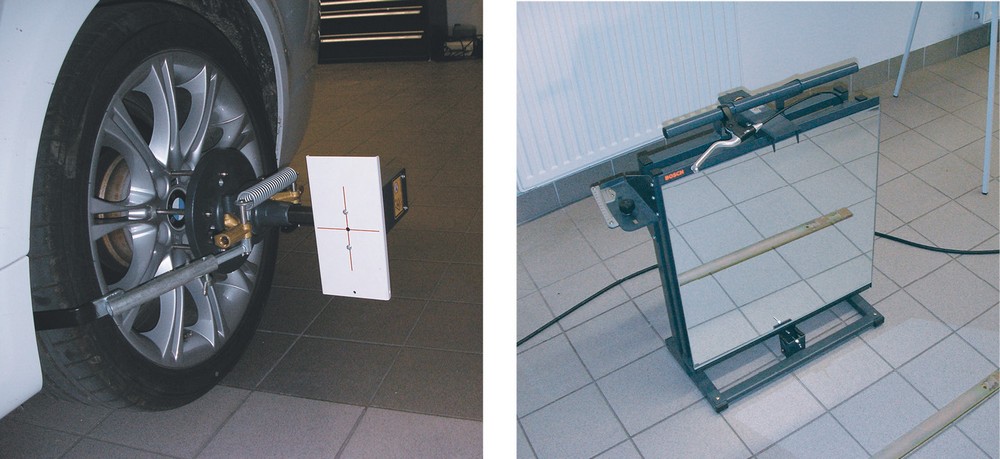
A hátsó kerekekre szereljük fel a járműspecifikus gyorsrögzítőket, ellenőrizzük, hogy megfelelően rögzültek, a beállítás során nem mozdulhatnak el. Miután ezeket felhelyeztük, illesszük hozzá és rögzítsük a lézerpointereket. A lézerfényt kibocsátó eszközt egy csap segítségével illeszthetjük a gyorsrögzítőhöz. Úgy kell állítani, hogy az egység háza vízszintesen álljon, vagyis a kibocsátott fénysugár a padlóra merőleges legyen, ezután a készüléket egy csavar segítségével elfordulás ellen biztosíthatjuk. Az eszközt külső energiaforráshoz nem kell csatlakoztatni, belső akkumulátorral rendelkezik. A kalibrálás megkezdése előtt ezeket a telepeket fel kell tölteni. A lézerfény egy kapcsoló segítségével kapcsolható.

Szükségünk van egy segédtáblára is, amelynek segítségével könnyebb beállítani a lézerfény irányát. Ennek a táblának állítható a magassága, és egy vízszintes irányú rés található rajta. A magasságát úgy állítjuk be, hogy a hátsó kerékre szerelt lézerfény-kibocsátó egység elé helyezzük, és bekapcsoljuk a lézert. A lézerfénynek át kell jutnia a táblán található résen, olyan magasra kell állítanunk a táblát, hogy ez megvalósulhasson. Miután ez sikerült, a táblát helyezzük el az első kerék mellett. A hátsó kerékre szerelt egységet most úgy kell irányítanunk, hogy a kibocsátott lézerfény az első kerék mellé helyezett táblán található résen át tudjon haladni.

A beállításhoz szükségünk van egy speciális állványra szerelt tükörre is. Az állvány lehetővé teszi a tükörlap vertikális és horizontális állítását. A tükör a keret segítségével a jármű előtt található sínre illeszthető, és egy fék segítségével rögzíthető. A keretet illesszük a sínre, állítsuk a keretet függőlegesre, a rajta található állítókerék és vízmérték segítségével. Ezután toljuk el oldalra addig, amíg a hátsó kerekekre rögzített készülékből érkező lézerfénysugár útjába nem kerül, majd rögzítsük. A tükröt úgy kell beállítanunk, hogy a rá érkező lézerfényt, ugyanazon az úton amin érkezett, vagyis a segédtábla résén keresztül, a fényforrásba tükrözze vissza. Ezt a vertikális és horizontális állítókerekek segítségével állítjuk be.
Amikor sikerült a tükröt olyan helyzetbe állítani, hogy a fénysugár pontosan a kiindulási helyére reflektálódjon vissza, akkor olvassuk le és jegyezzük fel a tükör vízszintes és függőleges kitérítési mértékét. Ezt a tükörkeretre szerelt skálák segítségével tehetjük meg tizedes pontossággal, például:
– vertikális jobb oldalon: 12,8 mm,
– horizontális jobb oldalon: 51,4 mm.
Ezeket a beállításokat el kell végeznünk a jármű másik oldalán is. Miután megkaptuk a kétoldali tükörbeállítási adatokat, ki kell számolnunk a megfelelő értékek számtani közepét, és ezekre az értékekre kell állítanunk a tükröt.
Például ha a mért értékek a bal oldalon:
– vertikális bal oldal: 10,8 mm,
– horizontális bal oldal: 77,2 mm,
a jobb oldali adatokat lásd fent, akkor a tükröt a következő értékekre kell állítani:
– horizontális: (12,8 + 10,8) / 2 = 11,8 mm,
– vertikális: (51,4 + 77,2 ) / 2 = 64,3 mm.
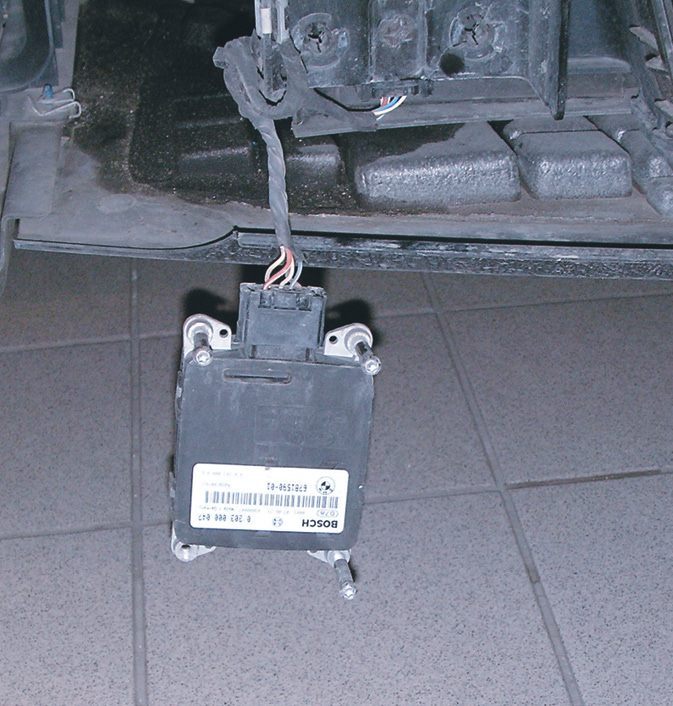

