
24 GHz-en működő radarhálózat
1. Bevezetés
Radar-jelfeldolgozásban a bemért tárgyakat korábban általában folt jellegű ún. folt cél modellben történő felhasználhatóságuk alapján vizsgálták. Ez a módszer elegendő az ACC-ben alkalmazott követési távolság szabályozásánál (távol radar), de már nem használható az utcai közlekedésben történő alkalmazásban (közel radar).
Ennek egyik oka, hogy a városi közlekedésben a gépjárművekben alkalmazott radarszenzorok felbontóképessége – amely az igen rövid idejű impulzusoknak köszönhető – távolságban igen jó, így a tárgyakat már nem folt célként kezelik. A másik ok, hogy a mért jelek alkalmazhatóságának felismeréséhez és azok további automatikus felhasználásához olyan részletes analízis szükséges, amely az adott forgalmi körülmények és a mért adatok közötti összefüggést vizsgálja. Felbontás alapján vezetik le a cél terjedelmének fogalmát, ami egy adott céltárgy mérése során kapott legnagyobb és legkisebb érték különbsége. Ez tehát a céltárgy méretét jelenti.
A radarmérések során a kisugárzott és a vett jelek szóródnak, ezáltal a visszavert teljesítmény is csökken, ugyanakkor a szóródás többutas terjedést hoz létre. A többutas terjedés az oka annak a jelenségnek, hogy a jármű felé tartó gyalogos mérésekor ugyanazon a helyen több eltérő sebesség is mérhető. De előfordulhat az is, hogy a saját jármű felé párhuzamosan haladó két jármű távolsága és sebessége is hamis adatként jelentkezik a mérés során, sőt fiktív céljeleket is kapunk (fiktív az a céljel, amelyik valós céljelként jelentkezik, pedig valójában nem is létezik). A fiktív céloknak nemcsak a távolsága lehet hamis, hanem a látható szöge is, vagyis a céljel nem ott van és nem olyan sebességgel mozog mint valójában, esetleg ugyanaz a valódi céljel több céljelként jelentkezik.
A feldolgozás során tehát többféle módon értelmezhető adatok kerülnek a rendszerbe és ez a hibák fő oka. Az ilyen adatok kiküszöbölését célzó eljárások hibái, hogy nem veszik figyelembe a kiterjedéssel rendelkező célokat. Jelenleg a többféleképpen értelmezhető adatokat redundanciával rendelkező rendszerrel küszöbölik ki. A kiterjedéssel bíró célok feldolgozásához olyan alternatív lehetőségekre van szükség, amelyekben semmilyen többszörösen értelmezhető adat nincs.
Ezeket a főbb problémákat kell tehát a következőkben leírt 24 GHz-es rendszernek megoldani.
2. 24 GHz-es rendszerek
A 24 GHz-es (SRR) ún. multilaterális radarhálózat kialakítása az európai Radar Net-projekt részét képezi. A projektben számos autógyártó és radarfejlesztő cég vesz részt a SARA közreműködésével, illetve összefogásával.
Megjegyzés: SARA (Short Range Automotive Radar Frequency Allocation) tagja. Audi, BMW, DaimlerChrysler, Fiat, Ford, Jaguar, MAN, Opel/GM, Porsche, Saab, Seat, Skoda, Volkswagen, Volvo, Autocruise, Autoliv, Bosch, CEL, Continental Ternie, Delphi, Denso, Hella, Inno Sent, Mitshubishi Electronics, Siemens VDO, s.m.s., Takata-Petri, TDK, TRW, Tyco Elektronics Valeo Raytheon Systems, Visteon.
Az SRR frekvenciaszabályozást az USAban hagyták jóvá először 2002-ben, de az Európai Bizottság (EC – European Commision) döntésének hatására a 24 GHz-es radarszenzorok éppen a már említett SARA összefogásának következményeként, mint első generációs radarok 24 GHz-en (SHF/K sáv) Európában is megjelentek.
