
A LIN-hálózat és a generátor
Az Autótechnika 2006/9. számában már megjelent egy rövid ismertetés, „Generátor a LIN-hálózatban” címmel. Mivel ez a rendszer egyre jobban terjed a gépjárművekben, az alábbiakban bővebben ismertetnénk a LIN-hálózatot, és ezen belül a generátor működését.
Az utóbbi időben gyártott személygépkocsik jelentős része már rendelkezik több olyan bonyolult funkcióvezérlő egységgel, melyek fontos szerepet játszanak a jármű működésében. Az egységek között gyors adatátvitel szükséges. Ezt egy olyan, számítógépes technológián alapuló rendszer biztosítja, ami már nem a kábelek sokaságán keresztül valósul meg, hanem egy közös adatgyűjtő és vezérlőegység koordinálásával egy kábelpáron történik. A rendszer neve a már ismert CAN-busz (Controller Area Network), aminek a működéséről és vizsgálatáról már több cikk is megjelent az Autótechnikában (2003/12., 2004/1., 2005/9. stb.). A rendszer segítségével történik a jármű fontos egységei között (ABS, ASR, gyújtás, váltó, fék stb.) a nagy sebességű adatátvitel.
A másik, kevésbé ismert rendszer, ami a mai korszerű járművekben már szintén megtalálható, ez a „LIN”-rendszer (Local Interconnect Network). A LIN egy olcsó, kis sebességű adatátviteli hálózat, ami néhány száz ms változási sebességű jelek esetén alkalmazható sikeresen. Nagy sebességű beavatkozásra nem célszerű használni.
A rendszert 5 nagy európai autógyár az AUDI, a BMW, a DAIMLERCHRYSLER, a VW, a VOLVO, valamint 2 félvezetőgyártó cég, a VOLCANO és a MOTOROLA tervezte és alakította ki úgy, hogy a meghajtók és a vevőáramkörök követik az ISO 9141 szabványt. A már ismert és használt hibakeresés, kódolvasás itt ugyanúgy lehetséges, mint a CAN-nél. Az alkalmazott szabvány nyitott, tehát az autógyáraknak nincs előírt műszaki kötelezettsége, de az eddigi tapasztalatok azt mutatják, hogy általában alkalmazzák a rendszer paramétereit.
Először 2001-ben használták a rendszert járművekben, de 2003-tól már rendszeresen alkalmazzák az autógyárak. Átlagosan mintegy 5 és 12 között lehet a LIN-hálózatra rákötött funkciók száma. Ezek lehetnek: ablaktörlő-vezérlés, ajtózár-működtetés, világítás, klímaszabályozás, kormányzás, ülésállítás, generátorszabályozás, tetőnyitás stb.
Nézzük meg, hogy a mostanában használt rendszereknél (CAN, LIN stb.) a költségek az adatátvitel függvényében hogyan alakulnak (1. ábra).
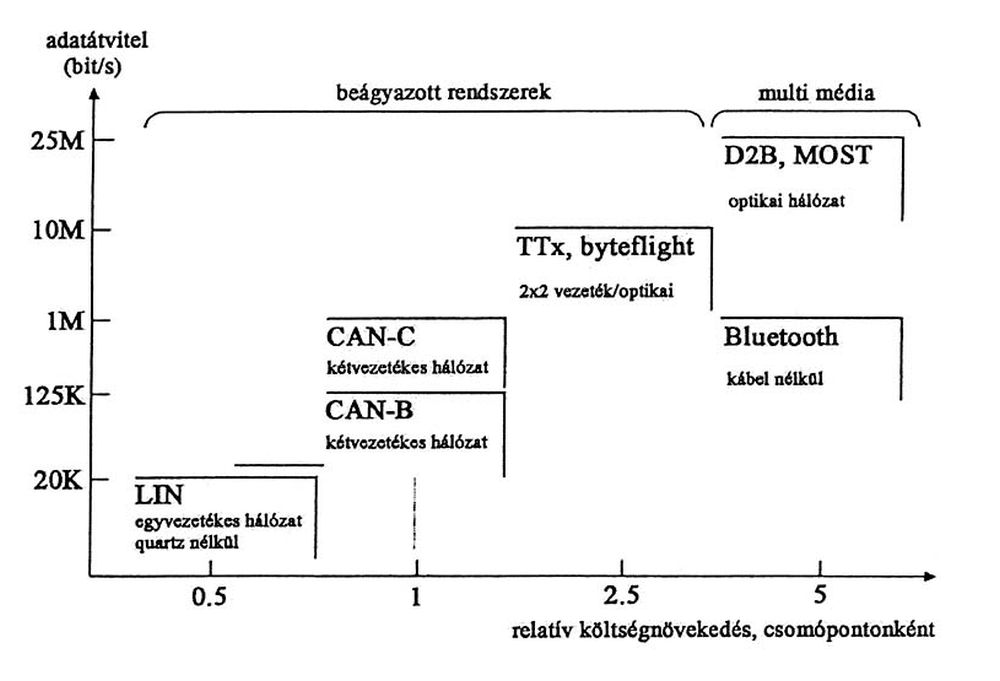
1. ábra: járművekben használt hálózatok összehasonlítása
Láthatjuk, hogy a CAN-hálózat a táblázat első harmadában található, a LIN-rendszer pedig a legolcsóbbak közé tartozik. A legnagyobb átvitelű sebességű rendszerek a legdrágábbak, pl. az optikai kábelrendszerek és a MOST (Media Oriented Transport). Ezek jelenleg még általánosan nem használtak, illetve csak a drágább járművekben találhatóak meg.
