Közúti szállítás kötelékbe szervezett járművekkel
Jelenleg az áruszállítás növekvő hányada a közúton történik. Ezért az autópályák és az autóutak egyre zsúfoltabbá válnak egész Európában. A szakemberek folyamatosan keresik a lehetőségeket, amelyek a közlekedést a jelenlegi infrastruktúra mellett hatékonyabbá tudják tenni. Ezzel párhuzamosan fontos törekvés a közlekedésbiztonság növelése. Újabb és újabb vezetőt támogató asszisztens rendszereket alkalmaznak. Ez a két terület kapcsolódik össze a kötelékbe szervezett járműveknél.
A tehergépkocsik járműkötelékekbe szervezésével már több mint egy évtizede világszerte számos projekt foglalkozik. 1996-ban kezdődött a Mercedes projektje a „Promote chauffeur” (támogatott vezető). 1999. június 1-jén Németországban az A 81-es autópályán mutatták be a projekt eredményét, amit „elektronikus vonóberendezés”-nek is neveztek.
A menetoszlopmozgás-szabályozás fontosabb elemei
A két autópályán haladó Mercedes teherautót az elektronika kapcsolta egymáshoz. Az első gépkocsit vezetője gyorsította, lassította, kormányozta a szokásos módon, a második pedig nélkülözve minden mechanikus kapcsolatot, feltűnően kis távolságból követte az előtte haladót. Az első gépkocsi menetdinamikai adatai a fedélzeti elektronikából rádiófrekvenciás (2,4 GHz) jelátvitellel kerültek a második gépkocsi fedélzeti elektronikájába, amely ugyanazokat a beavatkozási parancsokat adta ki, mint az előtte haladó. A két központi elektronika „time-triggert area”-t alkot (ütemezett frissítésű terület). Az együtt megtett útszakasz után természetesen bármikor önállósíthatja magát a két gépkocsi.
A vezetőt támogató, intelligens, elektronikus asszisztensrendszereket építettek be a két gépkocsiba és telematikai összeköttetést valósítottak meg közöttük. A fejlesztések középpontjában az elektronikus rendszerek megbízhatóságának növelése volt, méghozzá szélsőséges útviszonyok, forgalmi helyzetek és időjárási körülmények között. A kötelékben haladás műszaki előfeltétele az automatikus (kétkörös hidraulikus) kormányzás az ABS-szel ellátott elektronikus fékrendszer és az elektronikusan vezérelt automatikus működésű sebességváltó.
Ennél a több mint egy évtizeddel korábban bemutatott rendszernél a biztonság érdekében a két teherautó között optikai összeköttetést is megvalósítottak. A követő jármű két videokamerája menet közben folyamatosan az előtte haladó teherautó hátuljára szerelt infravörös jeleket adó egységet figyelte. A kamerák által érzékelt információkat feldolgozva az elektronika meghatározta a távolságot és az irányváltozásokat.
Mivel a követő jármű az előtte haladó „szélárnyékában” halad, jelentős (10–15%) tüzelőanyag-megtakarítás érhető el. A másik előny, hogy az egymáshoz közel haladó gépkocsik kisebb területet foglalnak el az útból, ami csökkenti a zsúfoltságot.
A Knorr-Bremse TruckDAS projekt eredménye
Kettőnél több gépkocsi is haladhat biztonságosan kötelékben. Ezt bizonyította az elmúlt év őszén a Knorr-Bremse bemutatója, a tököli repülőtéren. Az egyes gépkocsikat önálló működésre is alkalmas, vezetőt támogató, elektronikus rendszerekkel látták el. Így minél rövidebb, de még biztonságos követési távolságot tudnak tartani. A három gépkocsiból álló kötelék menet közben kisebb útfelületet vesz igénybe, gyorsabban, kevesebb megállással, határozottabban haladhat. Fokozottabban ki használható a légellenállás csökkenése. A követő gépkocsik vezetői menet közben más tevékenységet végezhetnek. Eközben biztonságos és hatékonyabb lesz az áruszállítás. A kötelékbe szervezett szállítás olyankor alkalmazható hatékonyan, amikor több gépkocsi, hosszabb távon, azonos útszakaszon közlekedik. Az automatizált vezetés révén biztonságosabbá és költséghatékonyabbá tehető a szállítás.

A Knorr-Bremse kötelékben haladó teherautói 2011-ben a tököli repülőtéren
A kifejlesztett rendszernél a szokásos GPS-es helyzetmeghatározási módszereken kívül a gépkocsira különböző elektronikus érzékelőket szereltek, melyek folyamatosan mérik egyebek között a sebességet, az oldalgyorsulást, a követési távolságot. A gépkocsik pillanatnyi helyzetét, menetállapotát nagy mintavételi gyakorisággal határozzák meg. A különböző érzékelők kombinációja arra is lehetőséget ad, hogy pontosabban ellenőrizhető legyen a rendelkezésre álló adatok helyessége. Az elöl haladó és a követő járművek pillanatnyi helyzetének pontos ismerete révén a ráfutásos balesetek kiküszöbölhetővé válnak.
A gépkocsioszlop haladását szabályozó rendszer
Az egymás mögött haladó gépkocsik egy úgynevezett „elosztott szabályozási kör”-t alkotnak. A helyzetmeghatározásnál és kommunikációnál bekövetkező bizonytalanság miatt, az egyes tagok között különböző mértékű, hosszanti irányú lengések alakulhatnak ki. Az útszakasz vonalvezetésétől függően természetesen keresztirányú lengések is történhetnek. Ezek a járművek közötti lengések egyrészt csökkentik a komfortérzetet, másrészt viszont bizonyos közlekedésbiztonsági kockázatot is jelentenek. A projekt keretében az egyik kitűzött cél egy olyan szabályozó algoritmus kifejlesztése volt, amely megakadályozza a járműoszlopban a lengések kialakulását.