A 24 GHz-es radarokat arra tervezték, hogy a jármű közvetlen közelében lévő tárgyakat felismerje, detektálja vagy kizárólag elöl és/vagy hátul, illetve 360°-os teljes lefedettséggel. Ez a rendszer 1997 óta van fejlesztés alatt és kismértékű intelligens radaregységeket használ. Érzékelést, nyomkövetést, objektumosztályozást és adatgyűjtő algoritmusokat végez a legújabb technológiát használva, amelynek neve MMIC (Monolithic Microwave Integrated Circuits – monolitikus integrált mikrohullámú áramkör).
A projekt további lehetőségeket is vizsgál, mint pl. összeütközésre történő figyelmeztetés, városi ütközés – amely lényegesen más tulajdonságokkal bír, mint az előző – légzsák ütközés előtti kinyílása, Stop&Go (megáll és elindul) továbbá Stop&Wait (megáll és vár) funkciók.
Segítséget nyújt továbbá a parkolásban és a holtzóna figyelésében, a baleset megelőzésében, illetve az ACC támogatásában. Ezeknek közös tulajdonsága, hogy viszonylag széles azimuth szög és kis távolság biztosítása szükséges a helyes működéshez. Ezeket a radarokat közel radaroknak (NDS – Near Distance Sensors, vagy illetik még SRR – Short Range Radar névvel is) nevezzük.
Az NDS-ekre vonatkozó ezen megállapítást azért fontos megtenni, mert a járművek ACC-működtetésének szintén fontos részét képezik az ún. távol radarok (FDS – Far Dictance Radar Sensor, vagy még illetik LRR – Long Range Radar névvel is), amelyek 77 GHz-en (EHF/M sáv) működnek. Ezt a radartípust viszont éppen ellentétes paraméterek jellemzik, mint a közelradarokat: keskeny nyalábszögű karakterisztika és lényegesen nagyobb mérési távolság. Keskeny nyalábú karakterisztikát könnyebb előállítani, mint a közel radarok igen széles nyalábszögű karakterisztikáját.
A 77 GHz-es radart már bevezették a piacon, de ezeket a távol radar funkcióra alkalmazzák. Ehhez az alkalmazáshoz a 24 GHz-es sáv nem alkalmas, a helyes működéshez szükséges nagy antennaméret miatt. Másrészt a 77 GHz-es radarnak az a hátránya, hogy az alkalmazott karakterisztika nyílásszöge kicsi – jellemzően 10…15°). Ezért van az, hogy ezekkel a rendszerekkel még egy egyszerű Stop&Go (megállás és indulás) funkció sem kezelhető, mert a radar nem képes a sávot teljes szélességében felmérni (főként rövid hatósugárnál) és megtalálni azokat az akadályokat (járműveket), amelyek az indulást akadályozzák. Ennek az oka, hogy rövid távolságon az antennakarakterisztika alacsony nyílásszöge miatt annak keresztmetszete igen kis felületet ad, amelybe nagy valószínűséggel nem esik bele az akadályt okozó jármű. Ha a 77 GHz-es radar antennáját újra terveznék és nagyobbra készítenék, akkor is igen kicsi az esélye annak, hogy a teljes karakterisztika nyílásszöge 60°… 70°-nál nagyobb szöget fedjen le. A nehézségek ellenére is eldöntött tény, hogy az Európai Unióban 2013 közepétől az új járművekben már csak egy frekvenciasávú, 79 GHz-es tartományú radarérzékelőket lehet alkalmazni. A régiekben működők egy még meg nem határozott ideig fennmaradhatnak.
Tehát mint említettük, a 24 GHz-es frekvenciatartományban sem állítható elő a szükséges nagy nyílásszögű antennakarakterisztika egyetlen antennával az eddig ismert antennaelmélet semelyikével. Ez csak radarhálózattal valósítható meg multilaterális technikával.
A multilaterális radarhálózat olyan radarrendszer, amely egy adót és több térbelileg elosztott vevőt tartalmaz. A kialakítás olyan, hogy minden egyes radarszenzor képes adóként és vevőként is funkcionálni. De arra is képes, hogy csak vevő legyen, mint egy multistatikus radarhálózat része. A radarhálózat lehetőséget ad arra, hogy különböző sugárzási szögekkel képes legyen felderíteni a céltárgyakat, mivel minden egyes radarszenzor karakterisztikájának iránya külön-külön állítható, pl. azzal, hogy a radarantenna nyílása valamilyen szöget zár be a jármű hosszanti tengelyével. Ez a megállapítás egyúttal azt is jelenti, hogy az egyes radarszenzorok egyedi karakterisztikáinak eredőjéből adódik a széles nyalábú karakterisztika (1. ábra).