A felső képen a radaregység hátoldala látható a három tájolócsap segítségével. Az alsó képen a radarszenzor rögzítésére szolgáló konzol. A konzol három helyen oldható bepattanó kötések segítségével tartja a helyén, fixen a radaregységet
Miután ezeket az értékeket beállítottuk, a keretet a sínen a gépjárművön elhelyezett radarszenzor elé kell állítani. A már csatlakoztatott diagnosztikai számítógépen indítsuk el a kalibrálóprogramot. Válasszuk ki a számítógépen a jármű típusát, felszereltségét, majd a megfelelő helyre írjuk be a tükör beállítási értékeit. A tükör vertikális irányba egy állítószerkezet segítségével három állásba billenthető, első, középső, hátsó. A mérés megkezdése előtt állítsuk a tükröket középső állásba.
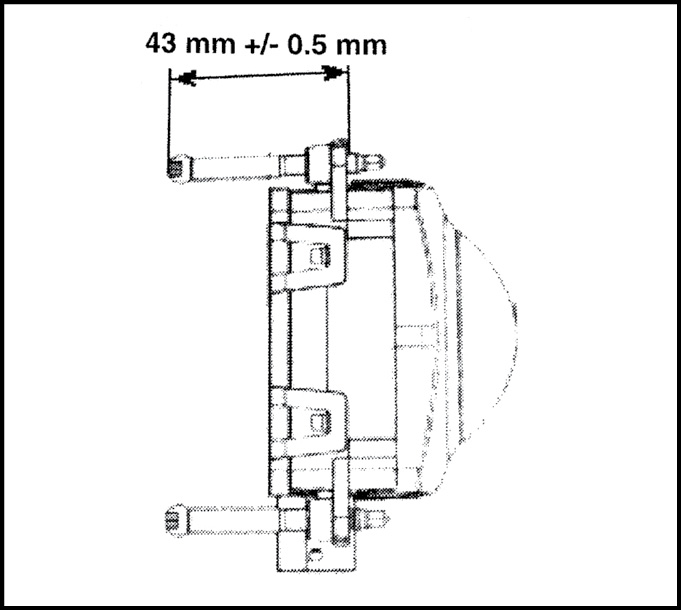
Durva beállításként a radarpozicionáló csapokat 43 ± 0,5 mm-re állítsuk, majd illesszük a helyére a radaregységet.

A csapok állítása speciális csavarhúzóval, a radaregység hátoldala felől lehetséges. A radaregységen három darab csap található, ezek közül kettő állítható, egy pedig fix, ez csak forgáspontként funkcionál. A két állítható csap közül a felsővel a vertikális irány, az alsó pedig a horizontális irány állítására van lehetőségünk.
A kalibrációelindítás előtt győződjünk meg róla, hogy a radaregységet megfelelően rögzítettük a helyére, és a szenzor szennyeződésmentes. A mérés elindítása után a számítógép mérések sorozatát fogja végezni, nekünk közben a megjelenő utasításoknak megfelelően a tükörlapot a három választható állás közül a program utasításai szerint kell állítgatni. Három mérés után a számítógép megadja, hogy a szenzoron található állítócsavarokon milyen irányban mennyit kell állítani.
Például a horizontális állítócsavaron 44 fokot balra, ami 0,1 fordulatnak felel meg. Miután állítottunk a csavaron újabb mérés kezdődik, amely addig folytatódik, amíg a tükörről pontosan a radar közepébe tükröződnek vissza a radarsugarak, vagyis az eltérés 0 lesz. Számítógépes kalibráció után a járművet próbaútra visszük és éles helyzetben is teszteljük az ACC működését.