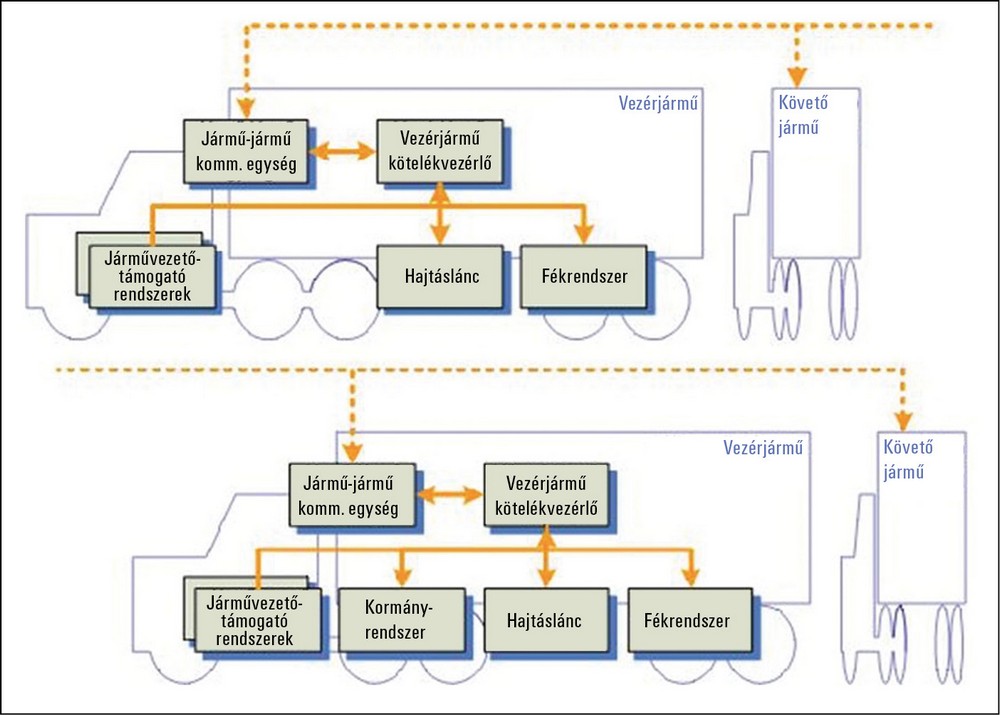
A gépkocsioszlop haladását szabályozó rendszer az egyes járművek részére egy cél-mozgásvektort határoz meg. A gépkocsikba szerelt elektronikus rendszerek arra törekszenek, hogy ezt valósítsák meg. Ehhez biztosítani kell a tagok közötti, a valós idejű adatcserét. Az információkat az egyes gépkocsikra szerelt érzékelők adják. Szükség van továbbá olyan beavatkozóegységekből álló rendszerre is, mely a gépkocsik teljesen automatikus irányítását lehetővé teszi. A hosszirányú dinamikai szabályozás határozza meg elsődlegesen a gépkocsikból álló kötelék biztonságát és stabilitását.
Fontos szempont, hogy az algoritmus hogyan kezelje a rendszer stabil és instabil állapotait.
Az oszlopban haladó gépjárművek irányításának fontosabb fázisai:
– a kötelék összekapcsolása,
– a mozgásban lévő összekapcsolt kötelék haladása,
– a kötelék szétbontása.

A Mercedes „Promote Chauffeur” kötelékben haladó teherautói 1999-ben
Többfajta jármű-összecsatolási és szétválasztási módot dolgoztak ki a hozzá tartozó matematikai modellekkel együtt. Az összecsatlakozás különböző lehetőségei közül példaként egy lehetséges változat: a második rész felgyorsít egy meghatározott sebességkülönbségig. Amikor közelít az első szakaszhoz, lelassít annak sebességére a megfelelő távolságban és utána elkezdődhet az együtt haladás. Minél kisebb a sebességkülönbség a menetoszlop két fele között, annál kevesebb energia szükséges.
Autópályán a kijáratok adják a lehetséges szétkapcsolási pontokat. Itt a konvojt több egységre kell bontatni, az egyes gépkocsik szabad mozgása érdekében. Ha túl hosszú a kötelék, a forgalomban részt vevők hosszabb várakozásra kényszerülnek. Ezeket a szempontokat is figyelembe véve készültek el a szükséges egyenletek és a hozzá tartozó paraméterek. A szabályozási stratégia terén elkezdődött egy szabadalom kidolgozása.
A járművek közötti kommunikáció
Az oszlopban haladó gépkocsik irányításához egymás közötti adatátvitel szükséges. Fontos megoldandó feladat a járműegyedek közötti kommunikáció megvalósítása. Bizonyos forgalmi szituációkra kell felkészíteni a rendszert. Meg kellett határozni, hogy milyen tulajdonságú legyen a vezeték nélküli kommunikációs rendszer, mely a kötelékszabályzás követelményeinek megfelel. Az együtt közlekedő gépkocsiknak is bizonyos előre meghatározott tulajdonságokkal kell rendelkezni. A vezeték nélküli kommunikációs technológiák közül az IEEE 802.11 b/g szabvány szerinti adatátvitel valósul meg. A gépkocsin belüli adatátvitel vezetékes perifériák oldaláról CAN 2.0 B, RS-232 és SPI kommunikációval működik.