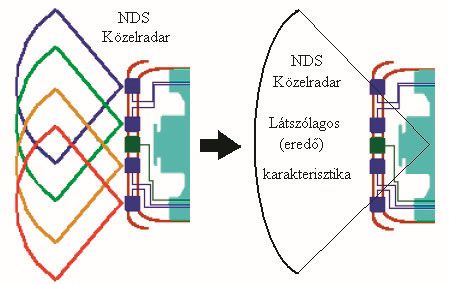
1. ábra
De vizsgáljuk tovább a jelen időszak lehetőségeit. A tervezett alkalmazásokhoz, mint parkolási segítségnyújtás, holtzónafigyelés, ACC-támogatás, balesetmegelőző akadálydetektálás, rövid hatósugár kialakítása indokolt, amelynek maximális értéke átlagosan 30 m. Ezzel a módszerrel a jelenlegi technika mellett már 360°-os lefedettség is lehetővé válik több 24 GHz-es radarszenzor alkalmazása mellett.
A felsorolt módszer egy maximálisan 20 db 24 GHz-es radarszenzorból álló hálózat kialakítását teszi lehetővé. A hálózat kialakításának blokkvázlata a 2. ábrán látható. Ez a rendszer multifunkciós, ami azt jelenti, hogy átkapcsolható balesetmegelőző funkciókból parkolási segítésnyújtási funkcióba, vagy Stop&Go funkcióba, illetve egyéb funkciókba, de lehetséges az ACC-támogatás és a holtzónafigyelés egyidejűleg is.
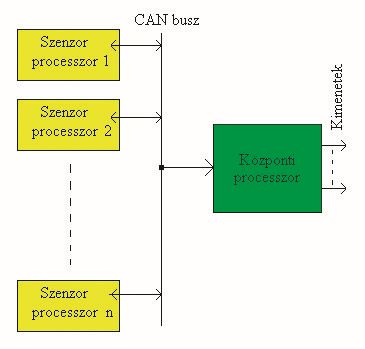
2. ábra
A hálózat minden egyes radarja méri az objektum sebességét és távolságát, de nem határozza meg a szögpozíciót. Ez utóbbit a központi processzor végzi. A 3. ábra a hálózat egy szenzorának felépítését mutatja.
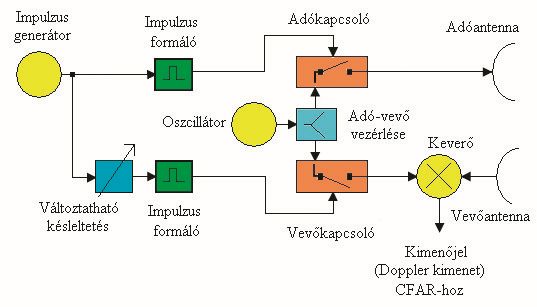
3. ábra
Az impulzusgenerátor jele egyrészt közvetlenül jut el az impulzusformálóba, másrészt egy változtatható késleltető áramkörön keresztül egy másik impulzusformálóba. Ez utóbbi szolgál arra, hogy időben egyesítse ezt a jelet a viszszavert jellel. Az oszcillátor jele egy adó-vevő vezérlő áramkörön keresztül vezérli az adó és a vevő irányának szétválasztását, másrészt kitölti az impulzust a vivőfrekvenciával. Az adáskapcsoló biztosítja, hogy a kisugárzandó jel az adóra jusson. A vevőkapcsoló is biztosítja, hogy az impulzust kitöltse a vivőfrekvenciával. Ez a jel rájut a keverőre, ahová szintén rákerül a visszavert jel, amely kiheveri a különbségi frekvenciát és szolgáltatja a kimenő jelet, további feldolgozás céljából.
A jel további feldolgozása egy érdekes algoritmus szerint történik az ún. CFAR áramkörben.