Hogyan működik a LIN-hálózat?
A rendszer egy vezetéken kétirányú adatforgalmat tud lebonyolítani kedvező árú mikrovezérlőkkel. A koncepció, amivel ez történik, az elektronikában már jól ismert megoldás, a single-master/multiple slave, azaz az egy mester, több szolga felépítés.
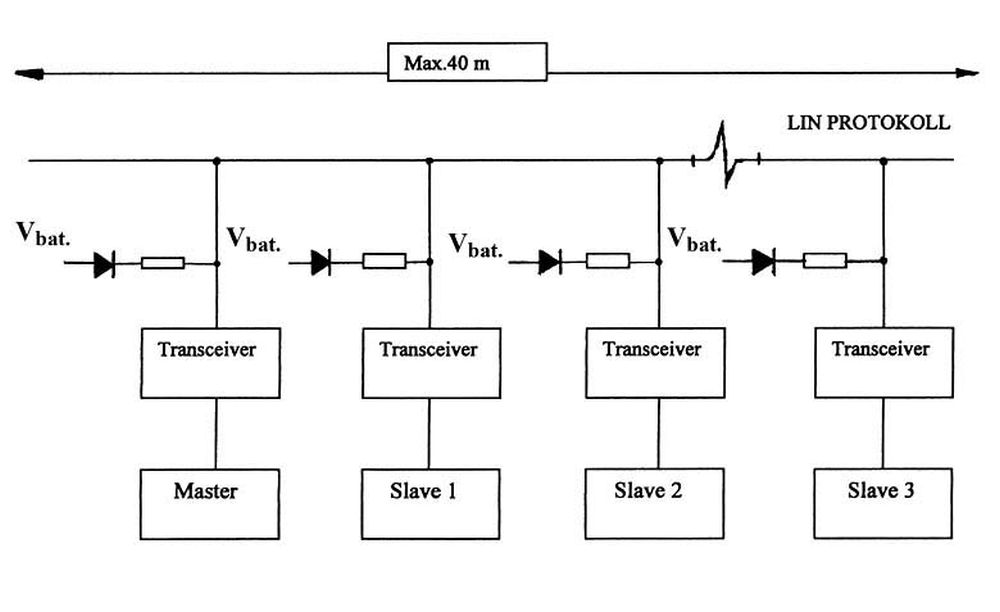
2. ábra: egy jellegzetes LIN-protokoll
Az adatátviteli sebesség 20 Kbit/s. Külső kvarc nem szükséges, elegendő egy belső RC-oszcillátor is. Ezekre a feladatokra fejlesztettek ki olyan alkalmazásspecifikus integrált áramköröket (ASIC), melyek a fent említett adatátviteli feladatokat megoldják. Ezek az úgynevezett mikrokontrollerek vagy mikrovezérlők. A 2. ábrán egy jellegzetes LIN-protokoll látható. A digitális adatátvitel a hálózatban, adatkeretekkel, csomagokkal történik, ami szintén egy szabványosított, ún. „8N1” formátum segítségével jön létre. A részletes és nem egyszerű digitális leírást elhagyva a protokoll az alábbiak szerint üzemel:
A mester vezérli a buszt az egyes szolgaeszközök lekérdezésével. A szolgák csak a mester felszólítására adhatnak választ, amely kétirányú adatforgalmat tesz lehetővé, „arbitráció” (döntési képesség) nélkül. Az üzenet a következőkből áll: szinkronszünet, szinkronizálási mező, üzenetmező. Az üzenetben található még azonosító jel is, mely az állomást, az adatok típusát és az üzenet hosszát azonosítja. Minden üzenetre csak egy szolga válaszolhat, és csak a mester utasítására közölhet adatot a buszra. A rendszer tartalmaz még „sleep”, alvó üzemmódot is, amikor a fogyasztás minimálisra csökken. Bármely buszra csatlakozó eszköz ébreszti a buszt.