A radaroknál meg szoktak adni egy küszöbszintet, amely alatt a radarrendszer úgy dönt, hogy nincs cél, felette pedig úgy, hogy van cél. Meg kell jegyezni, hogy az összehasonlító áramkör mindezt adott valószínűséggel hajtja végre. Ez azt jelenti, hogy előfordulhatnak olyan esetek, amikor a rendszer célt jelez, pedig nincs cél, mindössze pl. egy ipari zaj jelentkezik a vevőn, és ez célként mutatkozik. De ennek a fordítottja is igaz. Ezt a jelenséget egységesen felderítési jellemzőnek nevezzük. Hogy a felderítési jellemző egyre közelítsen a valóshoz, a korszerű gépjárműradaroknál a küszöbszintet adaptívvá kell tenni, amely figyelembe veszi a külső és a készüléken belül keletkező zajok nagyságát, amelyek a már említett CFAR által létrehozott algoritmust biztosítják.
Valójában tehát itt arról van szó, hogy a célpontok érzékelése viszonylag könnyű lenne, ha ismernénk a háttérzajt, vagy általában a külső és belső zajokat. Ekkor ugyanis a visszavert jel könnyen felismerhető lenne egy fix értékű küszöbszint megadása mellett. A zaj azonban állandóan változik, ezért szükséges megadnia változó, tehát adaptív küszöbértéket, amelyet a CFAR áramkör biztosít. Sokféle CFAR áramkör létezik. Ezek közül a különböző radarok esetén a feladathoz legjobban illeszkedő algoritmust biztosító CFAR áramkört választják ki.
A szenzor és a központi processzor szoftverje független egymástól, így a központi processzor bármilyen más szenzor (pl. nyomkövető, osztályozó, helyzetelemző, ACC stb.) adatait is magában foglalhatja. Egy radarszenzor adatait az 1. sz. táblázat mutatja.
Nagyon rövid impulzusokkal a tesztek szerint a radar parkolási segítségnyújtás üzemmódban jól működött. Még 20 cm távolságon belül is felismerte a célobjektumokat, bár ebben a tartományban a mérés pontossága romlott, de e távolságon felül az 1 cm pontosság elérhető volt.
A tesztek során bebizonyosodott, hogy a multifunkcionális radarhálózattal történő alkalmazásban igen jó eredmények születtek a parkolási segítségnyújtás és az ACCtámogatás területén, de elfogadhatóak voltak az eredmények a Stop&Go és a holtzónafigyelés területén is.
Bár nem közúti járműre vonatkozik a következő teszt eredménye, de mégis érdemes megemlíteni. Sikeres tesztet végeztek föld alatti vasút vonatkozásában, azok automatikus összekapcsolása területén, ahol a két kocsi közötti távolságot rendkívül precízen kell mérni. A radarok jól vizsgáztak a távolságmérési funkció mellett a vágányon lévő akadályok érzékelésében is. Ezeket a kísérleteket a Volkswagen AG végezte. A bales et megel őző akadálydetektáláson még finomítani kell.
A továbbiakban bemutatjuk a 24 GHz-es a fűrész, vagy háromszög feszültség segítségével modulált folytonos FMCW radar működését, amelylyel egyidejűleg mérhető a távolság és a sebesség. Ez a módszer a 24 GHz-es tartományban működő radar vagyis a közel radar mérésére jellemző. A 4. ábra mutatja a 24 GHz-es Doppler radar egyszerűsített felépítését.
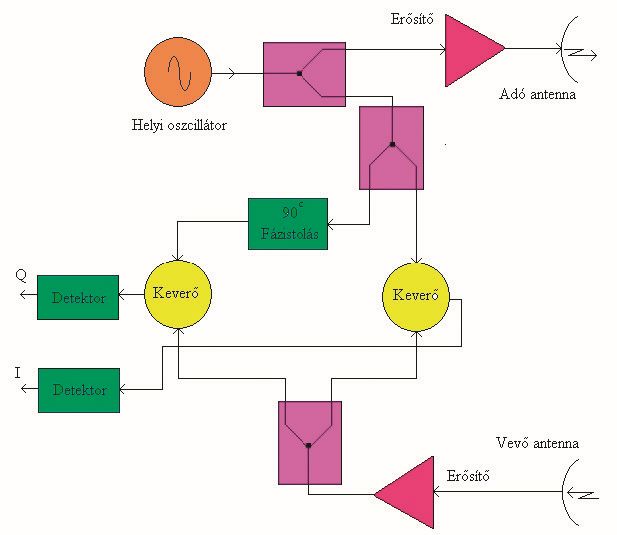
4. ábra
Az ún. I-Q FM-CW radar működése a következő. Egy nagy stabilitású helyi oszcillátor állandó amplitúdójú és frekvenciájú jelet szolgáltat. Ezt a jelet az adó kisugározza (most hagyjuk figyelmen kívül a moduláló jeleket). Ugyanezt a jelet rávezetjük egy 90°-os fázistolóra, majd ezt egy keverőre, de az adó jel egy részét rávisszük egy másik keverőre is. Így van két keverő, amelyre rákerül ugyanaz a visszavert jel.
A keverő létrehozza a középfrekvenciákat, amelyeket detektálunk, így az I kimeneten a sebességet mérhetjük, a Q kimeneten pedig a távolságot.
3. Radarantenna
A Radar Net szenzorainak speciális antennakialakításra van szükségük. Az antenna vízszintes nyílásszögének szélesnek kell lennie, de a függőleges irányú nyílásszögnek keskenynek. Ez utóbbi feltétel azért szükséges, hogy a radar ne mint célt (járművet) érzékelje pl. a csatornafedelet, vagy általában az alacsonyan fekvő rádióhullámokat visszaverő tárgyakat.
A megfelelő sávszélesség eléréséhez több nyomtatott, ún. mikrosztrip antennákat alakítottak ki (5. ábra).
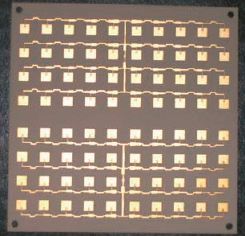
5. ábra
Látható, hogy a 24 GHz-es radar antennája két blokkból áll, ahol az egyik blokk az adóantenna, a másik a vevőantenna. Minden blokk négy vízszintesen elhelyezett 10x4 db antennaelem-rendszerből áll. A betáplálásuk alulról történik. E kétantennás megoldásnak előnye, hogy nem kell cirkulátort alkalmazni (a cirkulátor olyan mikrohullámú elem, amelyik szétválasztja az adót és a vevőt).
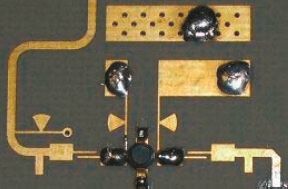
Egy 24 GHz-es radar részegységeit a 6., 7., 8. és 9. ábra mutatja.
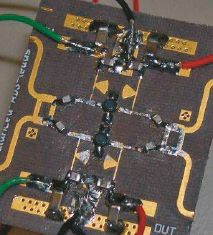
6. ábra
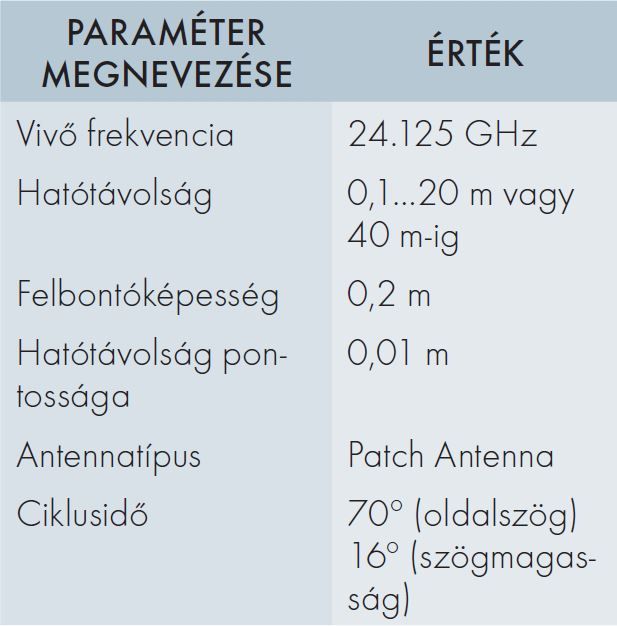
1. táblázat

7. ábra
8. ábra

9. ábra
A 6. ábrán teljesítményerősítő látható a 90°-os hibrid áramkörrel, a 7. ábra mutatja a DRO-t (Dielectric Resonator Oscillator), vagyis a dielektromos helyi oszcillátort. A 8. ábrán a kis zajú bemeneti erősítő és a 9. ábrán a két db diódás keverő nyomtatott kivitele látható. Ebből egyik az I, másik a Q csatornát működteti. A 10. és a 11. ábrák az összeszerelt antennát és a jellemző méretet mutatják, tenyérrel összehasonlítva. Az ismertetett 24 GHz-es Doppler radarszenzor előállítási költsége kevesebb, mint 50 euró.