A LIN-hálózat közvetlenül nem kompatibilis a CAN-busszal, de mivel a két rendszer egymást kiegészítve működik, egy úgynevezett átjáró, csatolóeszköz, „gateway” segítségével lehet megadni a kompatibilitást és hozzáférést a központi egységekhez.
Röviden tehát összefoglalva a LIN-hálózat előnyeit:
– egyvezetékes, kis költségű megvalósíthatóság,
– ISO 9141 alkalmazása, könnyű diagnosztikai hozzáférés,
– adatátvitel kis sebességgel, 20 Kbit/s, EMI- (elektromágneses interferencia) kockázat csökkentése,
– egy mester/több szolga koncepció, ahol nincs döntési képesség,
– kis költségű, célorientált (ASIC) mikrokontrollerek,
– saját RC-oszcillátor, megtakarítva a kvarc vagy keramikus oszcillátort,
– sleep üzemmód és garantált feléledési idő az adatátvitelnél.
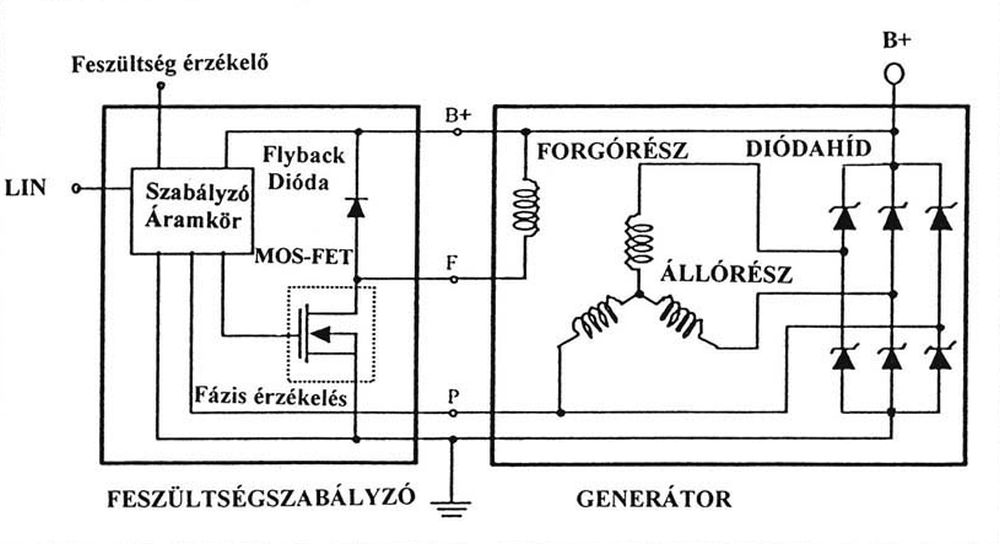
A 3. ábrán egy LIN által ellenőrzött rendszerben működő generátor szabályozása és töltési módszere látható. Természetesen ebben az esetben a végrehajtó részeknél (generátor, szabályzó) bizonyos változtatásokra van szükség, hogy ezek a LIN-hálózatban tudjanak működni. A szabályzót át kellett építeni, és így létrejött egy ún. „vastagréteg hibrid modul”, ami tartalmaz LIN-csatlakozót, egy MOS-FET térvezérlésű tranzisztort, valamint egy „flyback” diódát (4. ábra). A tranzisztor nagy frekvenciákkal rövid kapcsolási időket tud megvalósítani, kis teljesítményű vezérléssel. A dióda nagyon gyors feléledésű (trr=20–50 ns), segítségével az áram- és feszültségcsúcsokat, tranzienseket ki lehet zárni.