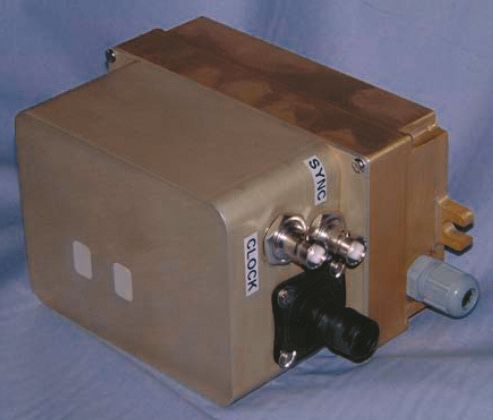
10. ábra
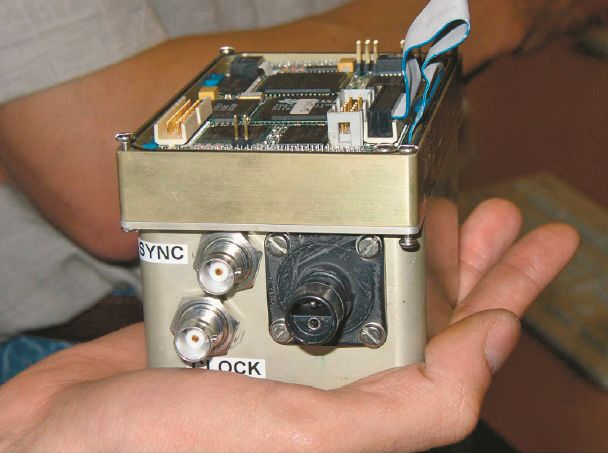
11. ábra
Irodalom:
1. www.who.int/features/2004/road safety/en
2. www.europa.en.int/comm/energy_ transport/library/1b_texte_complet_ en.pdf
3. Karl M. Strohm, Robert Schneider, Josef Wegner Kokon: A Joint Project for the Development of 79 GHz Automotive Radar Sensors, International Radar Symphosium IRS 2005, Procedings, 06- 08 Sept. 2005. Berlin.
4. www.kokon-project.com
5. www.fka.de
6. A. Dankers, L. Petersson, A. Zelinsky: Driver Assistance: Contemporary Road Safety The Australian National University. 2004.
7. The European Product-Standars EN 302288 Parts 1 and 2 (24 GHz SRR) and EN 302264 Parts1 and 2 (79GHz SRR) are after completion available in the Internet ETSI-homepage (www.etsi.org)
8. www.densetraffic.org
9. www.radarnet.org
10. Klotz-H. Rohling: 24 GHz radar sensors for automotive application - Journal of Telecommunications and InformationTechnology. 2001. 4.
11. R. Mende-A. Zander: Multifunctional Automotive Short Range Radar System. 2004.
12. H Rohling- A.Höss,-U. Lübbert – M. Schiementz: Multistatic Radar Principles for Automotive RadarNet Applications. 2005.
13. Multinational Autmotive Radar Network (RadarNet) Final Report. Száma: 14031. 2004.
14. M.Klotz – H.Rohling: 24 GHz radar sensors for automotive application - Journal of Telecommunications and Information Technolgy. 2001. 4.sz
15. www.densetraffic.org.
DR. OLÁH FERENC
OKL. VILLAMOSMÉRNÖK OKL. LOKÁTOR SZAKMÉRNÖK