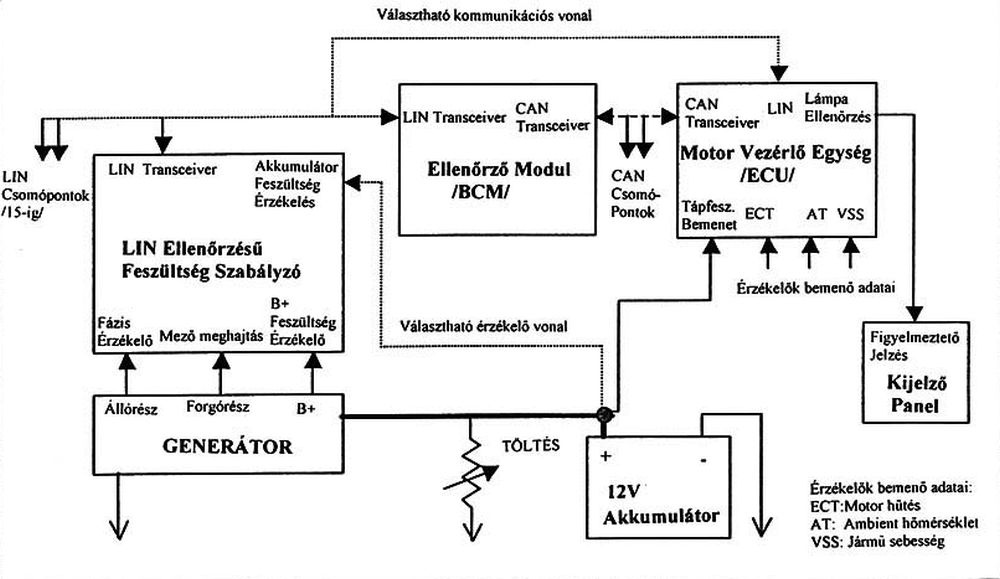
3. ábra: a LIN-hálózat által felügyelt töltési rendszer
4. ábra: egy LIN-ellenőrzésű feszültségszabályozó
A létrejött modul nagyon pontos gyártású, az alkatrészek tűréshatára 1%-os, tehát a különböző feszültség- és áramérzékeléseket pontosan tudja követni. Széles hőmérséklet-tartományban képes működni (–40 °C – 150 °C). Rövidzár ellen védett, valamint ESD- és EMI-immunis. A szabályzót egy ugyanolyan tokba integrálták, mint a hagyományos szabályzót. A típus IRVR 101 (címkép).
Mivel a LIN-hálózat segítségével interaktív kapcsolat jön létre a motor, a generátor szabályozó és a központi egység (ECU, BCM) között, a töltést és a többi működési paramétert folyamatosan optimalizálni lehet.
Végezetül nézzük meg konkrétan, hogy a LIN-hálózat segítségével milyen szabályozásokat tud végezni egy korszerű generátor. Mivel természetesen digitális rendszerről van
szó, az értékek, lépések rendkívül sok szabályozási variációt tesznek lehetővé.
– A töltésfelfutási idő szabályozása 16 lépésben, 0,426 s – 13,2 s-ig lehetséges. A megjelölt idők alatt fut fel a gerjesztés 0–100%-os értékre, ezt hívják „soft” startnak is. LIN-hálózat nélkül, némely szabályozónál a késleltetés szintén lehetséges, de csak egy időponttal, ami 2,5, 7,0 vagy 10 másodperc.
– A felfutás kikapcsolása bizonyos generátorfordulatoknál. Ez 16 értékben lehetséges 2400–8000 rpm tartomány között.
– A gerjesztőáram korlátozása. Ez 32 értékben lehetséges, 2,0–7,75 A-ig.
– A gerjesztőáram %-os működési periódusának korlátozása. Ez 32 értékben lehetséges 0–100%-ig.
– Állapotjelzés-küldés a szabályzóból (hibaüzenet):
nagy hőmérsékletnél,
mechanikai hibánál,
elektromos hibánál.
– A gerjesztés üzemi %-nak a jele, és ennek küldése a szabályzóból a központi egységnek. Ez 32 értékben történik, 0–100%-ig. Az információ a kimenő áram és a generátor nyomatékának ellenőrzése miatt szükséges.
– A gerjesztőáram kimenő jele a szabályzótól. Ez 32 értékben lehetséges. Segítségével a kimenő áram és nyomaték kalkulációját lehet állítani. 0–7,75 V-ig terjed.
– A szabályzó hőmérsékletének kimenő jele, 32 értékben, –29 °C – 157 °C-ig. Ez szintén a kimenő áramot befolyásolja.
– A feszültségszabályozás, az ún. „Setpoint” értékek. Ez 55 lépésben lehetséges, 100 mV-os felbontásokban. 10,7 V – 16,0 V-ig (pl. 15,6 V – 15,7 V – 15,8 V stb.).
A leírtak alapján láthatjuk tehát a LIN-hálózatban alkalmazott generátor sokrétűségét és nagyobb tudását az eddigiekhez képest.
A gyakorlati életben, a javításoknál a rendszer nem jelent különösen nagyobb hátrányt. A LIN-vonal hibáját, mint már fentebb említettem, az ismert diagnosztikai módszerekkel lehet behatárolni. Ebben az esetben töltés továbbra is van (korlátozott mértékben), mivel a szabályzó képes öngerjesztést végezni, ha a fázisfeszültség nagyobb mint 0,6 V és a generátor fordulata több mint 1200 rpm.
A szabályzót hiba esetén ugyanúgy cserélni kell, mint a hagyományos szabályzót. Javítani nem lehet. A generátor további részeit a már eddig is ismert módon szükséges javítani, felújítani.
Horváth Péter
Fer-Vill Kft.


